认识RobotStudio的软件界面
《ABB工业机器人离线编程与仿真 清华大学出版社 梁伟,李海慧 著 著 CAD/CAM/CAE轻松上手丛书 书籍 图书》【摘要 书评 试读】- 京东图书
RobotStudio软件能够模拟现实中工业机器人工作站的工作情况。在模拟过程中,需要涉及三维模型的建立与导入、工作站的创建与设置、离线编程、仿真、程序的生成与导入等诸多功能。由于这些功能较为复杂且相互关联,操作界面可能会显得较为复杂。
ABB公司将RobotStudio软件按照不同功能划分为多个选项卡,每个选项卡在界面中独立显示,例如“基本”“建模”“仿真”“控制器”等。
为了熟练运用RobotStudio软件进行工业机器人的虚拟仿真和离线编程,我们必须熟悉每个选项卡所能实现的功能。在虚拟仿真过程中,不同界面下显示的窗口可能不同,操作时需要根据窗口内容进行相应操作。有时可能会意外关闭窗口,导致无法找到对应的操作对象或查看相关信息。此时,应重新调出对应的窗口,以满足虚拟仿真的需求。
1.3.1 RobotStudio菜单介绍
打开RobotStudio 2024.2仿真软件,可以看到软件界面的功能区和选项卡,如图1.17所示。

