数据结构【红黑树】
红黑树
- 1.红黑树
- 1.1红黑树的定义
- 1.2红黑树的规则
- 1.3红黑树的效率:
- 2.红黑树的实现
- 2.1红黑树的插入
- 2.1.1 情况1:变色
- 2.1.2 情况2:单旋+变色
- 2.1.3 情况3:双旋+变色
- 2.2红黑树的插入代码实现
- 2.3红黑树的查找
- 2.4红黑树的检查
1.红黑树
1.1红黑树的定义
红黑树是⼀棵二叉搜索树,它的每个结点增加一个存储位来表示结点的颜色,可以是红色或者黑色。
通过对任何一条从根到叶子的路径上各个结点的颜色进行约束,最长的不超过最短的2倍(近似平衡)。
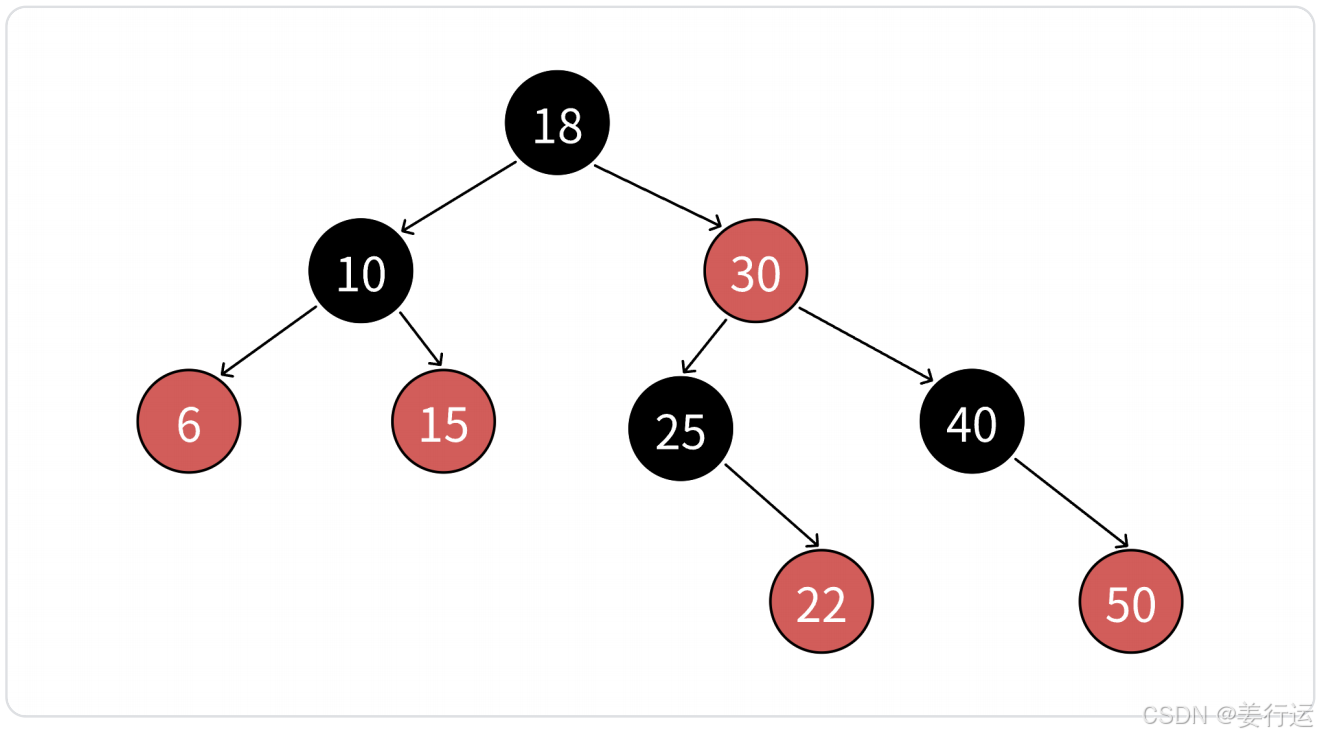
1.2红黑树的规则
- 每个结点不是红色就是黑色
- 根结点是黑色的
- 如果一个结点是红色的,则它的两个孩子结点必须是黑色的,也就是说任意一条路径不会有连续的红色结点。
- 对于任意一个结点,从该结点到其所有NULL结点的简单路径上,均包含相同数量的黑色结点。
最长路径(一黑一红) < = 2*最短路径(全黑)(四条规则约束)
数路径要数到空结点。(NIL结点数路径)
1.3红黑树的效率:
最短路径logN,最长路径2*logN,时间复杂度就是O(logN)。
2.红黑树的实现
2.1红黑树的插入
(插入红色结点,按照二叉搜索树的规则,和四条红黑树的规则)
2.1.1 情况1:变色
-c为红,p为红,g为黑,u存在且为红,则将p和u变黑,g变红。在把g当做新的c,继续往上更新。
情况1只变色,不旋转。所以无论c是p的左还是右,p是g的左还是右,都是上面的变色处理方式。
2.1.2 情况2:单旋+变色
- c为红,p为红,g为黑,u不存在或者u存在且为黑 ,u不存在,则c一定是新增结点,u存在且为黑,则c一定不是新增,c之前是黑色的,是在c的子树中插入,符合情况1,变色将c从黑色变成红色,更新上来的。
2.1.3 情况3:双旋+变色
- c为红,p为红,g为黑,u不存在或者u存在且为黑,u不存在,则c一定是新增结点,u存在且为黑,则c⼀定不是新增,c之前是黑色的,是在c的子树中插入,符合情况1,变色将c从黑色变成红色,更新上来的。
2.2红黑树的插入代码实现
//test.cpp
#include<iostream>
#include<vector>using namespace std;#include"RBTree.h"//void TestRBTree1()
//{
// RBTree<int, int> t;
// // 常规的测试用例
// //int a[] = { 16, 3, 7, 11, 9, 26, 18, 14, 15 };
// // 特殊的带有双旋场景的测试用例
// int a[] = { 4, 2, 6, 1, 3, 5, 15, 7, 16, 14,3,5,66,33,543,54,2,435,321,32,43,4324,534 };
// for (auto e : a)
// {
// t.Insert({ e, e });
// }
//
// t.InOrder();
// cout << t.IsBalanceTree() << endl;
//}
//
//// 插入一堆随机值,测试平衡,顺便测试一下高度和性能等
//void TestRBTree2()
//{
// const int N = 10000000;
// vector<int> v;
// v.reserve(N);
// srand(time(0));
//
// for (size_t i = 0; i < N; i++)
// {
// v.push_back(rand() + i);
// }
//
// size_t begin2 = clock();
// RBTree<int, int> t;
// for (auto e : v)
// {
// t.Insert(make_pair(e, e));
// }
// size_t end2 = clock();
//
// cout << "Insert:" << end2 - begin2 << endl;
// cout << t.IsBalanceTree() << endl;
//
// cout << "Height:" << t.Height() << endl;
// cout << "Size:" << t.Size() << endl;
