零基础STM32单片机编程入门(七)定时器PWM波输出实战含源码视频
文章目录
- 一.概要
- 二.PWM产生框架图
- 三.CubeMX配置一个TIME输出1KHZ,占空比50%PWM波例程
- 1.硬件准备
- 2.创建工程
- 3.测量波形结果
- 四.CubeMX工程源代码下载
- 五.讲解视频链接地址
- 六.小结
一.概要
脉冲宽度调制(PWM),是英文“Pulse Width Modulation”的缩写,简称脉宽调制,是利用单片机数字输出(1或0)来对外部模拟电路进行控制的一种非常有效的技术。

PWM波主要应用场景:
电机控制
PWM信号可以用来控制直流电机的转速和位置,实现对电机的精确控制。在无刷直流电机(BLDC)和步进电机中,利用PWM调制可以充分发挥电子设备的精确度和能效。
LED灯光调光
PWM信号可用于调控LED灯的亮度。通过改变PWM信号的占空比(on-time和off-time的比值),可以实现对LED灯光的调光操作,达到节能和避免眩光的效果。
电源管理
采用PWM技术的开关稳压器(如降压转换器)在电源管理中具有广泛的应用。
音频放大器
在数字音频放大器中,PWM信号用于控制音频信号的放大和调制。
混合动力电动汽车(HEV)和电动汽车(EV)
PWM信号用于控制电池充放电和电动机的驱动管理,提高电池的使用性能和寿命。
伺服系统
在伺服系统中,PWM信号用于传输伺服电机的控制信号,实现对伺服电机的精确控制。
二.PWM产生框架图
定时器部分框图如下,其中PWM相关的主要是基本定时器和PWM输出控制部分,基本定时器主要控制PWM输出的频率,PWM控制部分主要控制PWM输出的占空比。

PWM输出控制部分信号流向

主要寄存器
1.TIMx_CCR1
捕获比较(值)寄存器(x=1,2,3,4):设置比较值。
2.TIMx_CNT
计数器值与捕获比较寄存器CCR1进行比较,通过比较结果输出有效电平和无效电平 。
3.TIMx_ARR
自动重装载寄存器,计数器(TIMx_CNT)开始计数,直到计数器(TIMx_CNT)达到TIMx_ARR中存放的值后,重新回到0,依次循环 。
在PWM工作模式下,引入一个寄存器CCRx,这个寄存器用于控制PWM输出波的有效电平长度(占空比),假定定时器工作在向上计数 PWM模式,且当 CNT<CCRx 时,输出 0,当 CNT>=CCRx 时输出 1。当 CNT 达到 ARR 值的时候,重新归零,然后重新向上计数,依次循环。改变 CCRx 的值,就可以改变 PWM 输出的占空比,改变 ARR 的值,就可以改变 PWM 输出的频率。
工作过程如下图所示

三.CubeMX配置一个TIME输出1KHZ,占空比50%PWM波例程
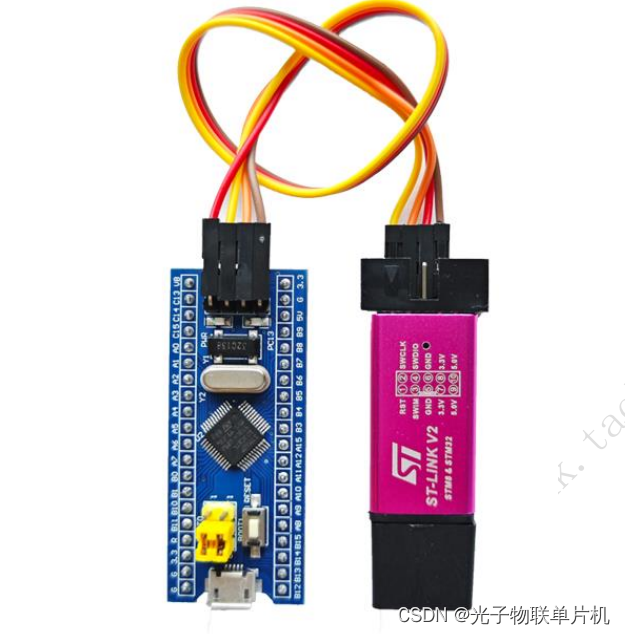
1.硬件准备
STLINK接STM32F103C8T6小系统板,STLINK接电脑USB口。
2.创建工程
打开STM32CubeMX软件,新建工程

