DVXplorer事件相机入门
DV官方文档:Get Started · DV (inivation.gitlab.io)
DV事件相机的ROS包:https://github.com/uzh-rpg/rpg_dvs_ros
事件相机的资源汇总:https://github.com/uzh-rpg/event-based_vision_resources
1.DV事件相机ROS包驱动程序安装
注意:将以下指令中提及的任何noetic替换为您当前ROS发行版的名称
- 安装ROS依赖
sudo apt-get install ros-noetic-camera-info-manager
sudo apt-get install ros-noetic-image-view
- 安装libcaer
sudo apt-get install libcaer-dev
- 安装catkin工具
sudo apt-get install python-catkin-tools
- 创建工作空间(指令参考:ROS指令大全)
cd ~
mkdir -p catkin_ws/src
cd catkin_ws
catkin config --init --mkdirs --extend /opt/ros/noetic --merge-devel --cmake-args -DCMAKE_BUILD_TYPE=Release
- 克隆将用于生成 DVS/DAVIS 驱动程序包的包 (https://github.com/catkin/catkin_simple):
catkin_simple
cd ~/catkin_ws/src
git clone https://github.com/catkin/catkin_simple.git
git clone https://github.com/uzh-rpg/rpg_dvs_ros.git
- 编译包
cd ~/catkin_ws
catkin_make # 编译工作区内的所有功能包
# 或者选择性的编译下面的功能包
catkin build dvs_renderer # 渲染器(图片查看器)
catkin build dvs_ros_driver # DVS128
catkin build davis_ros_driver # DAVIS
catkin build dvxplorer_ros_driver # DVXplorer
- 更新环境
source ~/catkin_ws/devel/setup.bash
2.测试DV相机
连接DV相机并通过启动下面的launch来启动DV相机
roslaunch dvs_renderer dvs_mono.launch # DVS128
roslaunch dvs_renderer davis_mono.launch # DAVIS
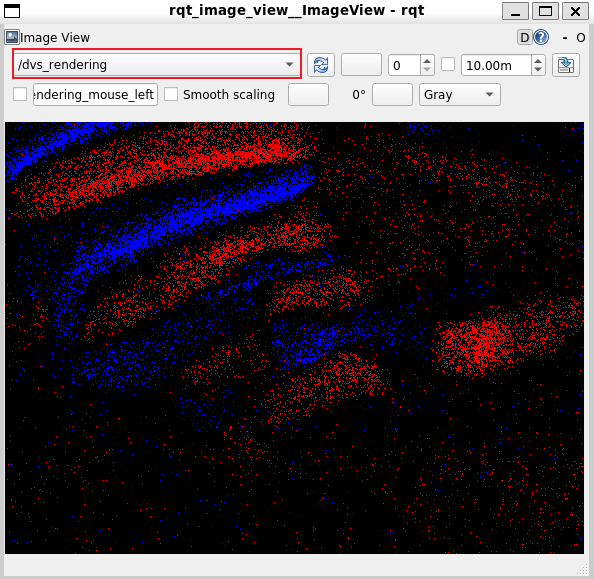
roslaunch dvs_renderer dvxplorer_mono.launch # DVXplorer
我使用的是DVXplorer相机,主题切换到/dvs_rendering,并在镜头前晃动即可显示下面的画面
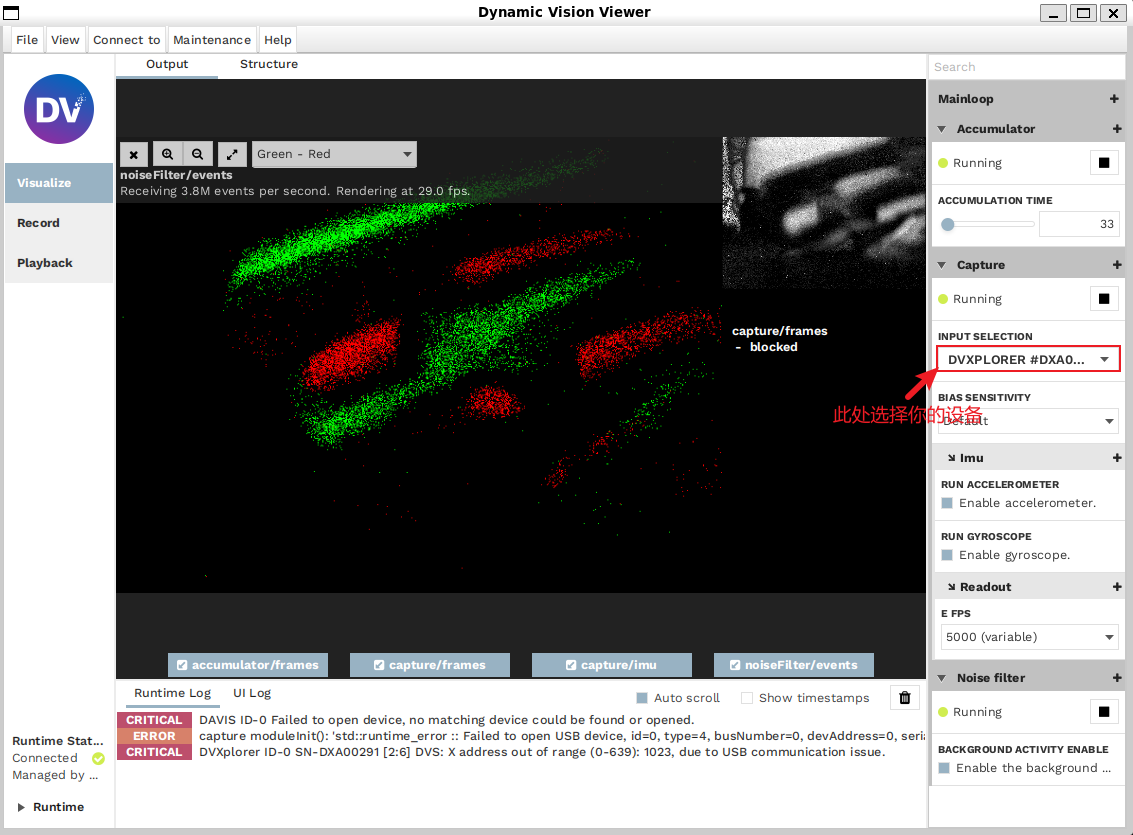
3.使用DV-GUI来启动DV相机(可选)
DV-GUI是用于 iniVation 动态视觉传感器 (DVS/DAVIS) 的软件,可以通过连接到DV相机并显示其输出。它也是官方软件开发工具包,用于为基于事件的相机编写应用软件。目前支持的操作系统有Win、Macos、Ubuntu、Fedora、Arch linux、树莓派等
-
Windows- 下载并安装DV:【点击下载】
- Windows下DV软件有bug,需要修改系统显示语言为English,这步一定要弄,不然无法正常使用:在 Windows 中管理显示语言设置 - Microsoft 支持
-
Ubuntu
我们在x86_64、arm64和armhf架构上为Focal (20.04 LTS) 和Jammy (22.04 LTS)提供了一个 PPA 存储库。请注意,
dv-gui仅在 x86_64上可用,dv-runtime在所有支持的架构上可用。
sudo add-apt-repository ppa:inivation-ppa/inivation
sudo apt-get update
sudo apt-get install dv-gui
使用dv-gui指令来启动软件
注:如果设备无法识别,或者无法查找,请确保DV相机是否正常运行并连接到电脑上,尝试拔插USB来重启DV相机;如果你在WSL中使用
DV-GUI,请确保USB设备能够在WSL中正常识别,WSL中添加USB设备参考教程:wsl连接USB设备
