yolo目标检测基础知识
前言
博主会经常分享自己在人工智能阶段的学习笔记,欢迎大家访问我滴个人博客!(养成系Blog!)
小牛壮士滴Blog~ - 低头赶路 敬事如仪![]() https://kukudelin.top/
https://kukudelin.top/
一、概念
目标检测需要识别图片或视频帧中的物体是什么类别,并确定他们的位置(where and what),通常用于多个物体的识别,并为每个示例提供一个边界框和类别标签。
-
目标检测的本质:使用边界框将物体在图中圈出,边界框上会存在两个指标:类别信息,置信度
yolo(you only look once):是一个单阶段的目标检测算法,能够用于实时监测
人工智能领域的上游任务和下游任务
-
上游任务通常是指为后续任务提供基础支持的任务,主要关注数据的收集、处理、模型的预训练等基础性工作。这些任务的输出通常是一个通用的模型或者数据集,可以被多个下游任务复用
-
下游任务是指在上游任务的基础上,针对具体的业务场景或应用需求进行的模型微调和应用开发。这些任务通常具有明确的目标和应用场景,需要在预训练模型的基础上进行进一步的优化和调整,以满足特定任务的需求
二、数据标注
数据标注是在图片中框选标注出我们需要模型训练用来检测的实例,用作监督模型训练的标签
步骤:
-
创建一个专门用于数据标注的虚拟环境
conda create -n yololabel python=3.12 -
激活虚拟环境,下载labelimg工具
conda activate yololabel pip install labelimg -i https://pypi.tuna.tsinghua.edu.cn/simpl -
输入命令激活程序
labelimg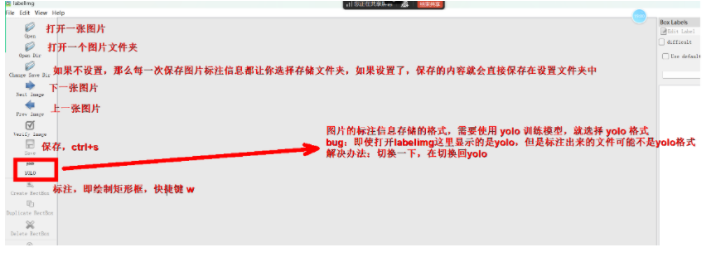
三、目标检测,图像分类,图像分割的区别
目标检测需要识别图片或视频帧中的物体是什么类别,并确定他们的位置(where and what),通常用于多个物体的识别,并为每个示例提供一个边界框和类别标签。

图像分类是指识别图像中主要物体的类别,而不关心物体的具体位置(what)

图像分割指在图像中识别特定类别的物体,并用像素级别的标签来表示这些物体的位置。它不仅需要识别物体是什么,还需要精确地描绘物体的轮廓
-
语义分割:将图像中的每个像素分类为不同的语义类别(如“天空”“道路”“汽车”),不区分同一类别中的不同个体。
-
实例分割:不仅将图像中的像素分类到语义类别,还能区分同一类别中的不同个体(如区分不同的汽车),并为每个个体生成独立的分割掩膜。

四、one-stage和two-stage的简要区别
-
One-stage(单阶段)检测器:直接在输入图像上预测目标的类别和位置,无需先生成候选区域,速度快但精度可能稍低。(yolo)
-
Two-stage(两阶段)检测器:先生成候选区域,再对这些区域进行分类和精确定位,精度高但速度较慢。**(R-CNN、Fast R-CNN、Faster R-CNN)**
五、评测指标
5.1 边界框
边界框包含以下三个信息:
-
类别标签:表示物体类别
-
置信度分数:0到1之间的值
-
边界框坐标:表示矩形框的位置和大小(x,y和w,h)
5.2 交并比(IoU)
交并比用于评估预测框与真实框的重合程度,交集除以并集