Part Number处输入STM32F103C8,再双击就创建新的工程

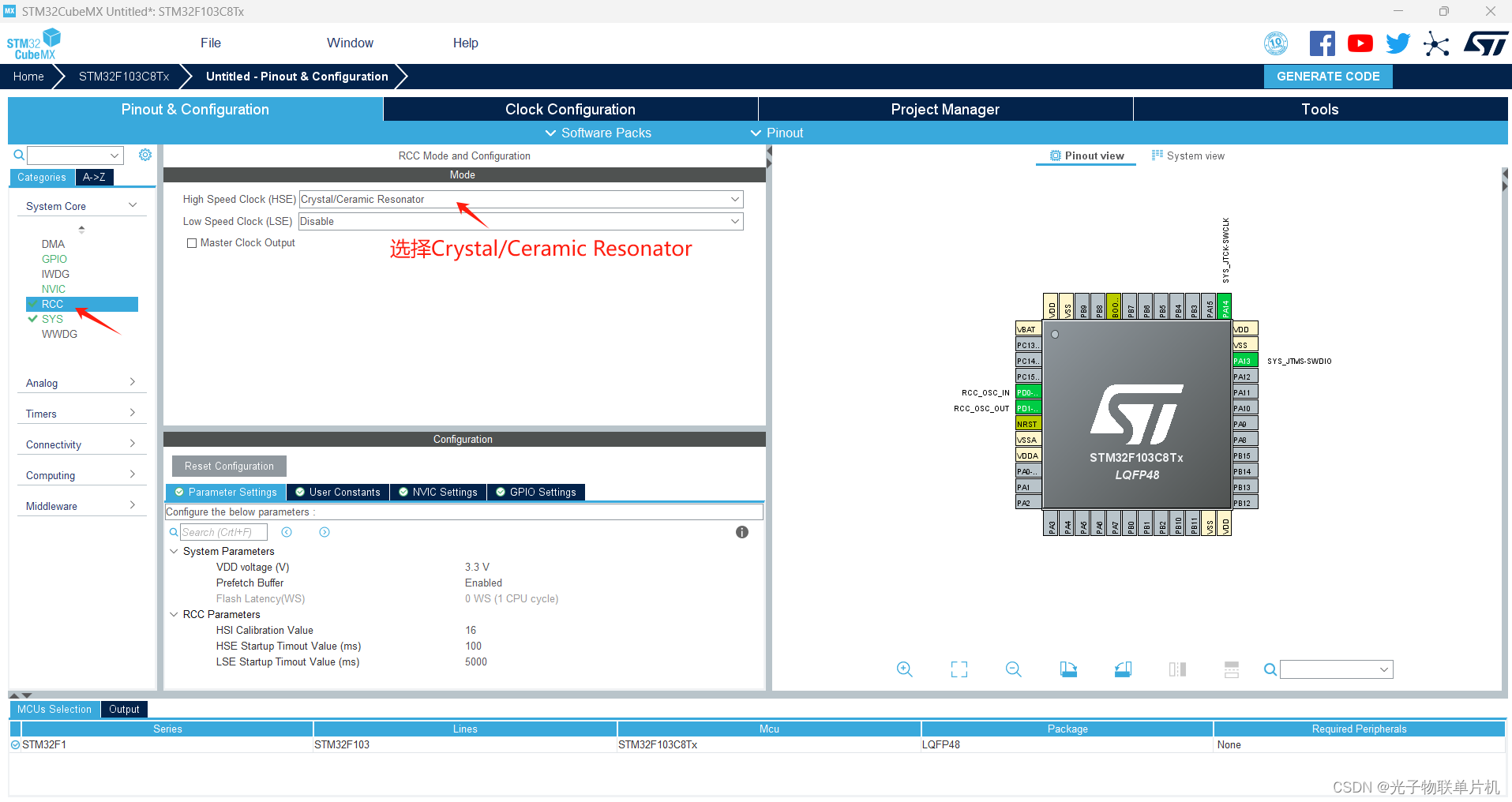
配置下载口引脚

配置外部晶振引脚
配置系统主频

配置TIM1,1ms定时器,TIM1内部时钟是72MHZ,72分频就是1MHZ,计数1000次归零,计数时间就是1ms,脉冲宽度是500us,根据上述配置,PWM波频率就是1KHZ,占空比就是50%。

