【3D reconstruction 学习笔记 第二部】
三维重建 3D reconstruction
- 4. 三维重建与极几何
- 三角化(线性解法)
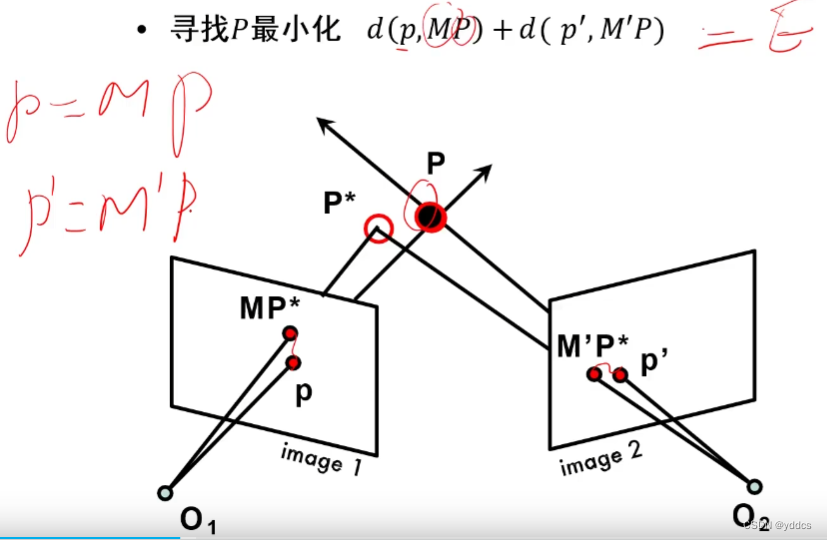
- 三角化(非线性解法)
- 多视图几何
- 极几何
- 极几何约束
- 基础矩阵估计
- 5. 双目立体视觉重建
