《一种利用电阻抗和声学断层扫描进行触觉感应的仿生弹性机器人皮肤》论文解读
该论文提出了一种模仿人类皮肤结构与功能的仿生机器人皮肤,通过水凝胶 - 弹性体复合材料与断层成像技术,实现了多模态触觉感知,有效解决了现有柔性触觉传感器在结构复杂性、可扩展性和易损性等方面的局限。
目录
一、仿生多层结构设计
1.1 仿生多层结构与人体皮肤的对比
1.2 多层结构的保护功能
1.3 水凝胶层作为触觉传感介质
1.4 基于分布式传感元件的可扩展性
1.5 机器人皮肤的可修复性
二、深压力传感:电阻抗断层扫描
2.1 EIT 深压力传感流程
2.2 优化的电极测量模式
2.3 基于 DNN 的 EIT 重建算法
2.4 不同形状深压力的重建结果
三、动态触觉传感:被动声学断层扫描
3.1 麦克风阵列的动态触觉测量流程
3.2 PAT 振动源定位原理
3.3 动态刺激定位与轨迹可视化
四、触觉模式分类:卷积神经网络
4.1 CNN 触觉模式分类流程
4.2 不同触觉模式的特征图像示例
4.3 分类结果混淆矩阵
五、可修复性
六、传感器化假肢的应用
一、仿生多层结构设计
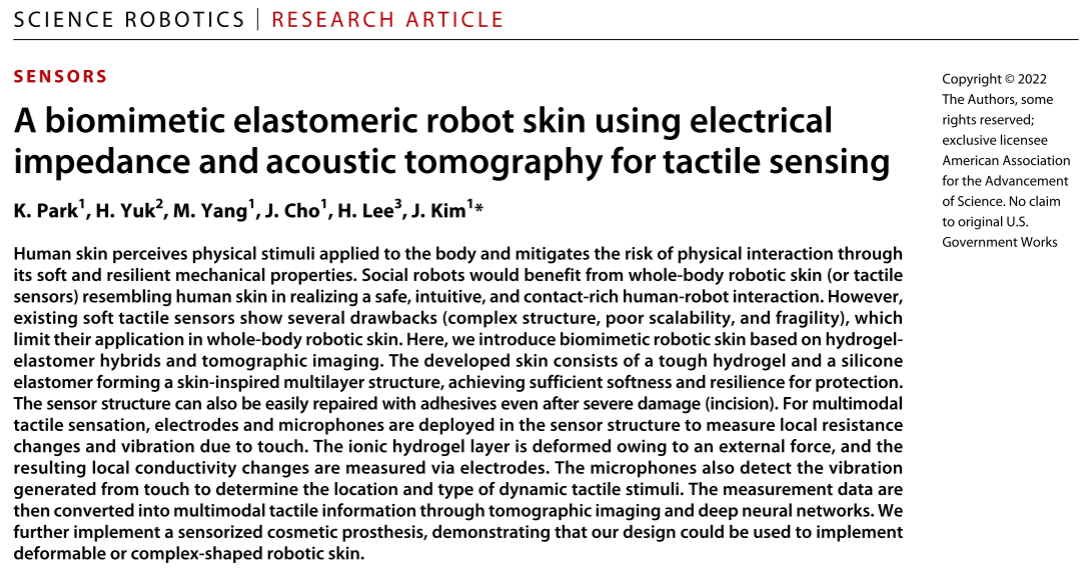
该仿生机器人皮肤的多层结构设计灵感来源于人体皮肤的三层结构(表皮、真皮和皮下组织),各层具有特定的材料组成和功能,且通过化学处理实现层间紧密结合,避免外力作用下分层。
1.1 仿生多层结构与人体皮肤的对比
人体皮肤由表皮(最外层,防水屏障,杨氏模量约 2 MPa)、真皮(弹性层,含胶原纤维,可拉伸 25% 并恢复)、皮下组织(厚且易变形的缓冲层)组成,且不同层次分布有机械感受器(如 Pacinian 小体、Ruffini endings 等)。
仿生机器人皮肤对应由弹性体皮肤(外层,类似表皮,坚韧且防水)、水凝胶层(厚缓冲层,类似皮下组织)、基层(支撑层,类似筋膜)组成,基层上分布有电极和麦克风(类似人体的机械感受器)。
两者均通过外层的韧性和内层的缓冲性实现保护功能,且传感元件均分布在深层结构中。
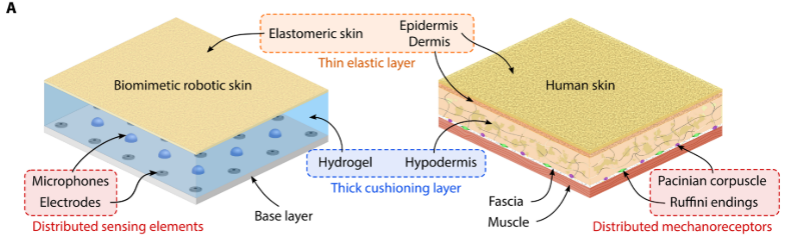
1.2 多层结构的保护功能