配置工程文件名,保存路径,KEIL5工程输出方式

生成工程

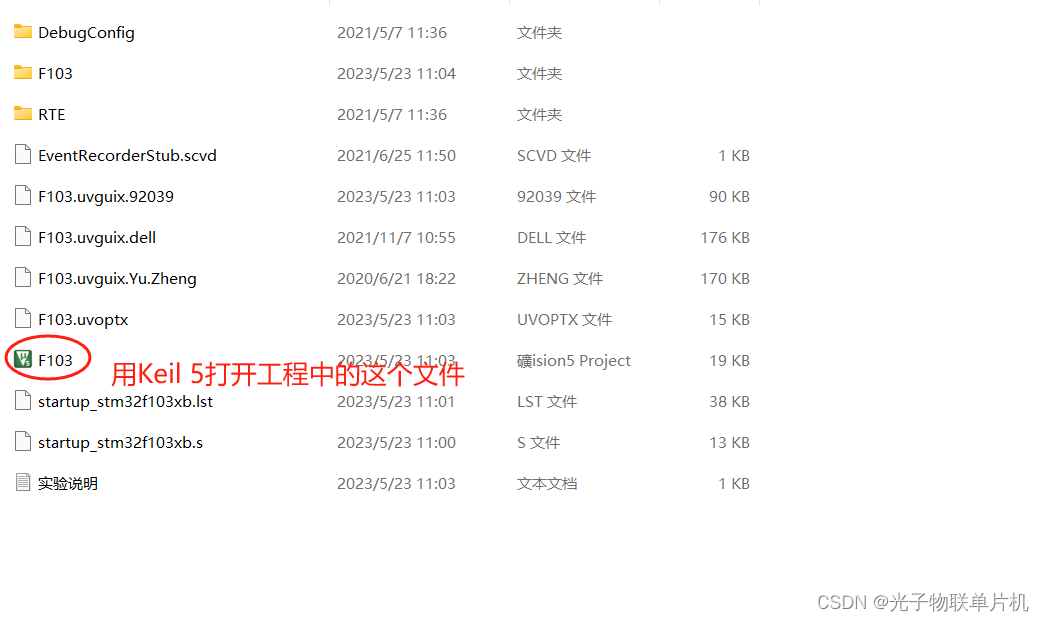
用Keil5打开工程
增加代码

主要代码如下
int main(void)
{/* USER CODE BEGIN 1 *//* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_TIM1_Init();/* USER CODE BEGIN 2 */if (HAL_TIM_PWM_Start(&htim1, TIM_CHANNEL_1) != HAL_OK)//启动定时器通道1,PWM输出{/* PWM generation Error */while(1);}/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}/* USER CODE END 3 */
}void MX_TIM1_Init(void)
{TIM_ClockConfigTypeDef sClockSourceConfig = {0};TIM_MasterConfigTypeDef sMasterConfig = {0};TIM_OC_InitTypeDef sConfigOC = {0};TIM_BreakDeadTimeConfigTypeDef sBreakDeadTimeConfig = {0};htim1.Instance = TIM1;htim1.Init.Prescaler = 71;htim1.Init.CounterMode = TIM_COUNTERMODE_UP;htim1.Init.Period = 999;htim1.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;htim1.Init.RepetitionCounter = 0;htim1.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;if (HAL_TIM_Base_Init(&htim1) != HAL_OK){}sClockSourceConfig.ClockSource = TIM_CLOCKSOURCE_INTERNAL;if (HAL_TIM_ConfigClockSource(&htim1, &sClockSourceConfig) != HAL_OK){}if (HAL_TIM_PWM_Init(&htim1) != HAL_OK){}sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET;sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE;if (HAL_TIMEx_MasterConfigSynchronization(&htim1, &sMasterConfig) != HAL_OK){}sConfigOC.OCMode = TIM_OCMODE_PWM1;sConfigOC.Pulse = 500;sConfigOC.OCPolarity = TIM_OCPOLARITY_HIGH;sConfigOC.OCNPolarity = TIM_OCNPOLARITY_HIGH;sConfigOC.OCFastMode = TIM_OCFAST_DISABLE;sConfigOC.OCIdleState = TIM_OCIDLESTATE_RESET;sConfigOC.OCNIdleState = TIM_OCNIDLESTATE_RESET;if (HAL_TIM_PWM_ConfigChannel(&htim1, &sConfigOC, TIM_CHANNEL_1) != HAL_OK){}sBreakDeadTimeConfig.OffStateRunMode = TIM_OSSR_DISABLE;sBreakDeadTimeConfig.OffStateIDLEMode = TIM_OSSI_DISABLE;sBreakDeadTimeConfig.LockLevel = TIM_LOCKLEVEL_OFF;sBreakDeadTimeConfig.DeadTime = 0;sBreakDeadTimeConfig.BreakState = TIM_BREAK_DISABLE;sBreakDeadTimeConfig.BreakPolarity = TIM_BREAKPOLARITY_HIGH;sBreakDeadTimeConfig.AutomaticOutput = TIM_AUTOMATICOUTPUT_DISABLE;if (HAL_TIMEx_ConfigBreakDeadTime(&htim1, &sBreakDeadTimeConfig) != HAL_OK){}HAL_TIM_MspPostInit(&htim1);}3.测量波形结果
通过波形接收器测量PA8引脚

四.CubeMX工程源代码下载
链接:https://pan.baidu.com/s/1ZOkxY7d7Gz1jXCvHHzF6uA
提取码:bhf6
如果链接失效,可以联系博主给最新链接
程序下载下来之后解压就行
五.讲解视频链接地址
PWM输出实验
六.小结
脉冲宽度调制(PWM:Pulse Width Modulation)可以广泛应用于电机控制、灯光的亮度调节、功率控制等领域,所以在那些领域避免不了需要用到PWM输出技能。