- 6. 多视图重建
- 7. SFM 系统设计
- 8. SLAM系统设计
4. 三维重建与极几何
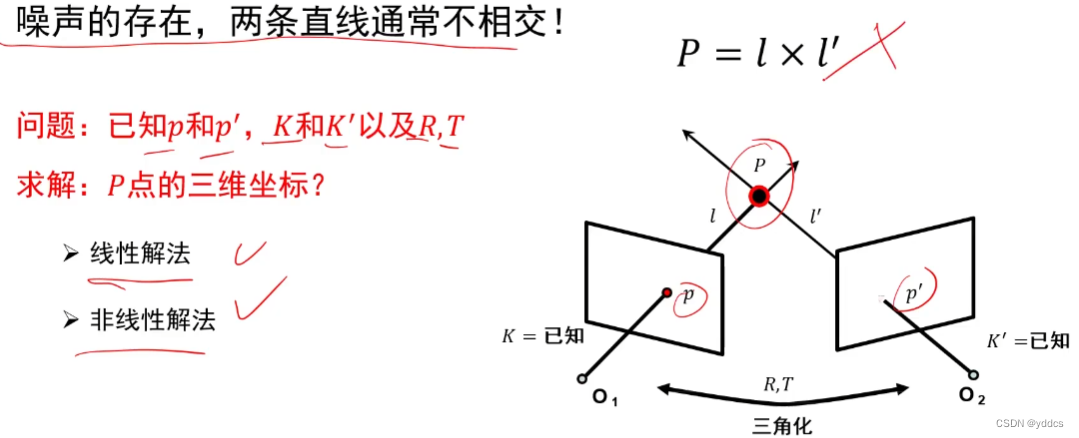
三角化(线性解法)

三角化(非线性解法)
实际应用中 非线性,线性解法都需要 K , K ′ , R , T K,K',R,T K,K′,R,T已知