5.3 置信度
表示模型对预测结果的可靠性或正确性的信心程度。数值越高,表示模型越有信心认为预测结果是正确的
5.4 混淆矩阵
混淆矩阵依赖于IoU值,在混淆矩阵中:
-
列(Columns):表示真实类别(True Labels)
-
行(Rows):表示预测类别(Predicted Labels)
-
单元格中的数值:表示在该真实类别与预测类别组合下的样本数量
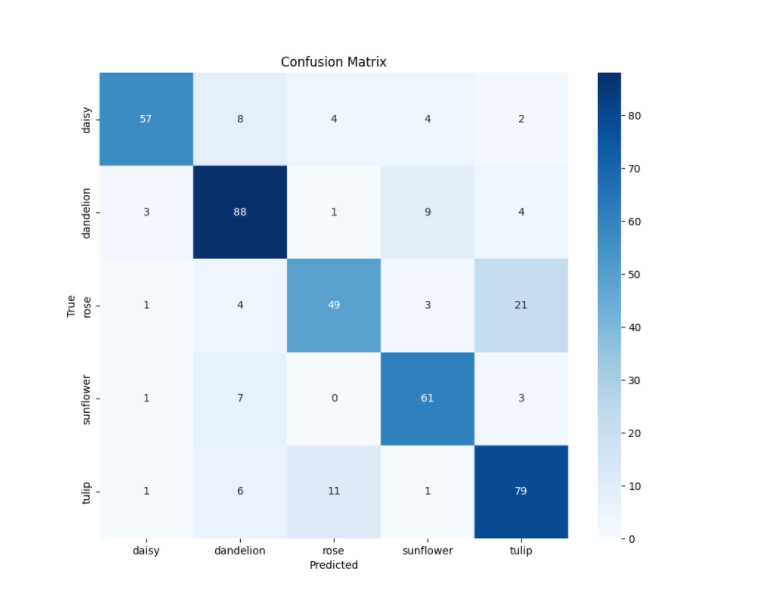
混淆矩阵结合以下四个统计指标,我们有精确度,召回率,准确率和F1分数来评判分类模型好坏