水凝胶层的柔顺性可缓冲外力,弹性体皮肤则能承受力并将其分散到更大区域,形成空间滤波效应,类似人体皮肤的缓冲功能。
通过定制多层结构的几何形状和机械性能(如弹性模量和厚度),可满足不同损伤的安全标准,例如挫伤(能量密度 < 2.52 J/cm²)和撕裂(拉伸应力 < 1 MPa)。
这种保护功能由多层结构的机械特性实现,不受传感灵敏度和带宽的影响。
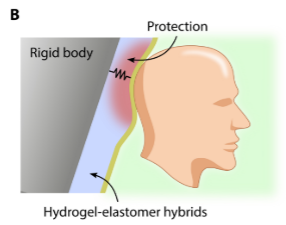
1.3 水凝胶层作为触觉传感介质
水凝胶含大量水分和电解质,具有导电性,在外力作用下变形时,可通过电极测量电阻变化以感知压力。
同时,水凝胶能传递触摸表面产生的振动,麦克风可检测这些振动以感知动态触觉刺激(如轻触)。
这种特性使机器人皮肤既能检测微弱振动,也能感知高达 20 N 的力,覆盖人类典型触摸交互(如抚摸、按压)的范围。
1.4 基于分布式传感元件的可扩展性
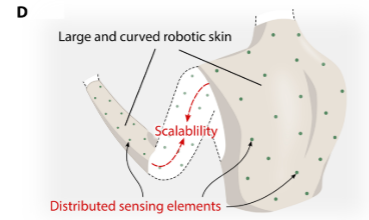
电极和麦克风等传感元件具有较大且重叠的感受野,少量元件即可覆盖大面积区域。
传感元件可在大型、弯曲甚至可变形的表面上自由排列,添加新元件时不会影响现有元件的功能,因此能轻松调整机器人皮肤的尺寸。
这种设计解决了传统传感器在大面积或复杂曲面应用中的局限性。
1.5 机器人皮肤的可修复性
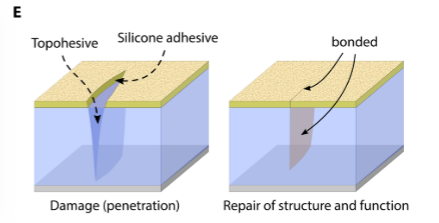
即使遭受穿透性损伤(如切割),也可通过粘合剂恢复多层结构的电学和机械性能。
具体而言,用水凝胶粘合剂(如壳聚糖拓扑粘合剂)修复水凝胶层,用硅酮粘合剂修复弹性体皮肤,修复后结构和功能可完全恢复,包括对压力和振动的感知能力。
这种可修复性类似人体皮肤的自我修复能力,提升了机器人皮肤的实用性和耐用性。
二、深压力传感:电阻抗断层扫描
该技术利用离子水凝胶的导电特性和变形时的阻抗变化实现深压力检测:水凝胶含电解质且具有导电性,在外力作用下发生局部变形,导致电流通过的横截面减小,电极间阻抗随压痕深度成比例增加(检测下限约 0.7 N,滞后性 < 3%)。通过电阻抗断层扫描(EIT)技术,结合电极测量的阻抗数据,再利用深度神经网络(DNN)重建变形图,可实现对深压力位置和强度的精准感知。
2.1 EIT 深压力传感流程
