Nvidia Isaac Sim机械臂实验
Prerequisite:电脑要有显卡
使用平台,Windows 2011(下载Isaac Sim 4.5 大约6.5G) + WSL(安装Ubuntu 22.04)
参考第一个链接进行。中间可能会遇到几个问题:
1:WSL闪退或者WSL无法安装Ubuntu
可以先在终端CMD中运行WSL,另外也可能是需要上外网。
安装wsl时报如下错,
无法从“https://raw.githubusercontent.com/microsoft/WSL/master/distributions还可能需要配置DNS如下。
首选DNS:8.8.8.8(Google DNS)
备用DNS:114.114.114.114(国内DNS)或223.5.5.5(阿里DNS)然后分别使用如下命令安装和启动Ubuntu
wsl --install -d Ubuntu-22.04-LTS
wsl -d Ubuntu-22.042:不能选择humble库
Isaac Sim目录下cmd运行 isaac.selector.bat后,可能出现如图
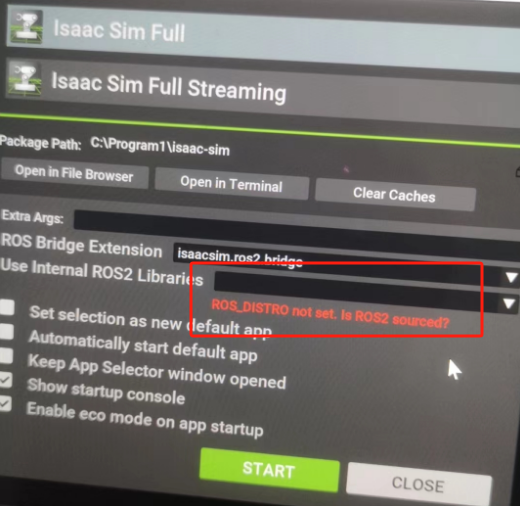
原因:可能需要先在WSL Ubuntu环境中安装ROS2,并做相关配置。
安装ROS Ubuntu (deb packages) — ROS 2 Documentation: Humble documentation
3:导入SO-ARM中urdf文件失败
按照参考链接第一个操作,会失败,报下面runtime callback错误,
File "c: /program1/isaac-sim/extscache/isaacsim.asset,importer.urdf-2.3.10+106.4.0.wx64.r.cp310/isaacsim/asset/importer
/urdf/scripts/commands.py",line 145,in do
return self._urdf interface.import_robot(
<class 'RuntimeError'> Used null prim2025-07-23 08:53:49[69,851ms][Error] [omni.ui.python] RuntimeError:Accessed invalid null prim
