ZED双目相机环境配置

官方资料:stereolabs/zed-python-api: Python API for the ZED SDK (github.com)
1,配置ZED相机环境
1.安装CUDA
查看电脑是否安装CUDA,安装过程可参考以下博文:
如何选择匹配的CUDA版本:https://blog.csdn.net/iamqianrenzhan/article/details/89343601
cuda安装教程+cudnn安装教程:https://blog.csdn.net/sinat_23619409/article/details/84202651
win10下CUDA和CUDNN的安装:https://blog.csdn.net/u010618587/article/details/82940528
2.安装ZED-SDK
下载与电脑操作系统以及CUDA版本对应的SDK,官方下载链接如下:
ZED SDK 3.8 - Download | Stereolabs

选择 <= 自己电脑CUDA版本的SDK

安装SDK成功后,我们进入ZED SDK文件夹中的tools子文件夹,运行ZED Explorer.exe 以及 ZED Depth Viewer.exe,查看ZED相机是否能正常启用工作。
报错:缺少dll,去bin文件夹下,找到dll,复制到tools下
3.安装ZED-Python-API(pyzed)
默认电脑已配置好Python-OpenCV环境,
![]()
pip install cythonpip install numpypip install opencv-python pip install pyopengl
ZED SDK 安装文件夹中有一个 Python 脚本(get_python_api.py),可以自动检测操作系统、CUDA 和 Python 版本并下载相应的预编译 Python API 包(pyzed)。
首先在ZED SDK文件夹中,找到get_python_api.py脚本,并获取其路径信息,最后我是在Anaconda Prompt运行该脚本。在下图中的运行结果可以看到检测出操作系统、CUDA版本等信息,并自动下载与其对应的ZED-Python-API 包。
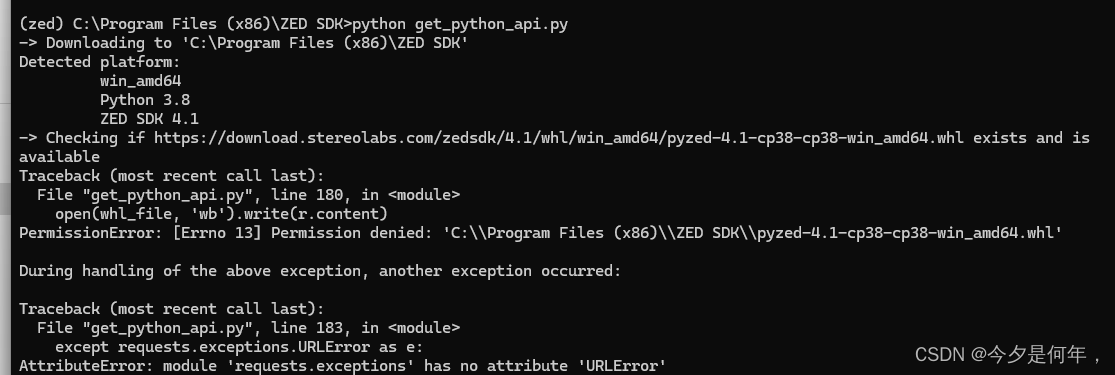
如果遇到ZED-Python-API 包下载不下来,或者报错的情况。我们可以复制运行结果中的下载链接(如:上图中对应的API下载链接是 https://download.stereolabs.com/zedsdk/4.1/whl/win_amd64/pyzed-4.1-cp38-cp38-win_amd64.whl),在浏览器上直接访问,即可下载。
下载得到ZED-Python-API 包,也就是pyzed的.whl文件,将pyzed.whl文件放入ZED SDK 文件夹。