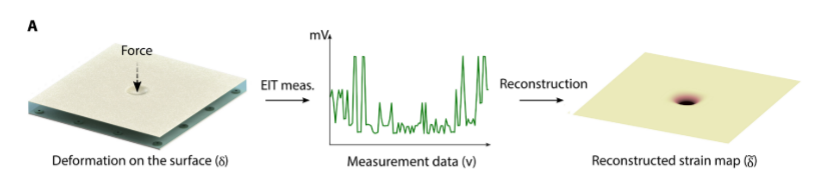
- 表面变形:外力(如压力)作用于机器人皮肤表面,导致内部水凝胶层局部变形;
- 电极测量:均匀分布在水凝胶与基层之间的金属电极,通过注入 40 kHz 交流电并测量电极对间的电压变化,获取阻抗数据(采用交流电可减少电极与电解质界面的双电层电容影响);
- 数据重建:将测量数据通过 EIT 重建算法转换为反映水凝胶变形分布的 “变形图”,直观呈现压力的位置和强度。
2.2 优化的电极测量模式
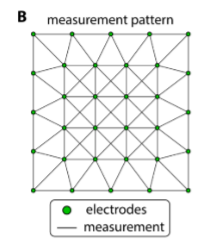
电极配置:图中绿色圆圈代表 32 个金属电极,这些电极被均匀地布置在水凝胶层与基层之间的方形区域内,电极间距约为 40 mm(电极密度为 0.08 个 /cm²)。这种均匀分布方式确保了对皮肤表面不同位置的压力都能进行有效检测。
测量对设计:黑色线条表示电极测量对,即通过特定的电极对组合进行交流电的注入和电压测量。研究中采用启发式方法确定了这种最佳测量模式,通过在不同电极对之间循环注入 40 kHz 的交流电并测量相应的电压变化,能够全面捕捉水凝胶层因压力变形而产生的阻抗分布差异,为后续通过深度神经网络(DNN)重建变形图提供了丰富的原始数据
这种电极布置和测量模式的设计,在保证传感精度的同时,避免了复杂的布线,兼顾了机器人皮肤的可扩展性和实用性,是实现高效 EIT 深压力传感的重要保障。
2.3 基于 DNN 的 EIT 重建算法
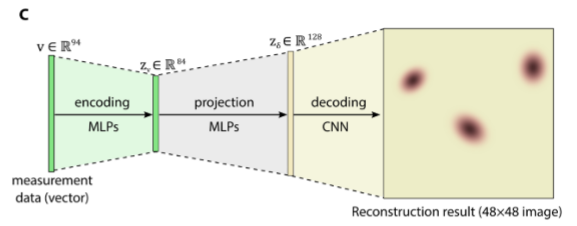
利用深度神经网络(DNN)实现电阻抗断层扫描(EIT)数据重建的流程,旨在将电极测量的电压数据转换为反映水凝胶变形分布的高分辨率图像,解决传统 EIT 算法在精度、速度和抗噪性之间的权衡问题。
该算法流程主要包含以下关键步骤:
- 测量向量编码:将电极采集的测量向量(长度为 94)通过多层感知器(MLP)映射到 84 维的潜在变量空间,实现对原始数据的特征提取和降维;
- 变形图解码:将上述潜在变量通过卷积神经网络(CNN)生成 48×48 分辨率的变形图,直观呈现水凝胶层的局部变形分布,即深压力的位置和强度。