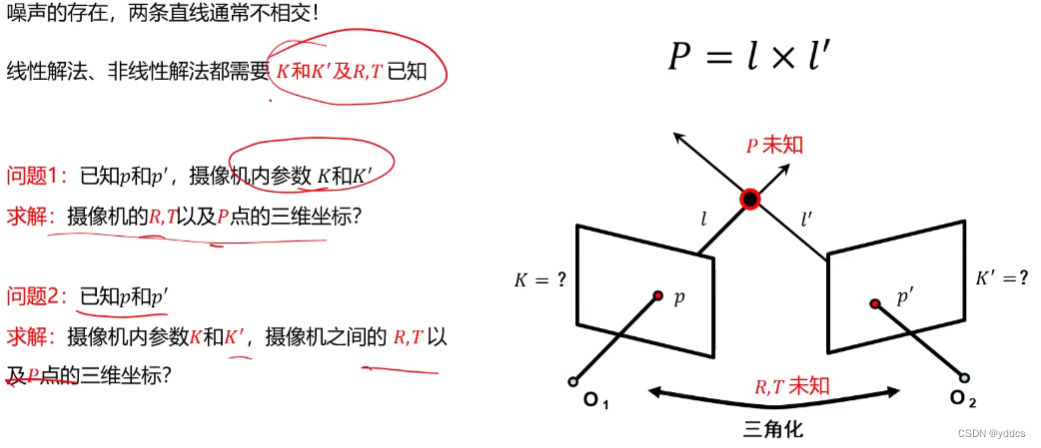
多视图几何
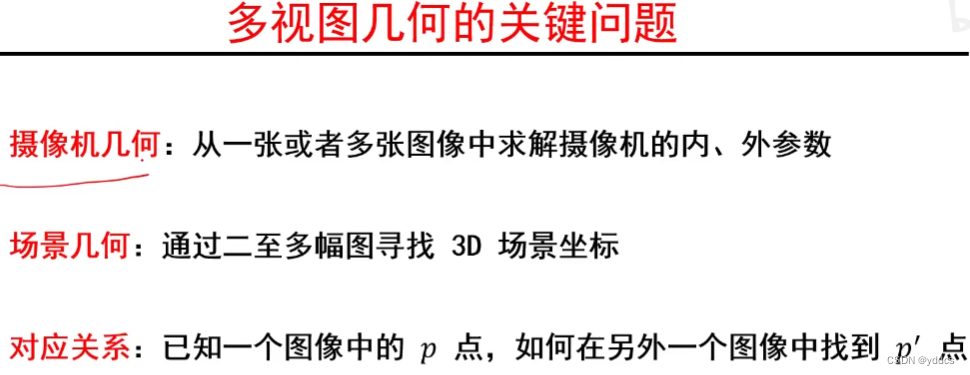
极几何
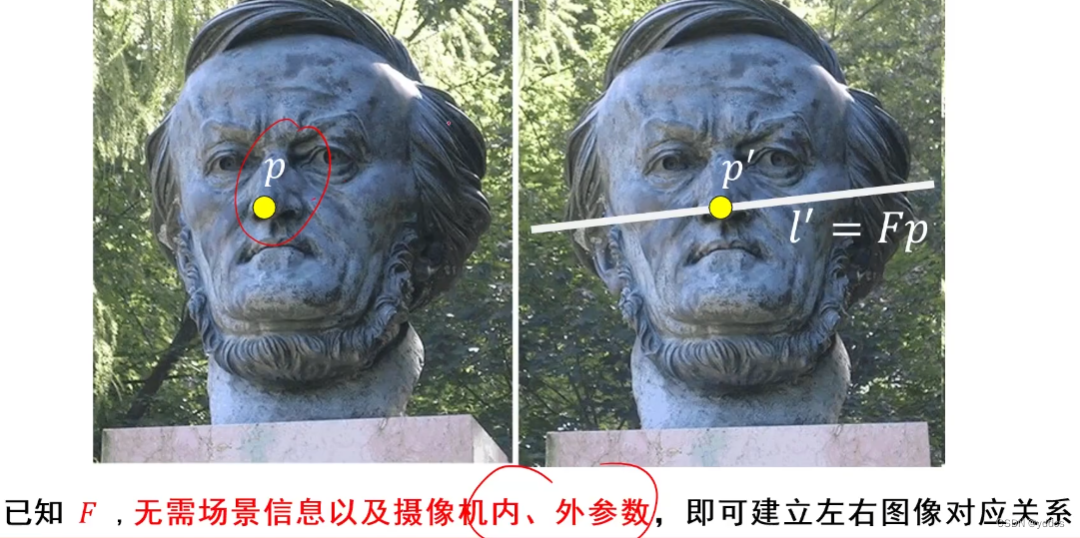
描述了同一场景或物体的两个视点图像间的几何关系
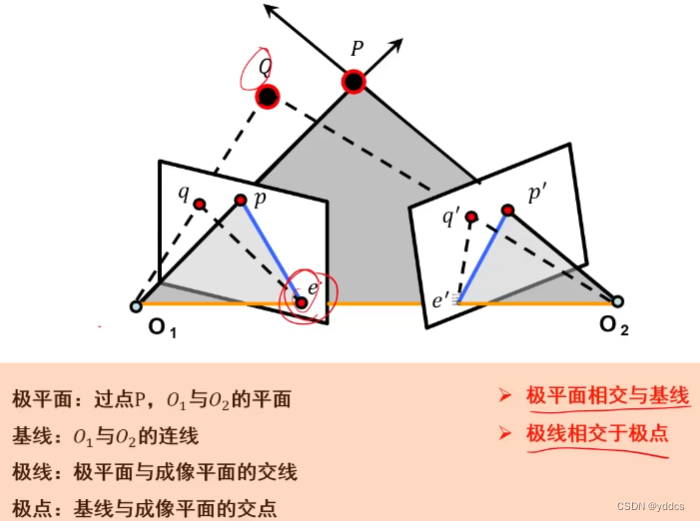
