Move AI技术浅析(四):运动跟踪与估计
一、运动跟踪与估计模块概述
运动跟踪与估计 是 Move AI 的核心模块之一,其主要任务是从提取到的关键点特征中,分析和理解运动的动态特性,包括运动轨迹、速度、加速度、方向等。该模块通常包括 时间序列分析 和 运动估计 两个子模块。
- 时间序列分析:分析关键点随时间变化的数据,捕捉运动的动态特性。
- 运动估计:估计运动的参数,如速度、加速度、方向等。
二、时间序列分析详解
2.1 时间序列分析步骤详解
2.1.1 时间序列数据生成
首先,需要将关键点的坐标数据表示为时间序列数据。假设关键点的坐标为 ,则时间序列数据可以表示为:
其中 是时间步长。
2.1.2 时间序列分析方法
时间序列分析方法可以分为以下几类:
1.统计方法:
- 自回归模型(AR):使用过去的值来预测当前值。
- 移动平均模型(MA):使用过去的误差来预测当前值。
- 自回归滑动平均模型(ARMA):结合 AR 和 MA 模型。
2.机器学习方法:
- 递归神经网络(RNN):专门用于处理序列数据的神经网络。
- 长短期记忆网络(LSTM):一种特殊的 RNN,具有记忆单元,可以处理长距离的时间依赖性。
- 门控循环单元(GRU):LSTM 的简化版本,具有更少的参数和更快的训练速度。
3.深度学习方法:
- 时间卷积网络(TCN):基于卷积神经网络(CNN)的时间序列分析模型,具有并行计算的优势。
2.2 时间序列分析模型详解
2.2.1 递归神经网络(RNN)
RNN 是一种专门用于处理序列数据的神经网络。其主要步骤如下:
1.输入序列:将时间序列数据输入到 RNN 中。
2.隐藏状态更新:使用递归公式更新隐藏状态。
3.输出预测:根据隐藏状态进行输出预测。
过程模型:

公式:
-
隐藏状态更新:

其中
是当前隐藏状态,
是当前输入,
是前一个隐藏状态,
,
,
是权重和偏置。
-
输出预测:
其中
是当前输出,
,
是权重和偏置。
2.2.2 长短期记忆网络(LSTM)
LSTM 是一种特殊的 RNN,具有记忆单元,可以处理长距离的时间依赖性。其主要步骤如下:
1.输入门:控制输入信息进入记忆单元。
2.遗忘门:控制记忆单元中信息的遗忘。
3.输出门:控制记忆单元中信息的输出。
4.记忆单元更新:更新记忆单元中的信息。
过程模型:
![]()
公式:
-
输入门:

-
遗忘门:
-
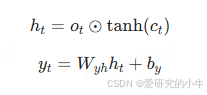
输出门:

-
记忆单元更新:

-
输出预测:
2.2.3 时间卷积网络(TCN)
TCN 是一种基于 CNN 的时间序列分析模型,具有并行计算的优势。其主要步骤如下:
1.因果卷积:使用因果卷积处理时间序列数据。
2.残差连接:使用残差连接解决梯度消失问题。
3.扩张卷积:使用扩张卷积扩大感受野。
过程模型:

公式:
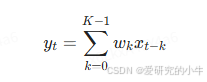
-
因果卷积:
-
扩张卷积:
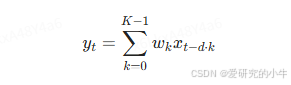
其中
是扩张因子。
三、运动估计详解
3.1 运动估计步骤详解
3.1.1 运动参数估计
运动估计的主要任务是估计运动的参数,如速度、加速度、方向等。以下是常见的运动参数估计方法:
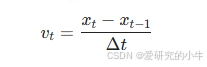
1.速度估计:
- 方法:计算关键点在一段时间内的位移。
- 公式:
2.加速度估计:
- 方法:计算速度的变化率。
- 公式:
3.方向估计:
- 方法:分析关键点的运动轨迹,计算运动方向。
- 公式:
3.2 运动估计模型总结
3.2.1 速度估计模型
3.2.2 加速度估计模型
3.2.3 方向估计模型