为提升性能,网络训练采用了模拟数据(因实验获取大量数据不现实),并在训练中加入高斯噪声,使模型具备抗噪性和去噪能力。解码器部分采用 “上采样 + 卷积” 操作而非转置卷积,避免棋盘格伪影,且所有层均使用指数线性单元(ELU)作为激活函数。
这种基于 DNN 的 EIT 算法,相比传统方法,在重建精度、对噪声的鲁棒性和速度上均有显著提升,能够实时生成高质量的变形图,为机器人皮肤精准感知深压力提供了核心计算支撑
2.4 不同形状深压力的重建结果

实验中用手或不同形状物体按压机器人皮肤,通过 DNN-based EIT 算法得到重建结果;
可清晰重建 “多点接触”“圆形接触”“条形接触”“扳手形接触” 等多种压力模式的变形图,证明即使在电极密度较低(0.08 个 /cm²)的情况下,仍能实现高精度的压力感知。
三、动态触觉传感:被动声学断层扫描
该技术通过麦克风检测动态刺激产生的振动信号,实现对轻拍、挠痒、抚摸等动态触觉的定位和感知。当动态刺激作用于弹性体皮肤表面时,会产生微振动并通过多层结构(弹性体皮肤、水凝胶层)传递至基层,被均匀分布的麦克风接收。由于振动能量随传播距离逐渐衰减,通过被动声学断层扫描(PAT)技术分析不同麦克风接收信号的强度差异,可反演振动源(即动态刺激)的位置,结合振动信号的时空特征还能进一步区分刺激类型。
3.1 麦克风阵列的动态触觉测量流程
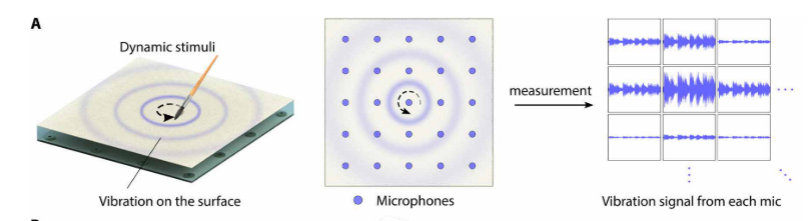
- 动态刺激与振动产生:外部动态刺激(如轻触、抚摸)作用于机器人皮肤表面,引发微振动;
- 振动传递:振动通过弹性体皮肤和水凝胶层传递至基层,由于水凝胶的柔顺性,振动可在多层结构中高效传播;
- 麦克风检测:均匀分布在基层的麦克风(每个麦克风被硅酮胶囊包裹,可感知约 5.5 cm 范围内的振动)捕捉振动信号,记录不同位置的振动强度变化;
- 信号分析:通过分析各麦克风的振动信号,提取强度、频率等特征,为后续定位和模式分类提供数据。
3.2 PAT 振动源定位原理
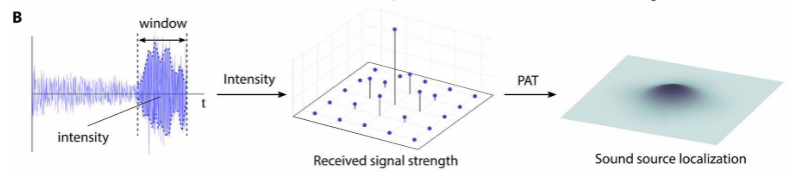
核心依据是 “振动强度随传播距离衰减”:距离振动源越近的麦克风,接收的信号强度越高;反之则越低。
