步进电机(STM32+28BYJ-48)
一、简介
步进电动机(stepping motor)把电脉冲信号变换成角位移以控制转子转动的执行机构。在自动控制装置中作为执行器。每输入一个脉冲信号,步进电动机前进一步,故又称脉冲电动机。步进电动机多用于数字式计算机的外部设备,以及打印机、绘图机和磁盘等装置。
二、工作原理
步进电机通过一系列离散的步进动作来实现旋转。每个电脉冲信号驱动电机转动一个固定的角度,称为步距角。步进电机的控制通常通过一个驱动器(步进驱动器)来完成,该驱动器接受来自控制器的脉冲信号,并将其转换为步进电机的相位信号,从而驱动电机按预定的步进角度转动。
这里以28BYJ-48为例说明其工作原理:

当对步进电机施加一系 列连续不断的控制脉冲时,它可以连续不断的转动。每一个脉冲信号对应步进电机的某一组 或两相绕组的通电状态改变一次,也就对应转子转过一定的角度(一个步距角)。当通电状 态的改变完成一个循环时,转子转过一个齿距。四相步进电机可以在不同的通电方式下运行, 常见的通电方式有单(单相绕组通电)四拍(A-B-C-D-A 循环),双(双相绕组通电)四拍 (AB-BC-CD-DA-AB-循环),八拍(A-AB-B-BC-C-CD-D-DA-A-循环)。 下面为驱动方式四相八拍的通电方式 。
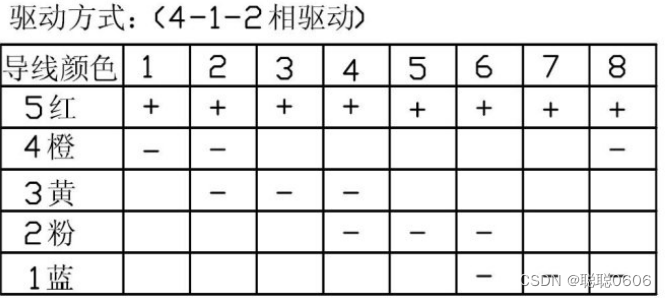
橙色对应的是 A 相,黄色对应的是 B 相,粉色对应的是 C 相,蓝色对应的 是 D 相。
三、原理图
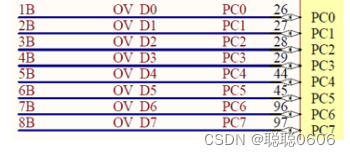
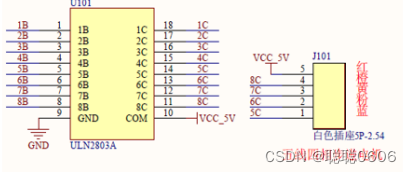
对照原理图,A 相对应 STM32 的 PC7,B 相对应 STM32 的 PC6, C 相对应 STM32 的 PC5,D 相对应 STM32 的 PC4,注意他们都是通过 ULN2803A 来驱动 步进电机的,而 ULN2803A 是反相器。
ULN2803A 的输入为高电平时输出为低电平,输入为低电平时输出为高电平。那如果要 让 A 相通电,由表格可以看出是需要给橙色线低电平的,那么对应的 PC7 应该是高电平, 通过 ULN2803A 反向才能给橙色线低电平,其它的类似。
因此总结一下,使某相通电,则该相对应的 STM32 引脚需要输出高电平;某相不通电,则需要该相对应的 STM32 引脚输出低电平。 并且注意在电机处于停止状态时,所有的相都需要不通电的状态,以免过热烧毁电机!!!
四、代码实现
1.IO口宏定义
#define SM28BYJ48_A SM28BYJ48_A_FUN_OUT(SM28BYJ48_A_PIN_ID) //SM28BYJ48_A
#define SM28BYJ48_B SM28BYJ48_B_FUN_OUT(SM28BYJ48_B_PIN_ID) //SM28BYJ48_B
#define SM28BYJ48_C SM28BYJ48_C_FUN_OUT(SM28BYJ48_C_PIN_ID) //SM28BYJ48_C
#define SM28BYJ48_D SM28BYJ48_D_FUN_OUT(SM28BYJ48_D_PIN_ID) //SM28BYJ48_D2.在步进电机头文件定义一个结构体去设置步进电机的状态,以及步进电机通电导通控 制的宏定义。
/* 定义结构体便于全局变量操作 */
typedef struct
{uint8_t ucSpeed; /* 电机速度 */uint8_t ucDir; /* 电机方向 0 正转, 1 反转 2 停止 */uint8_t ucStop; /* 0 运行, 1 停止 */
}MOTOR_T;
/* 步进电机导通控制定义 */
enum
{SM_OFF = 0, /* A B C D 相均不导通 */SM_A, /* A 相导通 */SM_B, /* B 相导通 */SM_C,SM_D,SM_AB, /* AB 相导通 */SM_BC,SM_CD,SM_DA
};
3.驱动文件要编写的内容
设置一个变量 MOTOR_T g_tMot; /* 定义全局变量 */
注意这个变量在头文件中用 extern 申明一下,以便被其它文件调用
void bsp_InitSM28BYJ48(void)
{设置 GPIO 端口的初始化,设置为推挽输出,特别注意,驱动引脚初始电平是要设置为低电平
}设置一下通电状态
static void motPowerOn(uint8_t _ucMode)
{if (_ucMode == SM_OFF){SM28BYJ48_A = 0;SM28BYJ48_B = 0;SM28BYJ48_C = 0;SM28BYJ48_D = 0;}else if (_ucMode == SM_A){SM28BYJ48_A = 1;SM28BYJ48_B = 0;SM28BYJ48_C = 0;SM28BYJ48_D = 0;}
//还有其它状态,自行补全,总共 9 个状态呢,对应头文件里步进电机导通控制定义
}
4.电机驱动函数
void motPower(uint8_t _mode,uint8_t _stop)
{ if(_stop){motPowerOn(0);}else{if(_mode==0){if(++g_tMot.ucSpeed==9)g_tMot.ucSpeed=1;motPowerOn(g_tMot.ucSpeed);}else if(_mode==1){if(--g_tMot.ucSpeed==1)g_tMot.ucSpeed=9;motPowerOn(g_tMot.ucSpeed);}else if(_mode==2){motPowerOn(0);} }}5.主函数应用
int main(void)
{bsp_InitSM28BYJ48(); /* 电机初始化 */ bsp_StartAutoTimer(1,g_tMot.ucSpeed);while(1){bsp_Idle(); /* CPU 空闲时执行的函数,在 bsp.c */if (bsp_CheckTimer(0)) /* 判断定时器超时时间 */ {/* 每隔 300ms 进来一次 */ bsp_LedToggle(1); /* 翻转 DS0 的状态 */ }if (bsp_CheckTimer(1)) /* 判断定时器超时时间 */ {/* 每隔 300ms 进来一次 */ motPower(g_tMot.ucDir,g_tMot.ucStop); }}
}文中代码只是简单demo,非完整代码,还请读者自行动脑子补全,有问题可随时交流。