动态规划:基本概念
Dynamic Programming
动态规划(Dynamic Programming, DP) 是一种算法设计技巧,通常用来解决具有重叠子问题和最优子结构性质的问题。它通过将问题分解为更小的子问题,逐步解决这些子问题并将结果存储起来,以避免重复计算,从而提高效率。
1. 特点
1.1 重叠子问题
在许多递归问题中,计算过程中会多次遇到相同的子问题。如果我们每次遇到这些子问题时都重新计算,会导致大量的重复计算和效率低下。重叠子问题的思想是通过将子问题的结果存储起来,避免重复计算,从而提高效率。
举例
斐波那契数列
递归关系式
T ( n ) = T ( n − 1 ) + T ( n − 2 ) T(n)=T(n-1)+T(n-2) T(n)=T(n−1)+T(n−2)
计算T(3)
T ( 3 ) = T ( 2 ) + T ( 1 ) = T ( 1 ) + T ( 0 ) + T ( 1 ) \begin{aligned} T(3) &= T(2) + T(1) \\ &= T(1) + T(0) + T(1) \end{aligned} T(3)=T(2)+T(1)=T(1)+T(0)+T(1)
这里我们可以看见T(1)被多次计算
这个多次计算的T(1)便被称为重复子问题
如果我们用递归来解决这个问题
int fin(int n){if(n==1)return 1;if(n==0)return 0;return fin(n-1)+fin(n-2);
}
画出递归树
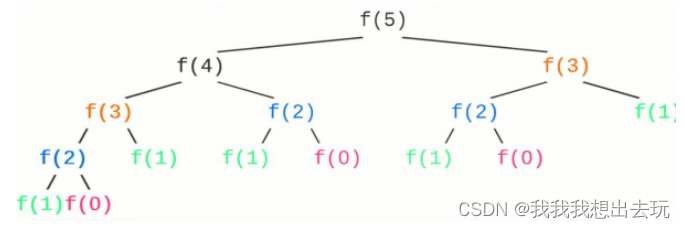
我们可以看到有多次递归调用都是重复的,即出现了重复子问题。
1.2 记忆化存储
继续探究斐波那契问题
我们之前发现使用递归解决问题时出现了多次递归调用是重复的
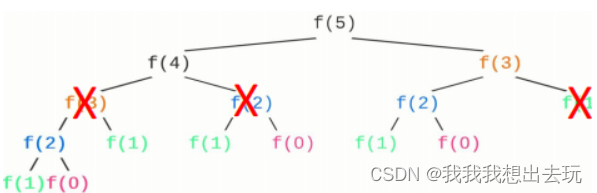
我们可以将这些重复子问题的结果储存起来,这样下一次需要解决这个子问题的时候,只需要访问之前的结果就可以了。
模拟实现
int fin(int n){std::vector<int>Fin(n+1);Fin[0]=0;Fin[1]=1;for(int i=2;i<=n;i++){Fin[i]=Fin[i-1]+Fin[i-2];}return Fin[n];
}
可以看出来我们是从最小子问题来逐渐递推至最后的答案,这也被称为自底而上的算法
1.4 状态转移方程
我们来看斐波那契数列的递推关系式
T ( n ) = T ( n − 1 ) + T ( n − 2 ) T(n)=T(n-1)+T(n-2) T(n)=T(n−1)+T(n−2)
这里我们可以看出,如果我们想得到第n项的答案,我们就要知道第n-1项和第n-2项的答案
T ( n ) ← 这个第 n 项的答案,就定义为一个状态 T(n) \gets 这个第n项的答案,就定义为一个状态 T(n)←这个第n项的答案,就定义为一个状态
状态转移方程表示的就是某一个状态和其他状态之间的关系
T ( n ) = T ( n − 1 ) + T ( n − 2 ) T(n)=T(n-1)+T(n-2) T(n)=T(n−1)+T(n−2)
这个方程就表示第n个状态是由第n-1个状态和第n-2个状态决定
1.5 最优子结构
还是看斐波那契数列
我们如果要求出第n个状态的状态值,那么我们一定是使用第n-1个状态和第n-2个状态的值来计算的。
由于我们的状态转移方程是确定的,这里求出的一定是最优解。
给出定义
如果一个问题的最优解包含了其子问题的最优解,则称这个问题具有最优子结构性质。
2. 用动态规划来设计算法的步骤
2.1 理解问题并确定子问题
首先,理解斐波那契数列的问题。斐波那契数列定义如下:
F ( n ) = F ( n − 1 ) + F ( n − 2 ) F(n) = F(n-1) + F(n-2) F(n)=F(n−1)+F(n−2)
其初始条件为:
F ( 0 ) = 0 F(0) = 0 F(0)=0
F ( 1 ) = 1 F(1) = 1 F(1)=1
这个问题可以分解为子问题,即计算第 ( n ) 项的值依赖于第 ( n-1 ) 项和第 ( n-2 ) 项的值。
2.2 定义状态
定义状态 ( dp[i] ) 表示斐波那契数列第 ( i ) 项的值。
d p [ i ] ← 斐波那契数列第 i 项的值 dp[i] \gets 斐波那契数列第 i 项的值 dp[i]←斐波那契数列第i项的值
2.3 确定状态转移方程
状态转移方程基于斐波那契数列的递归定义,可以写作:
d p [ i ] = d p [ i − 1 ] + d p [ i − 2 ] dp[i] = dp[i-1] + dp[i-2] dp[i]=dp[i−1]+dp[i−2]
2.4 确定初始状态和边界
根据斐波那契数列的初始条件,初始化状态:
d p [ 0 ] = 0 dp[0] = 0 dp[0]=0
d p [ 1 ] = 1 dp[1] = 1 dp[1]=1
2.5 利用状态转移方程计算状态值
使用状态转移方程从初始状态开始逐步计算到目标状态值。
#include <vector>int fib(int n) {if (n <= 1) return n;std::vector<int> dp(n + 1);dp[0] = 0;dp[1] = 1;for (int i = 2; i <= n; ++i) {dp[i] = dp[i - 1] + dp[i - 2];}return dp[n];
}