无人机吊舱与遥控器匹配技术解析
一、 无人机吊舱如何与遥控器“对上暗号”?
在无人机执行物资投送、电力巡检、灾害搜救等任务时,吊舱(即悬挂于机身下方的任务设备)常成为核心作业单元。但要让遥控器“指挥”吊舱,两者必须实现双向通信协议互通、电气接口兼容、控制逻辑同步,否则指令无法传达,吊舱如同“失聪”。吊舱与遥控器的匹配绝非简单物理连接,而是涉及多层次的技术耦合
二、 匹配的核心技术维度
1. 通信协议:吊舱与遥控器的“共同语言”
遥控器与吊舱的指令传输依赖标准化协议。目前主流协议包括:
PSDK协议:专为负载设备开发的协议,支持个别机型直接接入吊舱,实现遥控器按钮映射、参数回传。
SBUS信号:一种串行总线协议,常用于独立遥控器或第三方飞控。例如天途吊舱增程模块通过SBUS传输操控指令,控制距离可扩展至5公里。
定制串口协议:工业吊舱常用422/RS-232接口,需设定固定波特率(如115200bps)和校验规则。若协议不匹配,指令会解析错误。
2. 电气接口:电力与信号的物理通道
供电匹配:吊舱工作电压需与无人机电源输出匹配。例如MS120吊舱采用24V供电,若挂载于12V无人机则无法启动。
接口兼容:控制信号接口类型(如PWM、S.BUS、串口)必须一致。部分吊舱支持多种接口,可通过跳线切换。
3. 控制参数:动作范围的精确同步
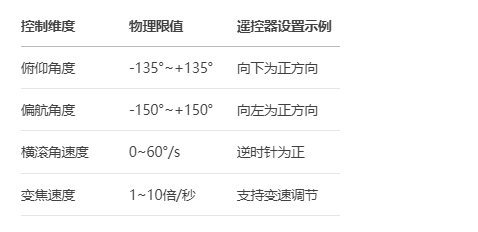
遥控器需预设吊舱的运动参数限值,避免超限损坏:
角度范围:俯仰(-135°~+135°)、偏航(-150°~+150°)等物理极限需写入遥控器固件。
角速度控制:遥控器发送角速度指令(单位°/s)时,需与吊舱电机响应能力匹配。
表:典型吊舱控制参数范围
4. 软件集成:驱动与SDK的桥梁
遥控器固件支持:需集成吊舱的驱动代码。。
地面站软件扩展:如SpireCV SDK提供吊舱控制API,开发者可编程实现目标跟踪、自动变焦。
三、 如何判断是否匹配?五大关键条件
1. 协议握手成功
吊舱上电后与遥控器进行协议握手。若协议兼容(如均支持PSDK),遥控器界面显示吊舱状态(如温度、焦距);若失败则报“未检测到负载”。
2. 控制指令无冲突
遥控器摇杆动作需精确映射为吊舱运动。例如:
俯仰摇杆前推 → 吊舱向下旋转(pitch值增大)
冲突时可能出现镜头反向运动。
3. 视频/数据流稳定传输
吊舱视频需实时回传至遥控器屏幕。常见传输方式包括:
RTSP推流:网口输出H.264/H.265视频流,地面站通过IP地址接收。
图传融合:吊舱图像经无人机图传系统中转,需编码格式匹配。
4. 供电与功耗适配
吊舱功耗需低于无人机供电能力。例如:
MS120吊舱载重15kg时功耗约16W,24V电压下电流≤4.5A。
若超负荷,遥控器触发“电压异常”告警。
5. 紧急功能联动
安全机制需全链路贯通:
遥控器“一键断绳”指令 → 吊舱熔断模块3秒响应。
跟踪丢失时吊舱自动归中(`setHome()`函数)。
四、 前沿趋势:智能化与标准化
协议统一化
如北约吊舱项目推动MQ-9无人机吊舱接口标准化,集成电源、导航、数据链于一体,降低匹配复杂度。
AI赋能控制
SpireCV等库结合深度学习,实现吊舱自动锁定目标(如电力巡检中的故障点),遥控器仅需监控。
超距增程技术
中继模块将S.Bus信号与数传电台捆绑,使控制距离突破10公里,解决图传/遥控距离不匹配问题。
知识扩展:吊舱增程原理
传统遥控器距离仅1公里,但无人机数传可达10公里以上。增程模块将遥控器的S.Bus信号和数传的RS-232信号编码打包,空中端解码后分发给吊舱,实现超视距控制。
