IMU坐标系与自定义坐标系转化
1.首先示例图为例:
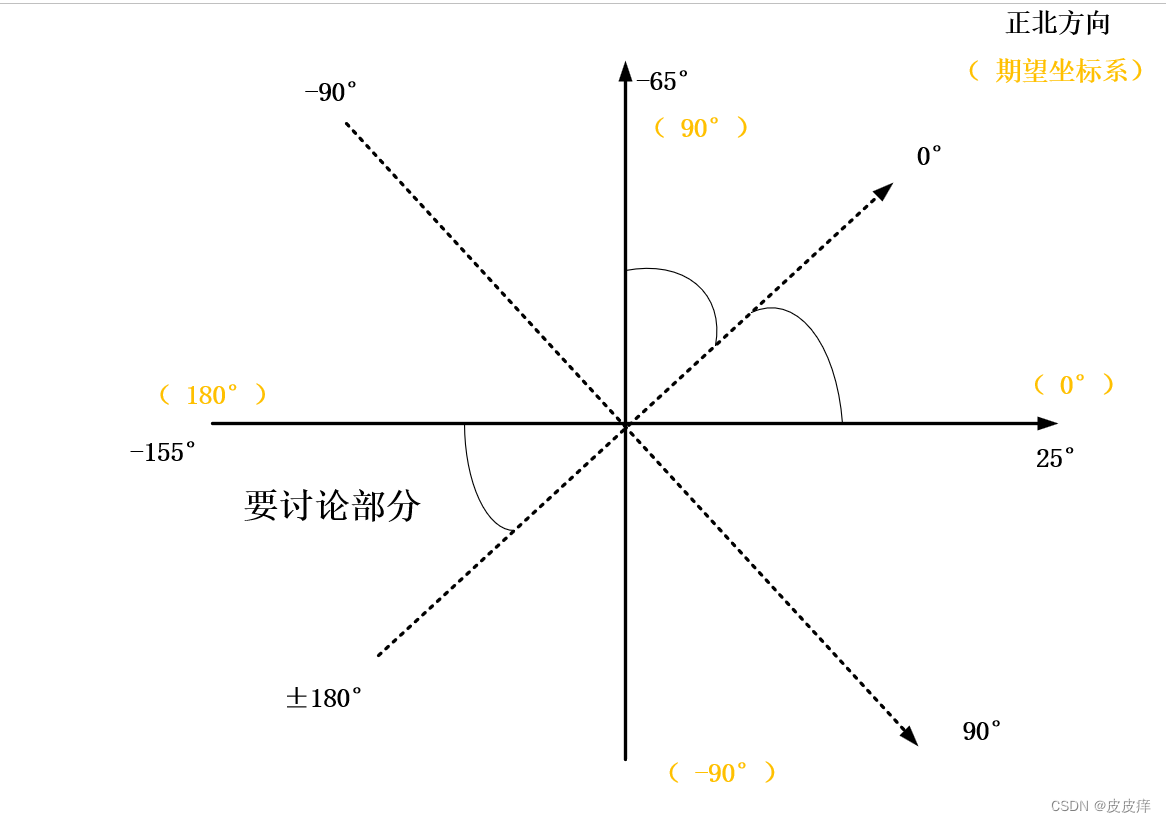
虚线黑色角度为IMU的坐标系;实线为自定义坐标系;
矫正:(默认angleyaw为IMU采的数据角度)
angleyaw_pt = angleyaw-25;if(-180<angleyaw&&angleyaw<-155) // 角度跳变问题(超出180范围){angleyaw_pt=angleyaw_pt+360;}// 看需求转化方向angleyaw_pt=angleyaw_pt+180;if(angleyaw_pt>180) {angleyaw_pt=angleyaw_pt-360;}