然后在Anaconda Prompt 输入 pip install 命令,对pyzed.whl文件进行安装,这样我们就完成了对ZED相机的Win11-Python开发环境配置。
![]()
进入bin文件夹下,将所有dll文件复制到E:\Anaconda3\envs\zed\Lib\site-packages\pyzed下
4、Hello ZED(Python)
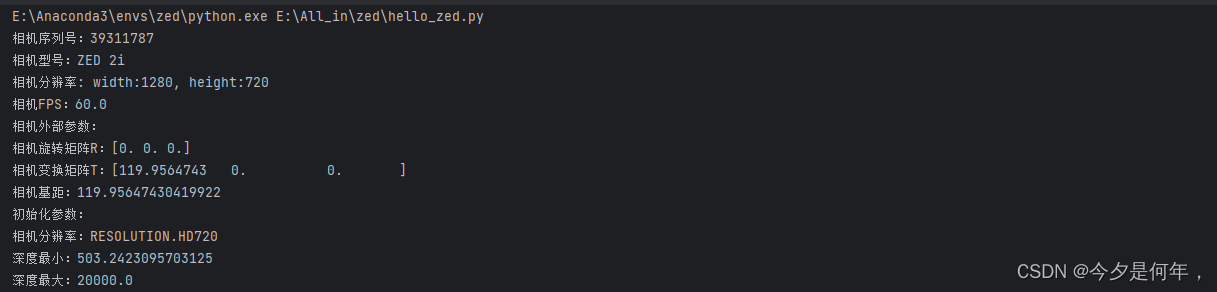
配置好 ZED 的 Python 开发环境后,我们可以进行一个简单的教程案例来实现调用ZED的Python API。
在本例中,我们简单地检索ZED相机的序列号:打开 ZED相机,然后打印其序列号,然后关闭相机。
import pyzed.sl as sldef main():# Create a Camera objectzed = sl.Camera()# Create a InitParameters object and set configuration parametersinit_params = sl.InitParameters()init_params.sdk_verbose = False# Open the cameraerr = zed.open(init_params)if err != sl.ERROR_CODE.SUCCESS:exit(1)# Get camera information (ZED serial number)zed_serial = zed.get_camera_information().serial_numberprint("Hello! This is my serial number: {0}".format(zed_serial))# Close the camerazed.close()if __name__ == "__main__":main()
5,image_capture.py
import pyzed.sl as sl
import cv2
import os
import numpy as np
# 2. 捕获图像
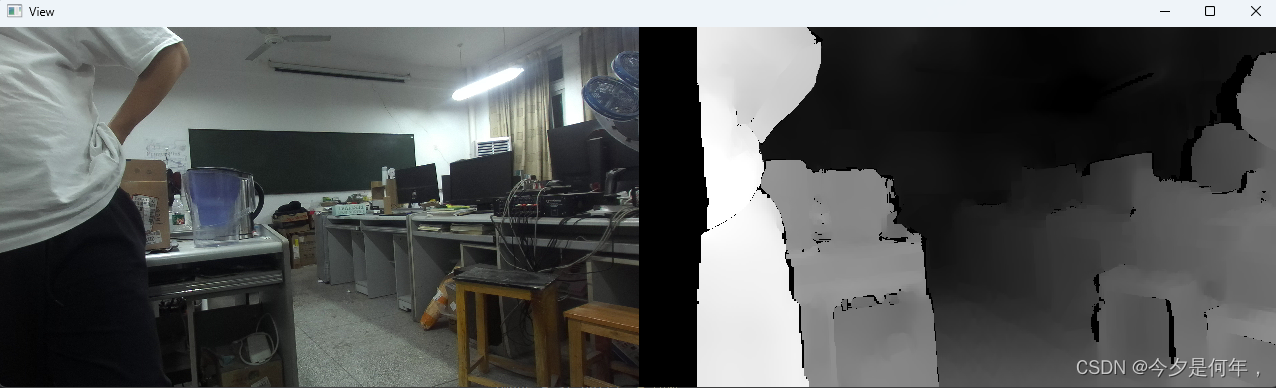
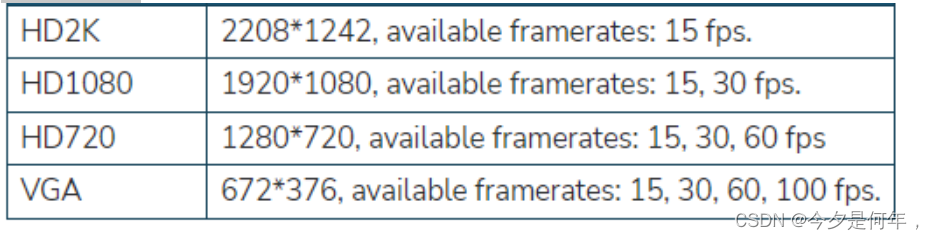
def image_capture():zed = sl.Camera()# 设置相机的分辨率1080和采集帧率30fpsinit_params = sl.InitParameters()init_params.camera_resolution = sl.RESOLUTION.HD1080 # Use HD1080 video modeinit_params.camera_fps = 30 # fps可选:15、30、60、100err = zed.open(init_params) # 根据自定义参数打开相机if err != sl.ERROR_CODE.SUCCESS:exit(1)runtime_parameters = sl.RuntimeParameters() # 设置相机获取参数runtime_parameters.sensing_mode = sl.SENSING_MODE.STANDARDi = 0# 创建sl.Mat对象来存储图像(容器),Mat类可以处理1到4个通道的多种矩阵格式(定义储存图象的类型)image = sl.Mat() # 图像disparity = sl.Mat() # 视差值dep = sl.Mat() # 深度图depth = sl.Mat() # 深度值point_cloud = sl.Mat() # 点云数据# 获取分辨率resolution = zed.get_camera_information().camera_resolutionw, h = resolution.width , resolution.heightx,y = int(w/2),int(h/2) # 中心点while True:# 获取最新的图像,修正它们,并基于提供的RuntimeParameters(深度,点云,跟踪等)计算测量值。if zed.grab(runtime_parameters) == sl.ERROR_CODE.SUCCESS: # 相机成功获取图象# 获取图像timestamp = zed.get_timestamp(sl.TIME_REFERENCE.CURRENT) # 获取图像被捕获时的时间点zed.retrieve_image(image, sl.VIEW.LEFT) # image:容器,sl.VIEW.LEFT:内容img = image.get_data() # 转换成图像数组,便于后续的显示或者储存# 获取视差值zed.retrieve_measure(disparity,sl.MEASURE.DISPARITY,sl.MEM.CPU)dis_map = disparity.get_data()# 获取深度zed.retrieve_measure(depth,sl.MEASURE.DEPTH,sl.MEM.CPU) # 深度值zed.retrieve_image(dep,sl.VIEW.DEPTH) # 深度图depth_map = depth.get_data()dep_map = dep.get_data()# 获取点云zed.retrieve_measure(point_cloud,sl.MEASURE.XYZBGRA,sl.MEM.CPU)point_map = point_cloud.get_data()print('时间点',timestamp.get_seconds(),'中心点视差值',dis_map[x,y],'中心点深度值',depth_map[x,y],'中心点云数据',point_map[x,y])# 利用cv2.imshow显示视图,并对想要的视图进行保存view = np.concatenate((cv2.resize(img,(640,360)),cv2.resize(dep_map,(640,360))),axis=1)cv2.imshow("View", view)key = cv2.waitKey(1)if key & 0xFF == 27: # esc退出breakif key & 0xFF == ord('s'): # 图像保存savePath = os.path.join("./images", "V{:0>3d}.png".format(i)) # 注意根目录是否存在"./images"文件夹cv2.imwrite(savePath, view)i = i + 1zed.close()image_capture()
代码中涉及的可选参数(点击关键字可进入官方文档链接)
分辨率选择
可捕获的视图

计算获得的视图
