13_pinctrl子系统
总结
pinctrl作为驱动
iomuxc节点在设备树里面 存储全部所需的引脚配置信息
iomux节点匹配pinctrl子系统
控制硬件外设的时候 要知道有哪些gpio 再看gpio有哪些服用寄存器
接着在程序配置gpio相关寄存器 这样搞效率很低
所以用iomux节点保存所有的引脚组 pinctrl驱动起来的时候获得所有引脚信息 保存在内存
pinctrl子系统预先确定引脚的数量和名字
- 为每个引脚的配置信息分配内存
- pinctrl子系统统一管理每个引脚的使用状态
-iomux节点存放了各种引脚属性,pinctrl驱动解析iomux节点,存放引脚信息进入内存
iomux节点里如何填写
//iomuxc节点
//imx6ull.dtsi
iomuxc: iomuxc@20e0000 {compatible = "fsl,imx6ul-iomuxc";reg = <0x20e0000 0x4000>;};
//继续扩展 引用iomux节点 **imx6ull-seeed-npi.dts**
&iomuxc {pinctrl-names = "default","init","sleep"; //选定引脚状态pinctrl-0 = <&pinctrl_uart1>; //一个状态就是一组引脚,比如对应下面pinctrl-1 =<&xxx>;pinctrl-2 =<&yyy>;
...pinctrl_uart1: uart1grp {fsl,pins = <MX6UL_PAD_UART1_TX_DATA__UART1_DCE_TX 0x1b0b1MX6UL_PAD_UART1_RX_DATA__UART1_DCE_RX 0x1b0b1>;};...
}
上面 引脚里面的宏是什么意思
MX6UL_PAD_UART1_TX_DATA__UART1_DCE_TX
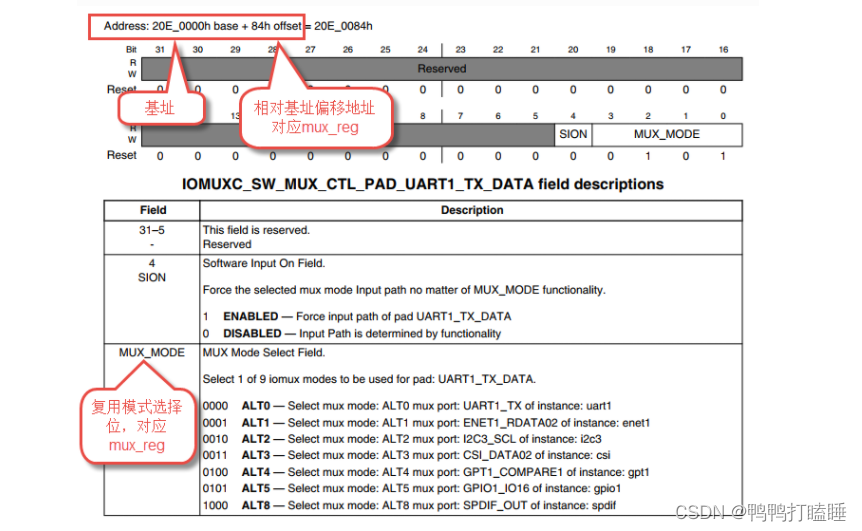
#define MX6UL_PAD_UART1_TX_DATA__UART1_DCE_TX 0x0084 0x0310 0x0000 0 0
< mux_reg conf_reg input_reg mux_mode input_val >0x0084 0x0310 0x0000 0x0 0x0
mux_reg:引脚复用设置寄存器 基地址+mux_reg 就是 PIN 的复用寄存器地址。
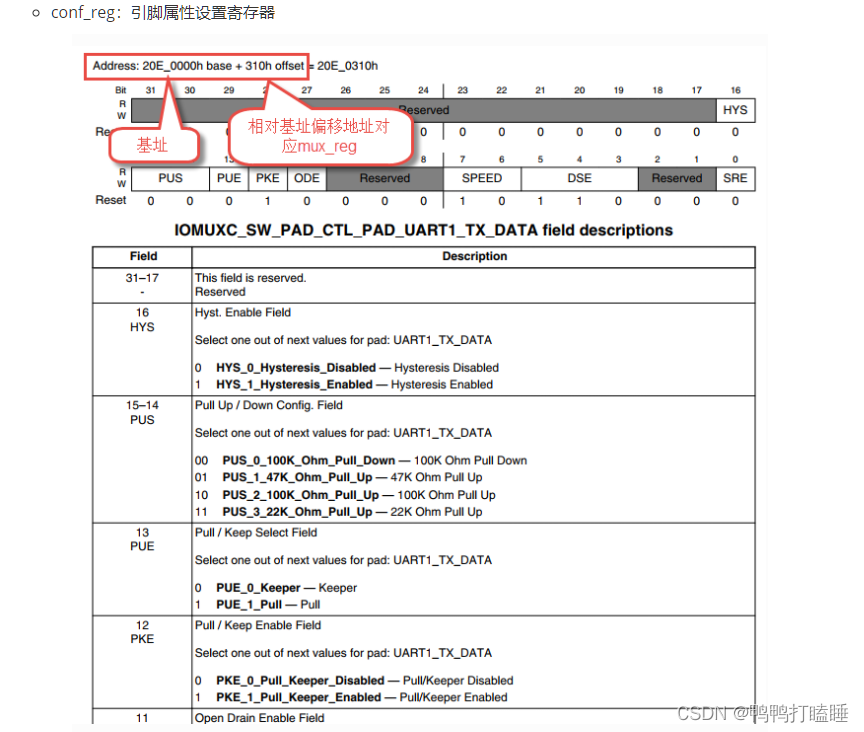
conf_reg : 设置这个引脚的电气属性的寄存器地址 基地址+conf_reg =设置pin的电气属性地址
input_reg:引脚输入设置寄存器 有些外设有 input_reg 寄存器
引脚需要输入功能时设置
mux_mode:复用寄存器设置值
设置引脚复用
input_val:输入寄存器设置值
设置引脚输入特性
宏的最后跟随了一串数字 用来设置PIN的电气属性值 比如IO 的上/下拉、驱动能力和速度等
引脚状态初始化
在设备树里面节点 会变成plantform_dev 会执行probe进行匹配驱动