图1.17 软件界面的功能区和选项卡
RobotStudio各选项卡的功能描述如表1.2所示。
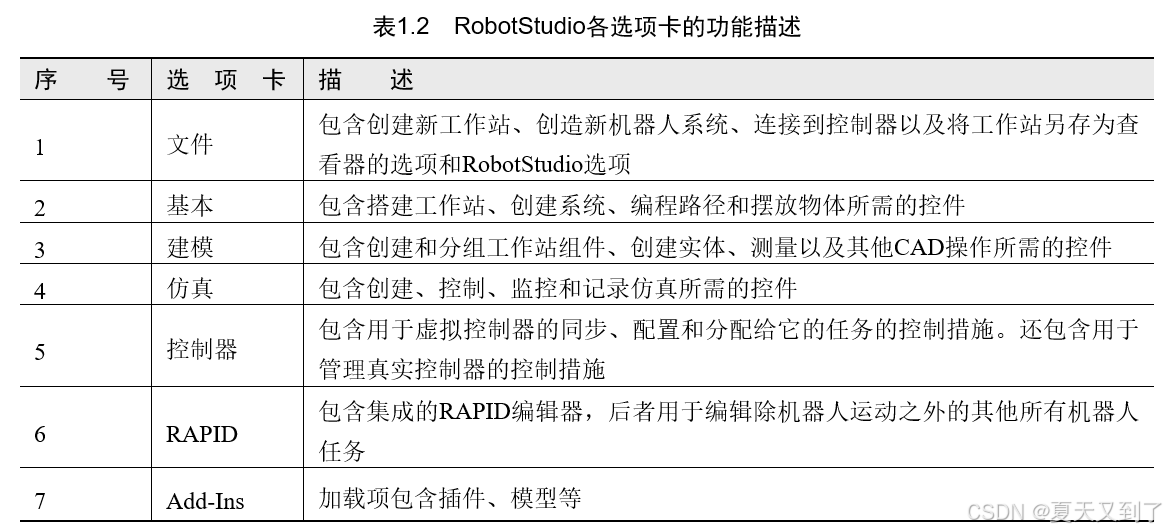
在“文件”功能选项卡中,包含以下功能:保存工作站、另存为、关闭工作站、打开、最近文件、新建、共享、在线、帮助、选项和退出。打开“文件”选项卡后,会进入RobotStudio后台视图,显示当前活动工作站的信息和元数据,列出最近打开的工作站,并提供一系列用户选项(如创建新工作站、连接到控制器、将工作站保存为查看器等),具体功能如图1.18所示。
“基本”功能选项卡包含以下功能:构建工作站、创建系统、编辑路径和摆放项目等,具体功能如图1.19所示。
“建模”功能选项卡包含以下功能:创建、CAD操作、测量、机械和Freehand,具体功能如图1.20所示。
“仿真”功能选项卡包含以下功能:碰撞监控、配置、仿真控制、监控、信号分析器和录制短片,具体功能如图1.21所示。
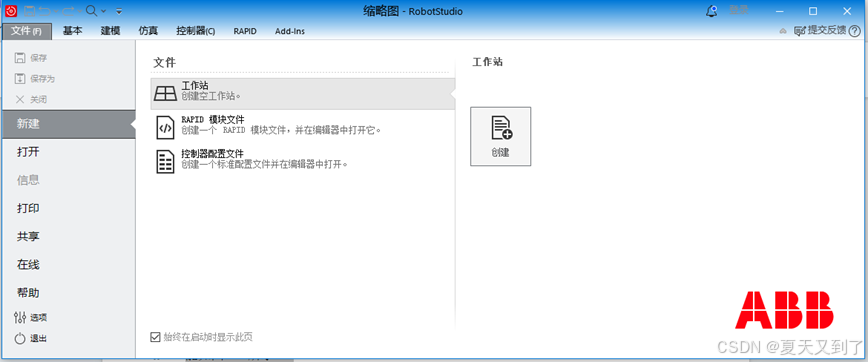
