基于MATLAB/octave的容积卡尔曼滤波(CKF)【带逐行注释】
介绍
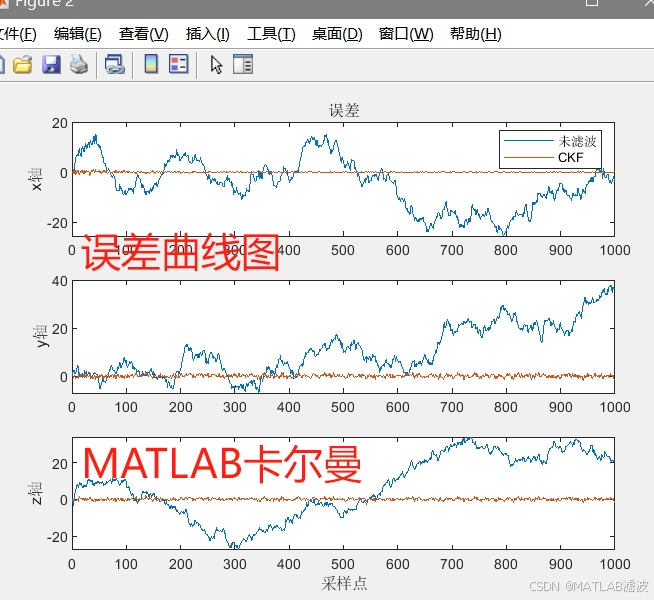
CKF的三维滤波程序例程
产品概述
我们的 MATLAB 数据处理工具是专为科研人员、工程师和数据分析师设计的高效解决方案。该工具提供了一系列强大的功能,能够快速处理和分析大规模数据集,适用于各种科学和工程应用,包括信号处理、图像分析和机器学习等。
产品特点
-
高性能处理:
- 采用优化算法和数据结构,能够高效处理大规模数据,提高计算速度。
-
易于使用:
- 直观的函数接口和丰富的文档,使用户可以快速上手,轻松实现复杂的数据处理任务。
-
灵活的扩展性:
- 可根据用户需求进行定制和扩展,支持多种数据格式的输入和输出。
-
可视化支持:
- 内置绘图功能,用户可以直观地展示数据处理结果,便于分析和报告。
适用场景
- 科研研究:在物理、化学、生物等领域对实验数据进行分析和可视化。
- 工程应用:处理传感器数据、图像数据等,支持实时监测和分析。
- 教育培训:作为教学工具,帮助学生理解数据处理和分析的基本概念
运行结果

代码
% CKF的三维滤波程序例程
% author:Evand
% 2024-08-30/Ver1
clear;clc;close all; %清空工作区、命令行,关闭小窗口
rng(0); %固定随机种子
%% 滤波模型初始化
t = 1:1:1000;% 定义时间序列
Q = 1*diag([1,1,1]);% 设置过程噪声协方差矩阵
w = sqrt(Q)*randn(size(Q,1),length(t)); %生成
% 观测噪声协方差矩阵和观测噪声
R = 1*diag([1,1,1]);
v = sqrt(R)*randn(size(R,1),length(t));
% 初始状态估计协方差矩阵
P0 = 1*eye(3);
% 初始化状态向量
X = zeros(3,length(t)); %给状态真实值申请空间
Z=zeros(3,length(t)); %定义观测值形式(申请空间)
Z(:,1)=[X(1,1)^2/20;X(2,1);X(3,1)]+v(:,1); %观测量
%% 运动模型
X_=zeros(3,length(t)); %给未滤波的状态申请空间
X_(:,1)=X(:,1); %给未滤波的状态赋初值代码获取
哔哩哔哩工房 (bilibili.com)