将搜索范围缩小到对应的极线上。
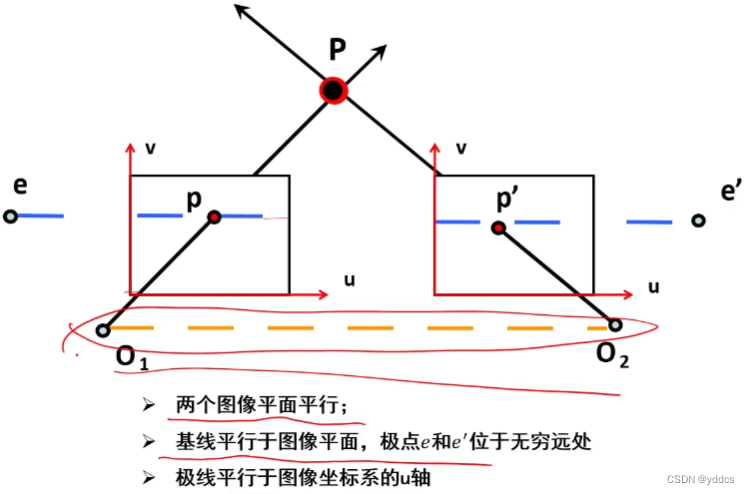
平行视图:
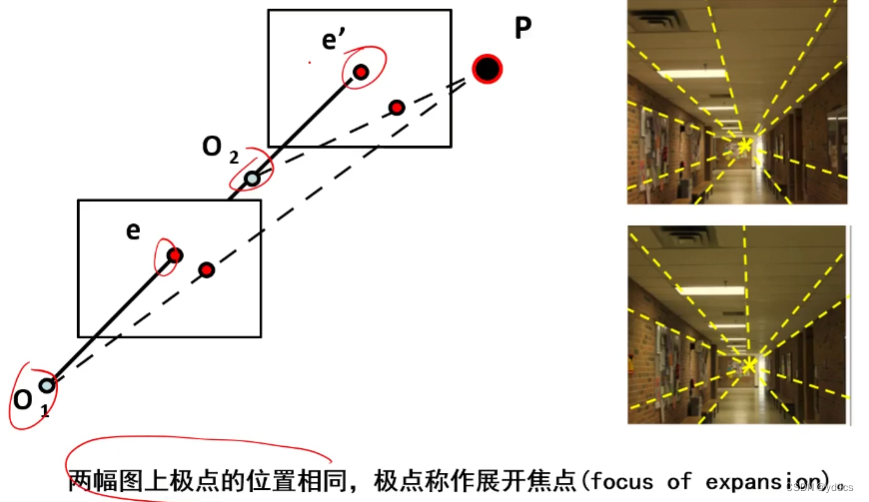
前向平移:
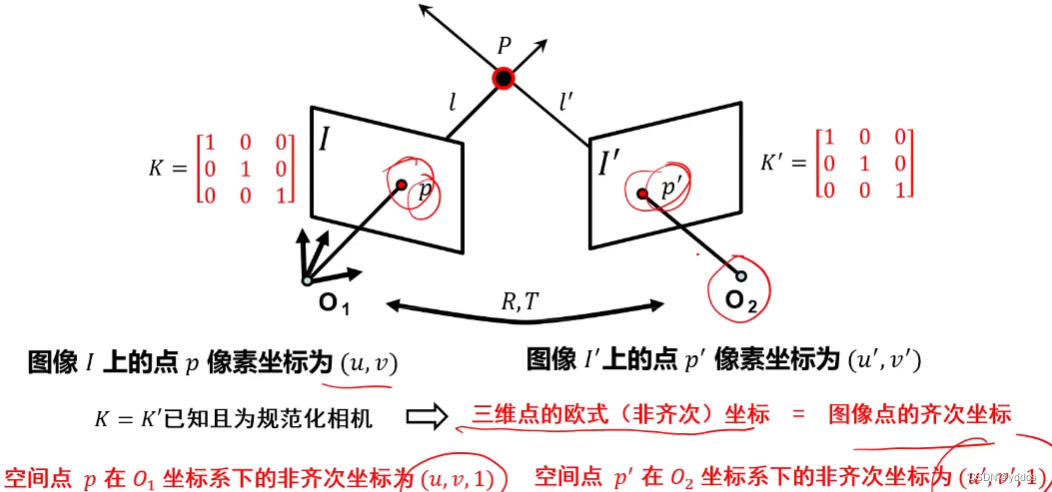
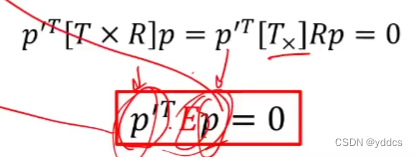