图1.18 “文件”功能选项卡
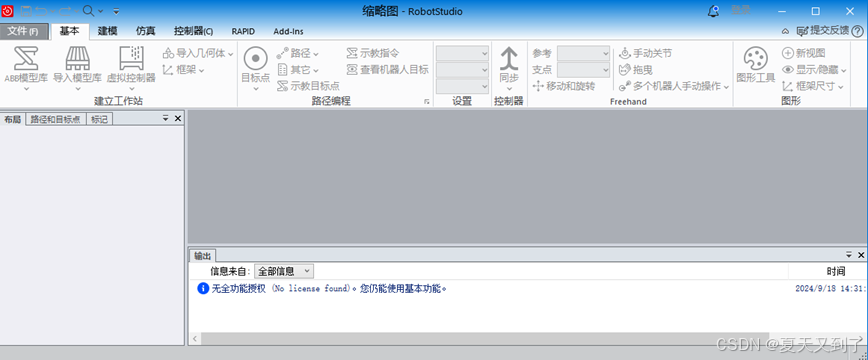
图1.19 “基本”功能选项卡
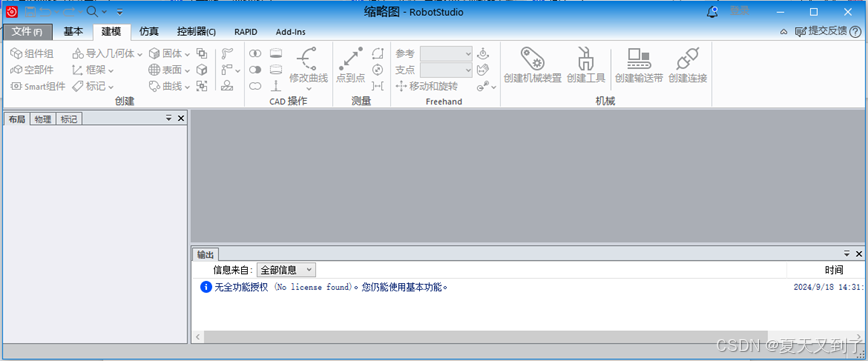
图1.20 “建模”功能选项卡
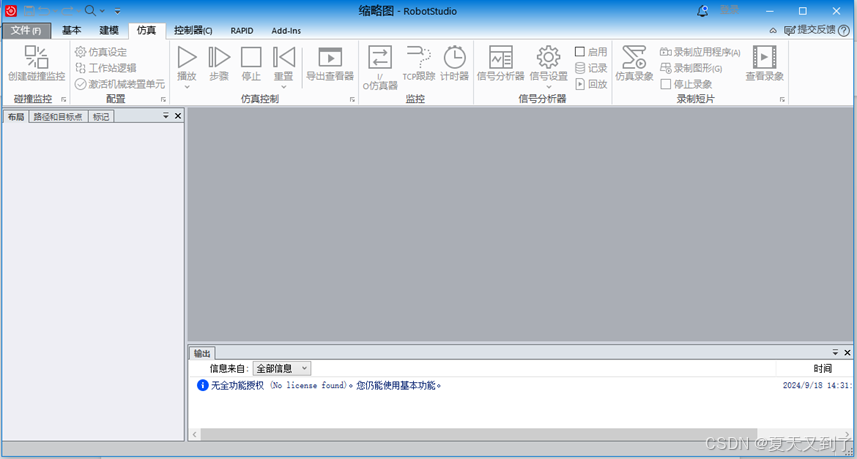
图1.21 “仿真”功能选项卡
“控制器”功能选项卡包含以下功能:进入、控制器工具、配置、虚拟控制器和传送功能,具体功能如图1.22所示。
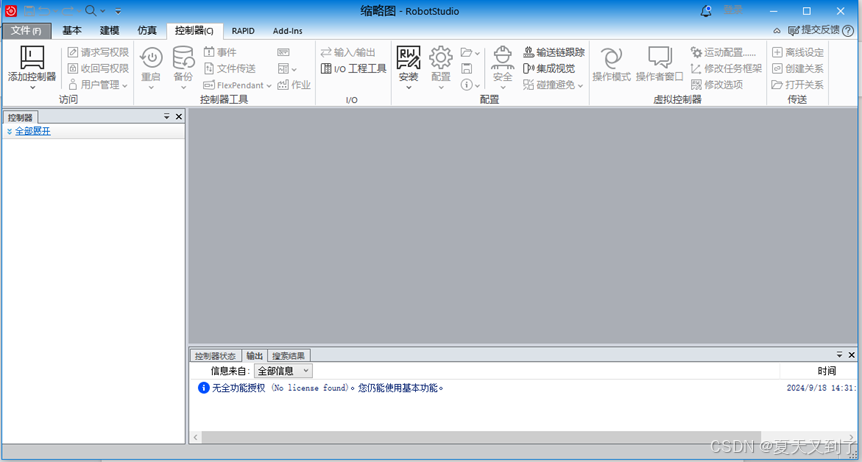
图1.22 “控制器”功能选项卡
RAPID功能选项卡包含以下功能:进入、编辑、插入、查找、控制器、测试与调试、路径编程器,具体功能如图1.23所示。
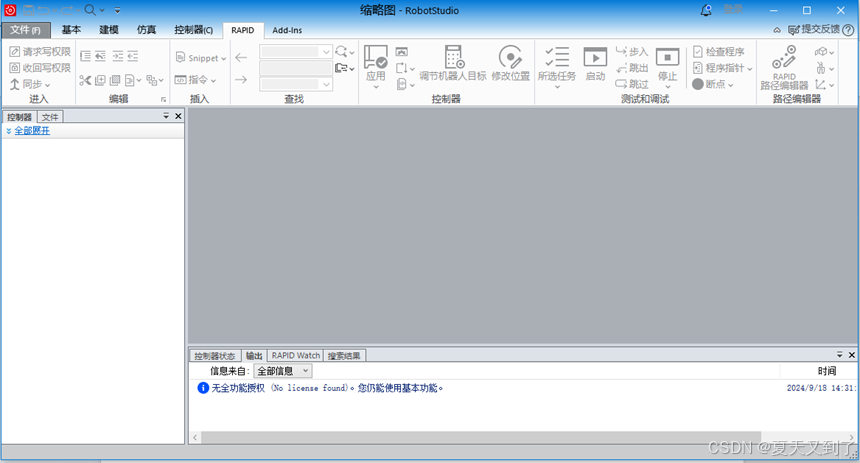
图1.23 RAPID功能选项卡
Add-Ins功能选项卡包含以下功能:缩略图、安装插件等,具体功能如图1.24所示。
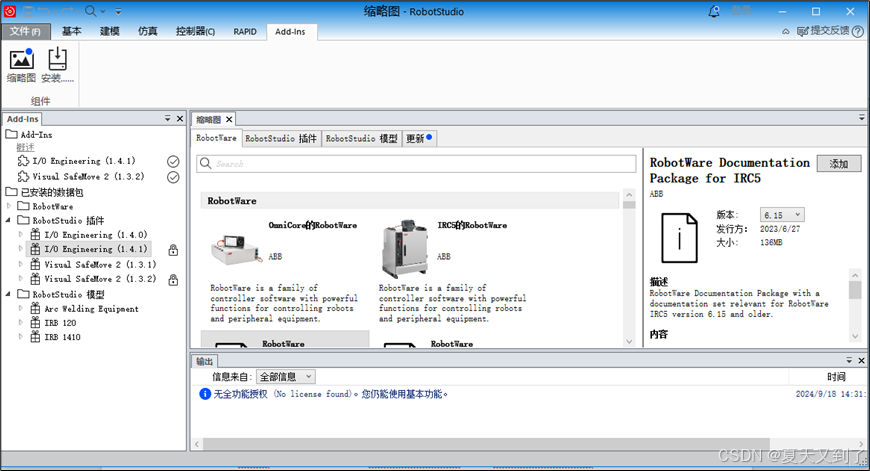