//
// size_t begin1 = clock();
// // 确定在的值
// /*for (auto e : v)
// {
// t.Find(e);
// }*/
//
// // 随机值
// for (size_t i = 0; i < N; i++)
// {
// t.Find((rand() + i));
// }
//
// size_t end1 = clock();
//
// cout << "Find:" << end1 - begin1 << endl;
//}#include"mymap.h"
#include"myset.h"int main()
{//TestRBTree2();bit::test_set();bit::test_map();return 0;
}
//RBTree.h
enum Colour
{RED,BLACK
};// red black
template<class T>
struct RBTreeNode
{T _data;RBTreeNode<T>* _left;RBTreeNode<T>* _right;RBTreeNode<T>* _parent;Colour _col;RBTreeNode(const T& data):_data(data), _left(nullptr), _right(nullptr), _parent(nullptr), _col(RED){}
};template<class K, class T, class KeyOfT>
class RBTree
{typedef RBTreeNode<T> Node;
public:bool Insert(const T& data){if (_root == nullptr){_root = new Node(data);_root->_col = BLACK;return true;}KeyOfT kot;Node* parent = nullptr;Node* cur = _root;while (cur){if (kot(cur->_data) < kot(data)){parent = cur;cur = cur->_right;}else if (kot(cur->_data) > kot(data)){parent = cur;cur = cur->_left;}else{return false;}}// 新插入红色节点cur = new Node(data);cur->_col = RED;if (kot(parent->_data) < kot(data)){parent->_right = cur;}else{parent->_left = cur;}cur->_parent = parent;while (parent && parent->_col == RED){Node* grandfather = parent->_parent;if (parent == grandfather->_left){Node* uncle = grandfather->_right;// 1、u存在且为红if (uncle && uncle->_col == RED){// 变色parent->_col = uncle->_col = BLACK;grandfather->_col = RED;//继续往上处理cur = grandfather;parent = cur->_parent;}else // 2、u不存在或者u存在且为黑{if (cur == parent->_left){// g// p u//cRotateR(grandfather);parent->_col = BLACK;grandfather->_col = RED;}else{// g// p u// cRotateL(parent);RotateR(grandfather);cur->_col = BLACK;grandfather->_col = RED;}break;}}else // (parent == grandfather->_right){Node* uncle = grandfather->_left;// 1、u存在且为红if (uncle && uncle->_col == RED){// 变色parent->_col = uncle->_col = BLACK;grandfather->_col = RED;//继续往上处理cur = grandfather;parent = cur->_parent;}else // 2、u不存在或者u存在且为黑{if (cur == parent->_right){// g// u p // cRotateL(grandfather);parent->_col = BLACK;grandfather->_col = RED;}else{// g// u p// cRotateR(parent);RotateL(grandfather);cur->_col = BLACK;grandfather->_col = RED;}break;}}}_root->_col = BLACK;return true;}void InOrder(){_InOrder(_root);cout << endl;}int Height(){return _Height(_root);}int Size(){return _Size(_root);}Node* Find(const K& key){KeyOfT kot;Node* cur = _root;while (cur){if (kot(cur->_data) < key){cur = cur->_right;}else if (kot(cur->_data) > key){cur = cur->_left;}else{return cur;}}return nullptr;}private:int _Size(Node* root){return root == nullptr ? 0 :_Size(root->_left) + _Size(root->_right) + 1;}int _Height(Node* root){if (root == nullptr)return 0;int leftHeight = _Height(root->_left);int rightHeight = _Height(root->_right);return leftHeight > rightHeight ? leftHeight + 1 : rightHeight + 1;}void _InOrder(Node* root){if (root == nullptr){return;}_InOrder(root->_left);cout << root->_kv.first << " ";_InOrder(root->_right);}void RotateR(Node* parent){Node* subL = parent->_left;Node* subLR = subL->_right;parent->_left = subLR;if (subLR)subLR->_parent = parent;Node* ppnode = parent->_parent;subL->_right = parent;parent->_parent = subL;if (parent == _root){_root = subL;subL->_parent = nullptr;}else{if (ppnode->_left == parent){ppnode->_left = subL;}else{ppnode->_right = subL;}subL->_parent = ppnode;}}void RotateL(Node* parent){Node* subR = parent->_right;Node* subRL = subR->_left;parent->_right = subRL;if (subRL)subRL->_parent = parent;Node* ppnode = parent->_parent;subR->_left = parent;parent->_parent = subR;if (parent == _root){_root = subR;subR->_parent = nullptr;}else{if (ppnode->_left == parent){ppnode->_left = subR;}else{ppnode->_right = subR;}subR->_parent = ppnode;}}private:Node* _root = nullptr;
};
2.3红黑树的查找
按二叉搜索树逻辑实现即可,搜索效率为 O(logN)
2.4红黑树的检查
牢记四条规则。