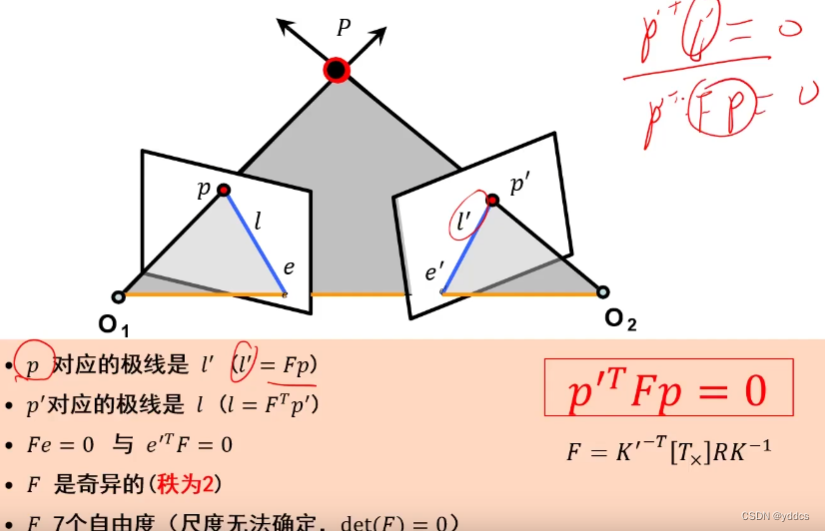
极几何约束
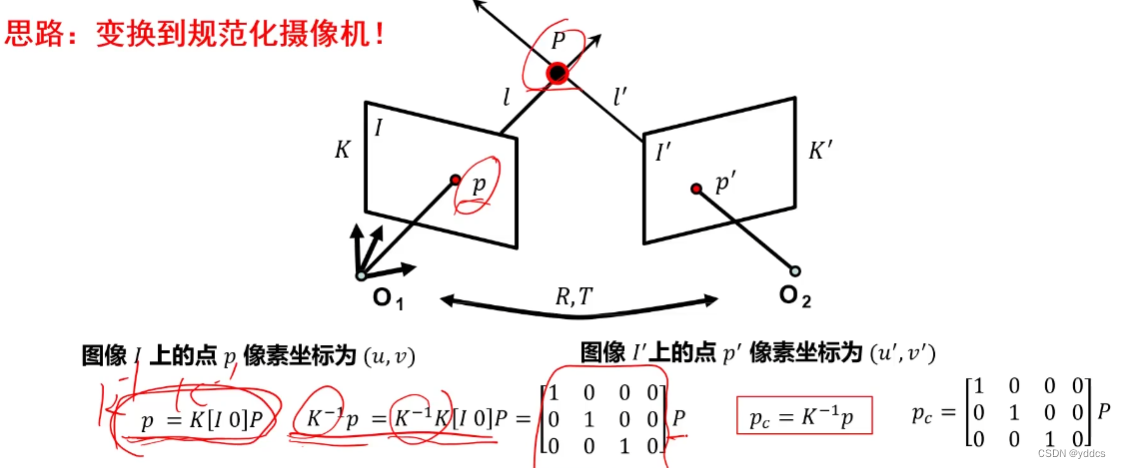
本质矩阵对规范化相机拍摄的两个视点图像间的极几何关系进行代数描述;
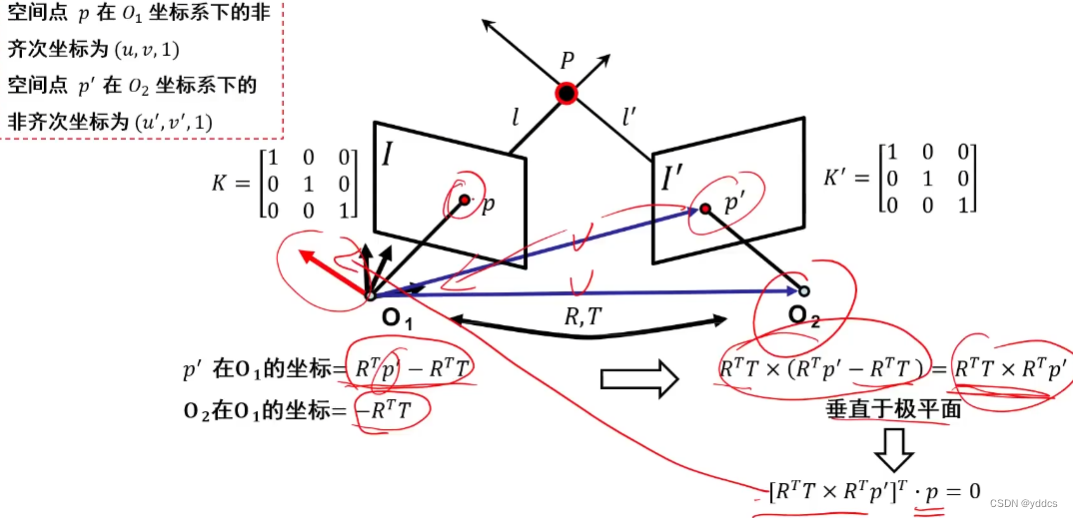