但是执行probe和drv配对之前 先回执行really_porbe() 这个函数和下面的引脚状态关系很大
用来初始化引脚值
//iomuxc节点
//imx6ull.dtsi
iomuxc: iomuxc@20e0000 {compatible = "fsl,imx6ul-iomuxc";reg = <0x20e0000 0x4000>;};
//继续扩展 引用iomux节点 **imx6ull-seeed-npi.dts**
&iomuxc {pinctrl-names = "default","init","sleep"; //选定引脚状态pinctrl-0 = <&pinctrl_uart1>; //一个状态就是一组引脚,比如对应下面pinctrl-1 =<&xxx>;pinctrl-2 =<&yyy>;
...pinctrl_uart1: uart1grp {fsl,pins = <MX6UL_PAD_UART1_TX_DATA__UART1_DCE_TX 0x1b0b1MX6UL_PAD_UART1_RX_DATA__UART1_DCE_RX 0x1b0b1>;};...
}
还是用上一个设备树举例 看了下面的例子
就知道驱动的引脚其实在 probe之前就已经初始化好了电气属性了
drivers/base/dd.c
static int really_probe(struct device *dev, struct device_driver *drv)
{int ret = -EPROBE_DEFER;
...
re_probe:dev->driver = drv;ret = pinctrl_bind_pins(dev); //这里根据iomux节点的 几个引脚状态来初始化引脚组
...if (dev->bus->probe) {ret = dev->bus->probe(dev);if (ret)goto probe_failed;} else if (drv->probe) {ret = drv->probe(dev); //这个是熟悉的probeif (ret)goto probe_failed;}...}
int pinctrl_bind_pins(struct device *dev)dev->pins->default_state = pinctrl_lookup_state(dev->pins->p,PINCTRL_STATE_DEFAULT);//从设备节点状态找到指定状态//本次是default状态dev->pins->init_state = pinctrl_lookup_state(dev->pins->p,PINCTRL_STATE_INIT); /这次找init状态if (IS_ERR(dev->pins->init_state))pinctrl_select_state(dev->pins->p,dev->pins->default_state);//没有init状态变成default状态elseret = pinctrl_select_state(dev->pins->p, dev->pins->init_state);//有的话引脚变成init状态