At:c: /program1/isaac-sim/extscache/isaacsim,asset.importer,urdf-2.3.10+106.4.0.wx64.r.cp31@/isaacsim/asset/importer/urdfscripts/extension.py(594):_load robotc:/program1/isaac-sim/extscache/isaacsim,asset,importer.urdf-2.3.10+106.4.0.wx64.r.cp31e/isaacsim/asset/importer/urdfscripts/extension.py(459):overwrite_callback导入官方链接GitHub repo的
Simulation/SO101/so101_new_calib.urdf
则能成功。https://github.com/TheRobotStudio/SO-ARM100/tree/main
安装ROS2
基本按照这个官方指导 ROS 2 Installation — Isaac Sim Documentation
其中,完全按照这个指导来部署环境 ROS 2 Installation — Isaac Sim Documentation
导入成功后,一开始会看到三维坐标,稍后(等待下载)会看到金色的机械臂,就基本大功告成了。
剩下的,
1. 添加Graph Controller组件并且连线 (参照第一条博文链接)
2:在Ubuntu中添加控制程序,执行即可(代码COPY第二条博文链接)
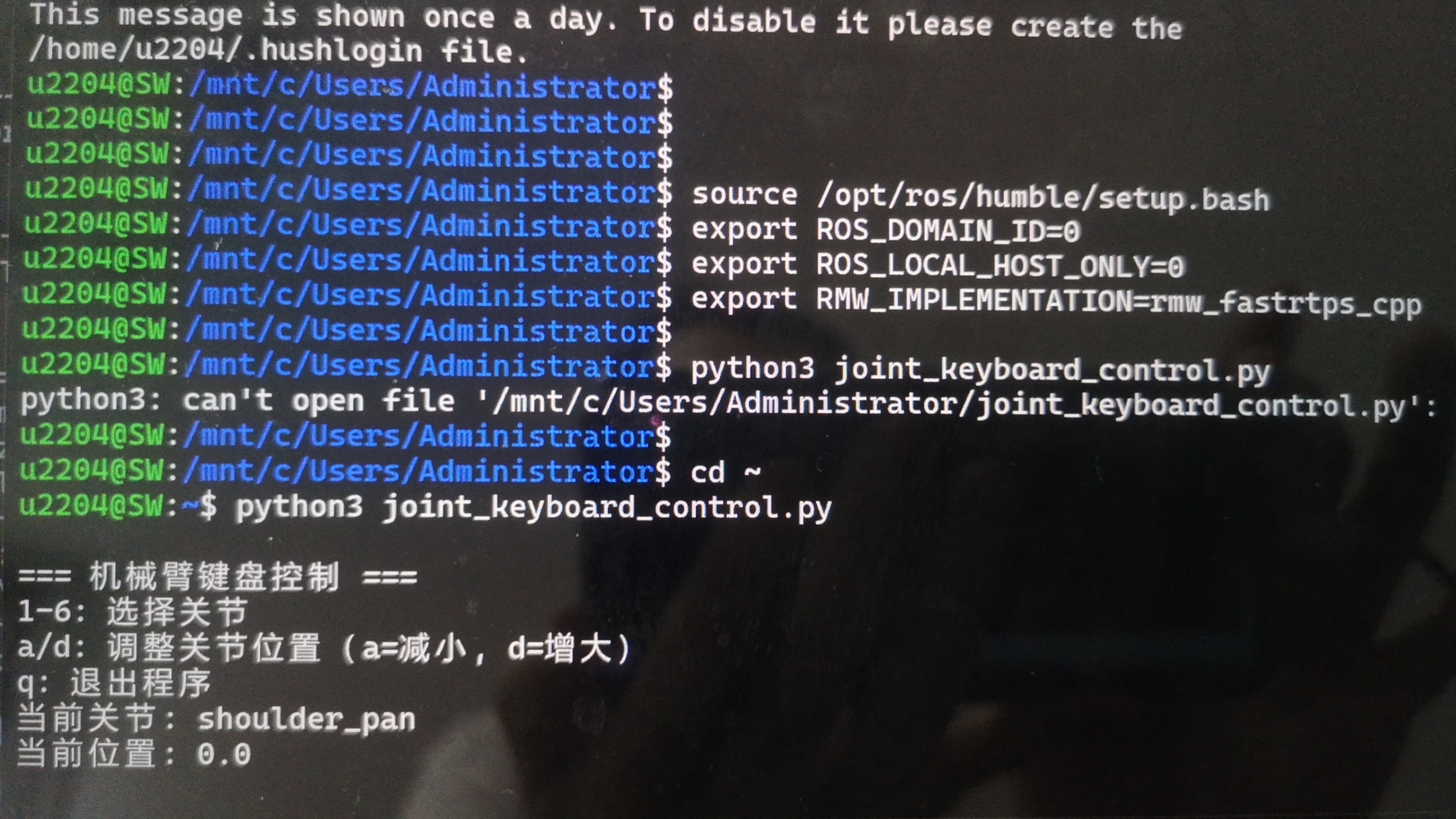
//按照提示 1——6选择机械臂,A/D选择远近操作,观察机械臂。
参见以下几篇博文
如何在 Isaac Sim 中导入和控制 SO100Arm Kit-CSDN博客
Isaac Sim 5 与 ROS2 机械臂仿真教程 - DEV Community
你的AI机器人开发第一课:从Isaac Sim仿真开始_哔哩哔哩_bilibili
Install WSL | Microsoft Learn
Enable Virtualization on Windows - Microsoft Support