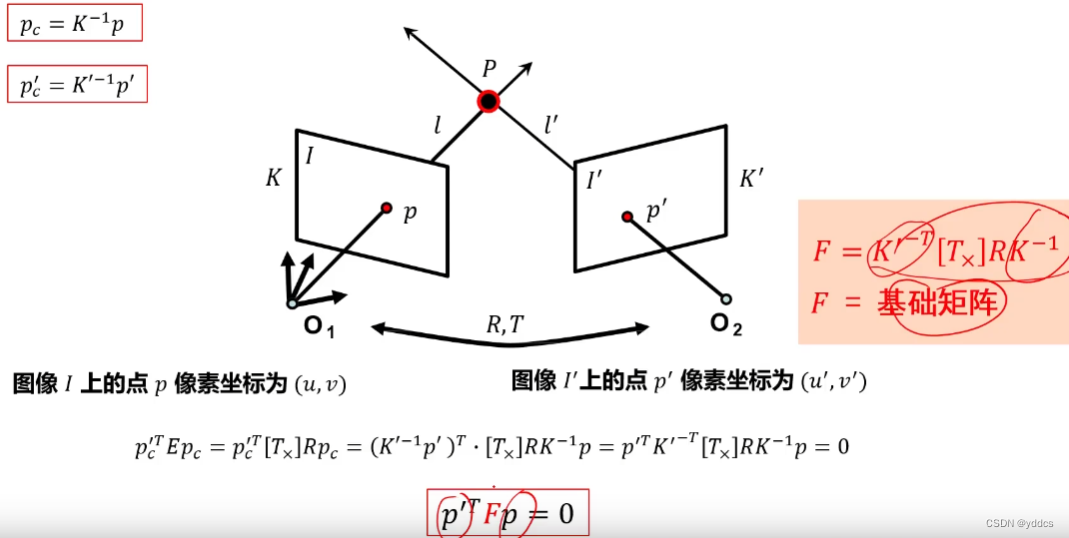
基础矩阵对一般相机拍摄的两个视点的图像间的极几何关系进行代数描述。
基础矩阵估计
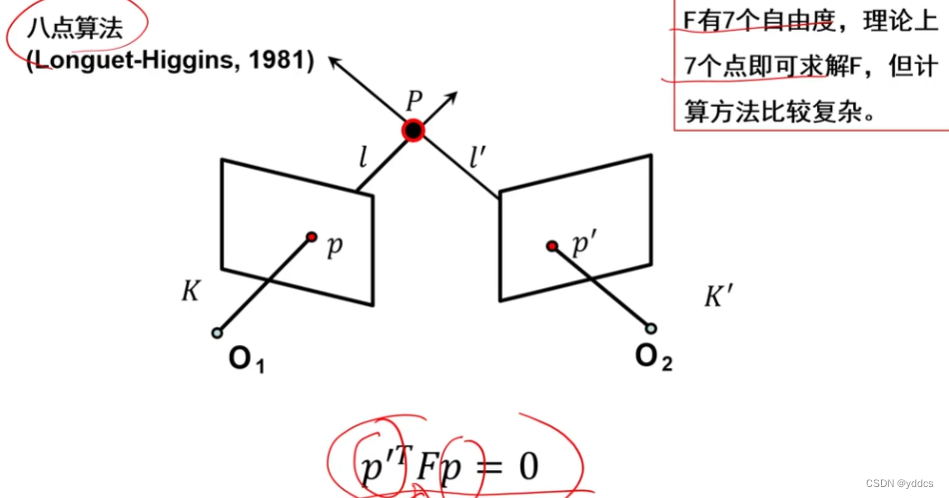
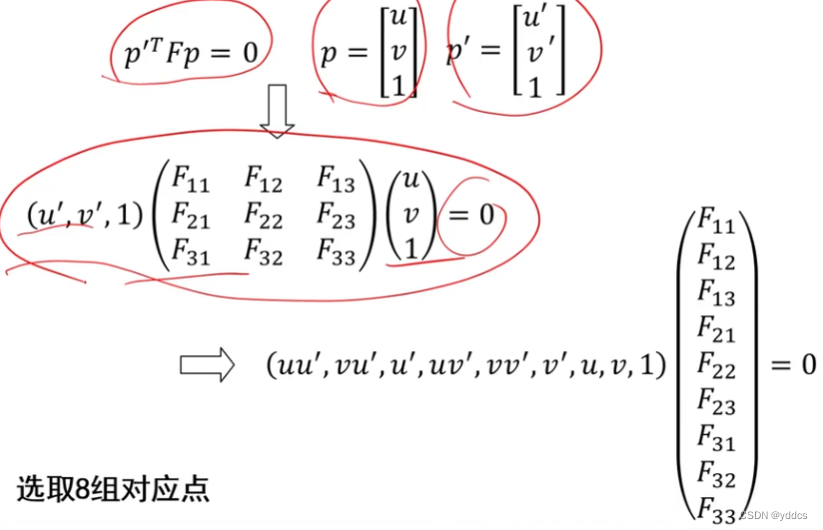
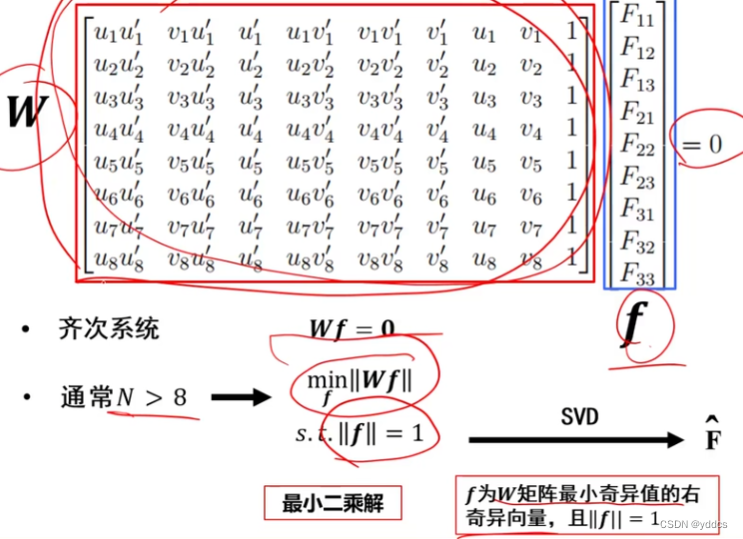
估计出的F不是要求的基础矩阵
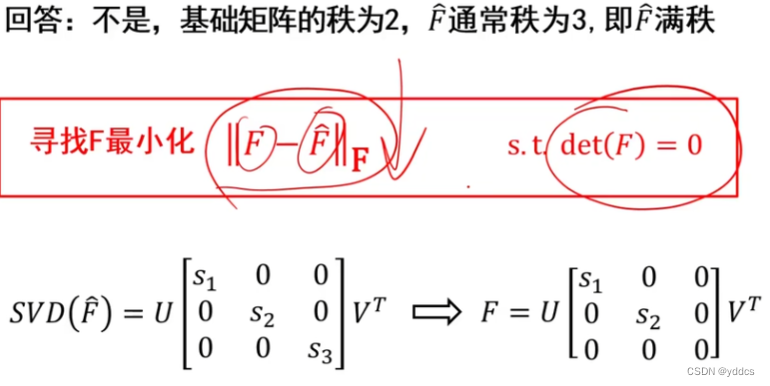
精度低
归一化
5. 双目立体视觉重建
6. 多视图重建
7. SFM 系统设计
8. SLAM系统设计
第一部链接:https://blog.csdn.net/qq_35200351/article/details/136933771