定位过程通过定义 “信号强度 - 距离” 衰减模型的代价函数,通过最小化代价函数计算振动源的坐标,实现对动态刺激位置的精准估计。
3.3 动态刺激定位与轨迹可视化
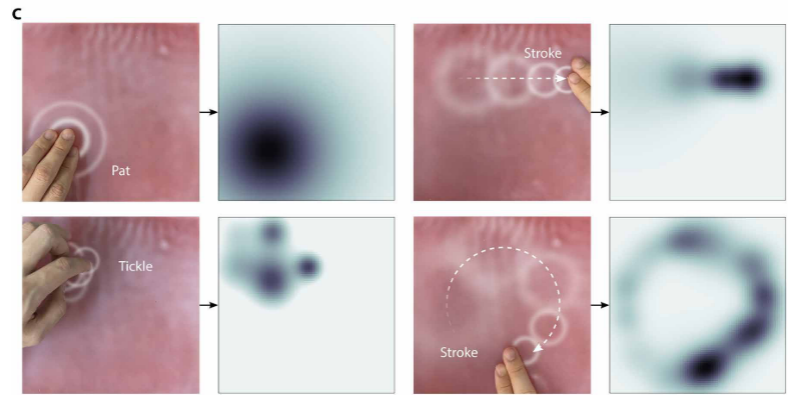
实验中分别施加 “轻拍(Pat)”“挠痒(Tickle)”“抚摸(Stroke)” 等动态刺激,通过 PAT 算法处理麦克风信号,成功定位刺激位置并生成轨迹图(图中通过随时间衰减的权重滤波,清晰呈现刺激的移动路径)。
结果表明,即使在麦克风密度较低(0.0625 个 /cm²)的情况下,仍能准确追踪动态刺激的轨迹,单点定位均方根误差约 6.6 mm,验证了 PAT 技术在动态触觉传感中的有效性。
四、触觉模式分类:卷积神经网络
人类皮肤能通过刺激的强度、位置和模式区分触觉模态(如挠痒、抚摸),并将其解读为社交线索或意图信号。该仿生机器人皮肤通过分析振动信号的时空特征,利用卷积神经网络(CNN)实现对动态触觉模式的分类。其核心逻辑是:不同触觉模式(如轻拍、挠痒、抚摸)产生的振动具有独特的频率和空间分布特征,通过提取这些特征并输入 CNN,可实现高精度分类,为人机触觉通信提供基础。
4.1 CNN 触觉模式分类流程
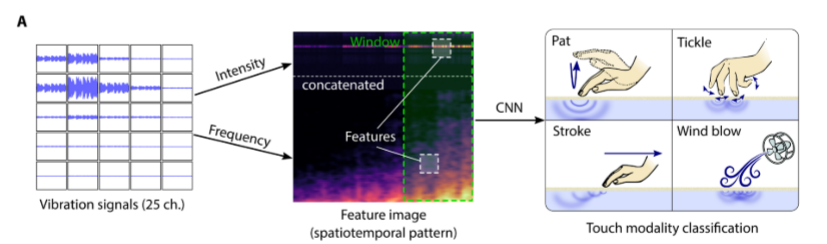
- 振动信号采集:获取每个麦克风的振动强度历史数据,记录不同时间窗口内的信号变化;
- 特征提取:从最显著的信号通道中提取频谱图(反映频率随时间的变化),将振动强度历史与频谱图拼接为 2D 特征图像,整合振动的时空与频率特征;
- CNN 分类:将特征图像输入 CNN,通过卷积层提取局部特征、全连接层输出分类结果,实现对动态触觉模式(如轻拍、挠痒、抚摸、风吹)的识别。
4.2 不同触觉模式的特征图像示例
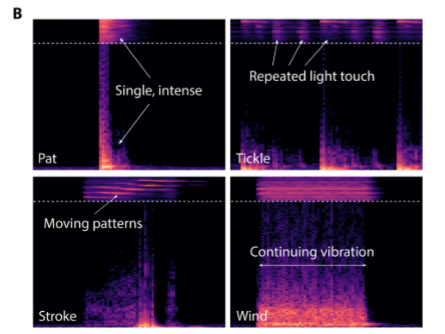
“轻拍(Pat)”“挠痒(Tickle)”“抚摸(Stroke)”“风吹(Wind blow)” 四种动态触觉模式的特征图像:
每种模式的特征图像具有独特的时空 - 频率分布:例如,挠痒表现为高频重复的振动信号,抚摸呈现连续的低频移动模式,风吹则显示无规律的弱振动。这些差异是 CNN 分类的关键依据。
4.3 分类结果混淆矩阵