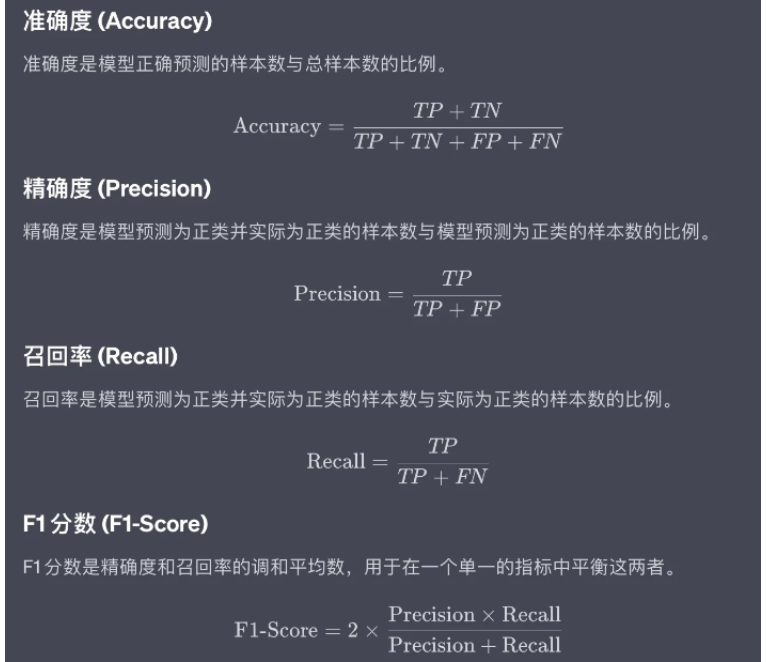
5.4.1 精确度和召回率
-
精确度:所有预测为正类的样本中预测正确的比例
-
召回率:所有实际为正类的样本中,预测正确的比例(可以反映模型优化的可行性)
-
F1分数:精确度和召回率的调和平均数,用于平衡这两个指标
六、 mAP
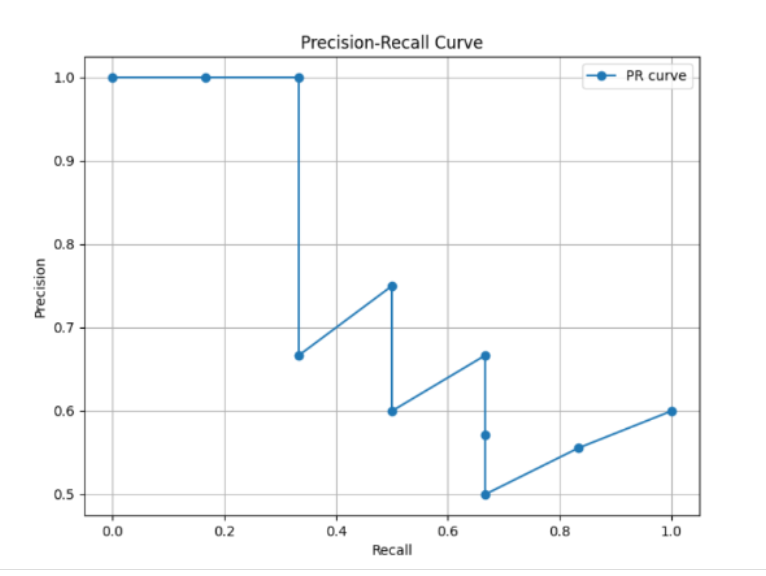
6.1 PR曲线
横轴为召回率,纵轴为精确率,主要用于衡量模型在不同阈值下对正样本的识别能力
PR曲线通过改变分类阈值(例如,模型输出的概率阈值)来生成一系列点,每个点对应一个特定的召回率和精确率,绘制在二维平面上。随着阈值的变化,模型的预测结果会改变,从而影响召回率和精确率
越靠近右上角,模型性能越好
6.2 AP
通俗来讲,AP(平均精确率)是通过计算PR曲线下的面积,表示模型在不同召回率水平下的平均精确率。它是一个介于0到1之间的数值,值越高,表示模型的性能越好
6.3 mAP
mAP(平均平均精度)衡量模型整体性能的综合指标,值越高表示模型在所有类别上的平均表现越好,计算步骤:
-
计算每个类别的 AP:对于数据集中包含的每个类别,分别计算 AP
-
计算 mAP:将所有类别的 AP 取平均值,得到 mAP
七、 NMS非极大值抑制
在目标检测任务中,一个物体可能被多个检测框覆盖,每个检测框都对应一个置信度,NMS用于根据置信度的大小保留置信度最高的检测框,同时抑制(即去除)与之重叠度较高的其他检测框,保留最准确的检测结果。
NMS步骤:
①计算IoU ---->②按照置信度(分类概率 × 目标存在概率)对检测框进行排序---->③选择置信度最高的检测框---->④计算其他框与当前框的 IoU---->⑤移除超过IoU阈值的框---->⑥重复到②---->⑦输出
每个目标最终只会有一个检测框,如果NMS输出了多个结果框,可能检测目标不止一个
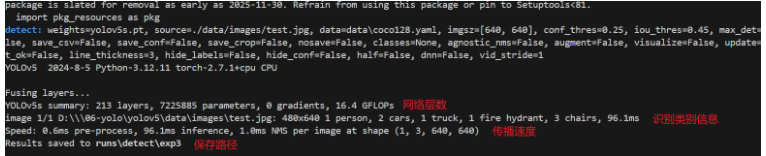
八、处理速度
yolo进行目标检测时会返回三个阶段的时间
-
前处理阶段耗时:数据预处理
-
网络前向传播耗时:从输入图像经过网络各层计算得到输出结果的时间
-
后处理阶段耗时:NMS,置信度过滤,类别筛选等
九、FPS和FLOPS
-
FPS(每秒帧数):是指模型每秒钟可以处理的图像帧数,是衡量实时性的重要指标
-
FLOPS:每秒浮点数运算次数,衡量计算设备性能
十、yolo的三层整体结构
-
Backbone network(主干网络):由卷积网络构成,特征提取
-
Neck network(颈部网络):整合主干网络输出的特征,全连接层或池化层
-
Detection head(检测头):进行目标检测时,输出物体类别和位置

博主后续会在这个栏目更新yolo系列的原理解析以及实战应用 ,敬请关注~~~