图1.24 Add-Ins功能选项卡
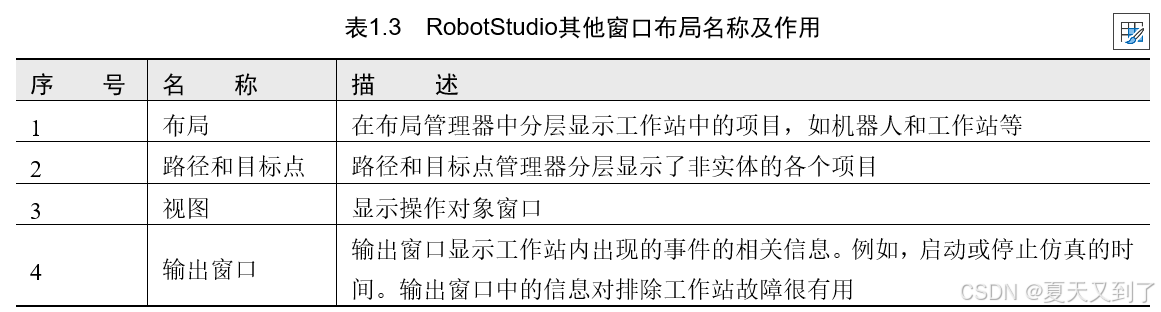
除上述功能选项卡外,RobotStudio的用户界面还包括布局、路径和目标点、标记、视图、输出等管理器,其分布如图1.25所示。
RobotStudio的其他窗口布局名称及作用如表1.3所示。
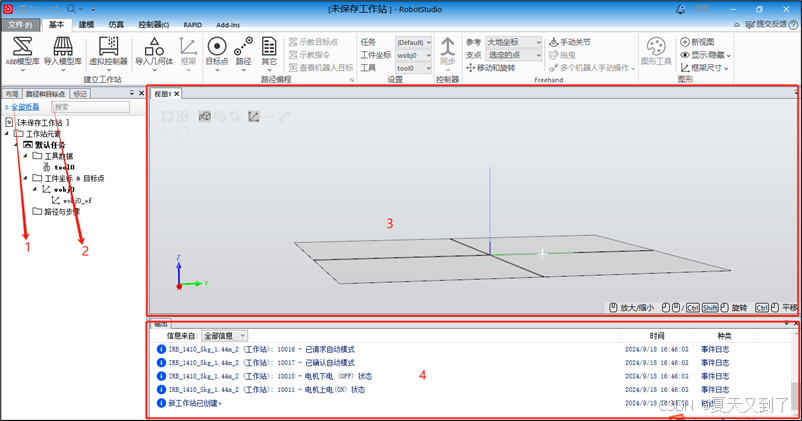
图1.25 RobotStudio其他窗口布局
当用户意外关闭了某个窗口时,可能会导致在软件界面中找不到对应的操作对象和相关信息。例如,用户误关了“布局”和“输出”窗口,如图1.26所示。
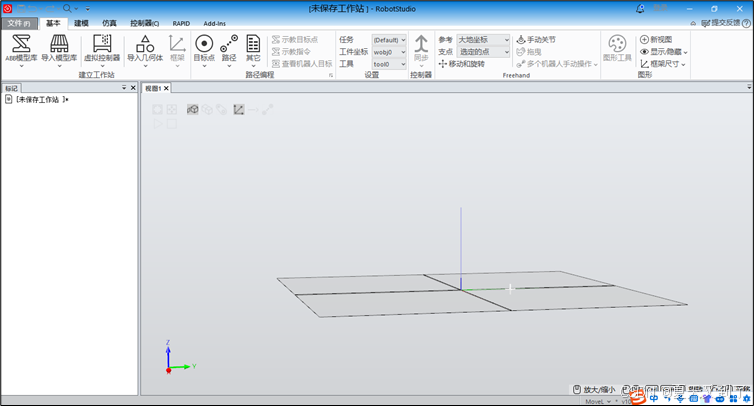
图1.26 用户误关了用户界面中的“布局”和“输出”窗口
此时,用户如果需要重新打开“布局”和“输出”窗口,以便找到对应的操作对象和查看相关消息,只需恢复界面的默认布局即可。具体操作如图1.27所示。
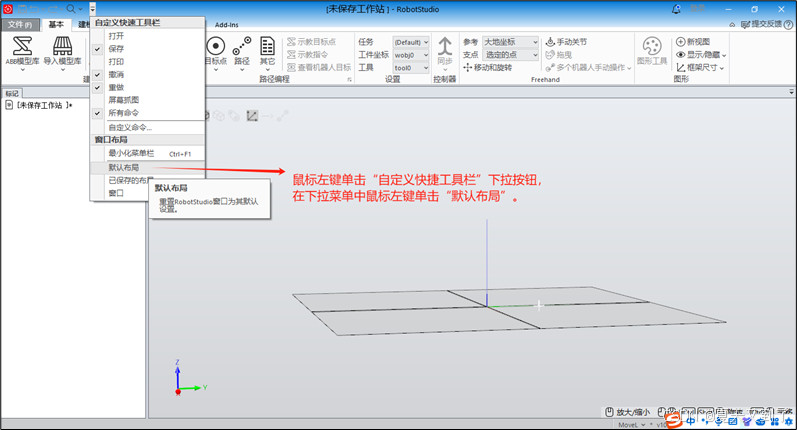
图1.27 恢复界面的默认布局