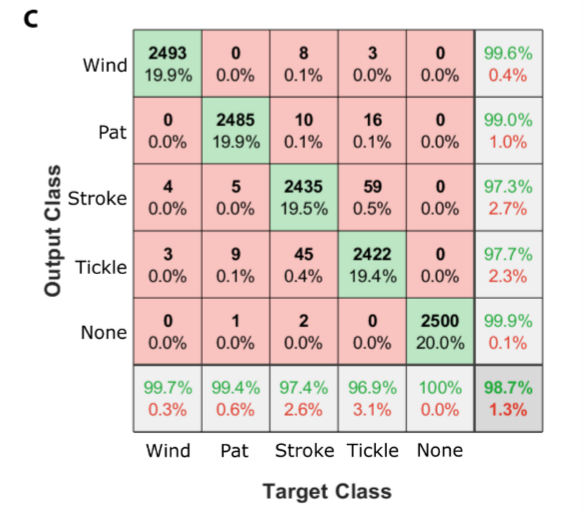
矩阵行代表实际触觉模式,列代表预测结果,数值表示分类准确率。结果显示,对轻拍、挠痒、抚摸、风吹及无接触(None)五种情况的总体分类准确率达 98.7%,仅有极少样本被误分类(如个别 “挠痒” 被误判为 “轻拍”),证明该方法能稳定区分不同触觉模式。
五、可修复性
通过受损、修复及功能恢复的过程,展示了仿生机器人皮肤在遭受损伤后的结构与功能修复能力,具体如下:
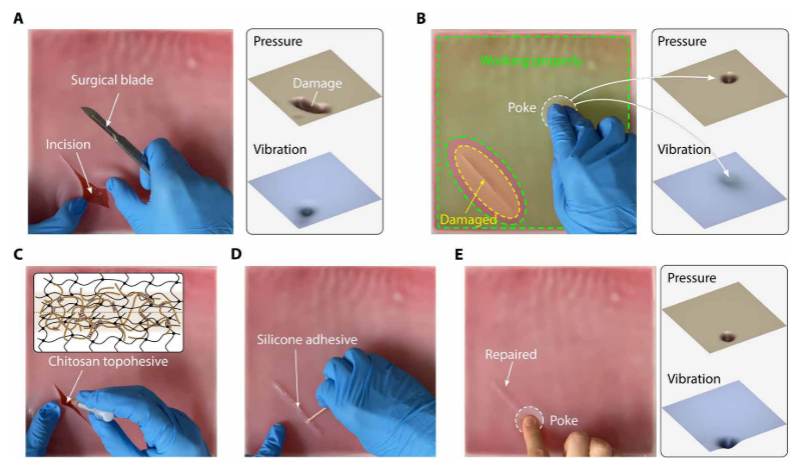
图 5A:损伤状态
机器人皮肤被手术刀片切割后,切口导致局部电连接中断,通过电阻抗断层扫描(EIT)可观察到该区域无法检测到压力信号,说明触觉传感功能局部丧失。
图 5B:损伤后的局部功能保留
尽管受损区域失去触觉传感能力,但损伤周围的外围区域仍能正常工作,可检测压力和振动信号,体现了该设计对局部损伤的鲁棒性。
图 5C-D:修复过程
对水凝胶层,使用壳聚糖拓扑粘合剂填充切口,通过 pH 响应性技术实现聚合物网络的交联,使水凝胶切面重新结合(图 5C);
对弹性体皮肤,使用商用硅酮粘合剂(室温硫化橡胶)固定,恢复外层结构完整性(图 5D)。
图 5E:修复后的功能恢复
修复后,机器人皮肤在受损区域重新建立稳定的电连接和机械性能,可正常检测压力和振动,重建图像中无伪影,且在 20 N 外力下仍能保持稳定(图 5E),证明结构和功能完全恢复。
六、传感器化假肢的应用
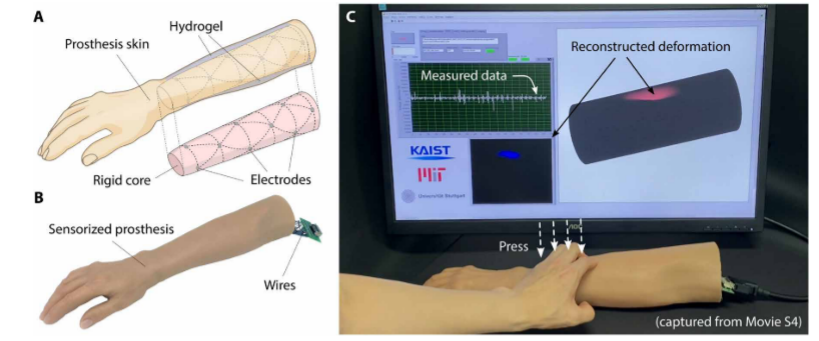
图 6A:传感器化假肢结构
假肢由弹性体皮肤(美容假肢外壳)、刚性核心及填充两者间隙的坚韧水凝胶组成。刚性核心内置金属电极,通过 EIT 技术实现压力传感,水凝胶层作为压力敏感介质传递变形信号。
图 6B:假肢实物与布线
展示了集成机器人皮肤的假肢外观,刚性核心内部的空间可容纳电机系统,说明该设计易于与现有假肢结构集成。
图 6C:假肢的触觉传感效果
通过 EIT 重建算法,假肢能实时检测表面压力的位置和强度,例如按压假肢表面时,重建的变形图可准确反映压力分布,证明其在假肢上实现触觉传感的可行性,为截肢者提供触觉反馈奠定基础。