单片机14-17
目录
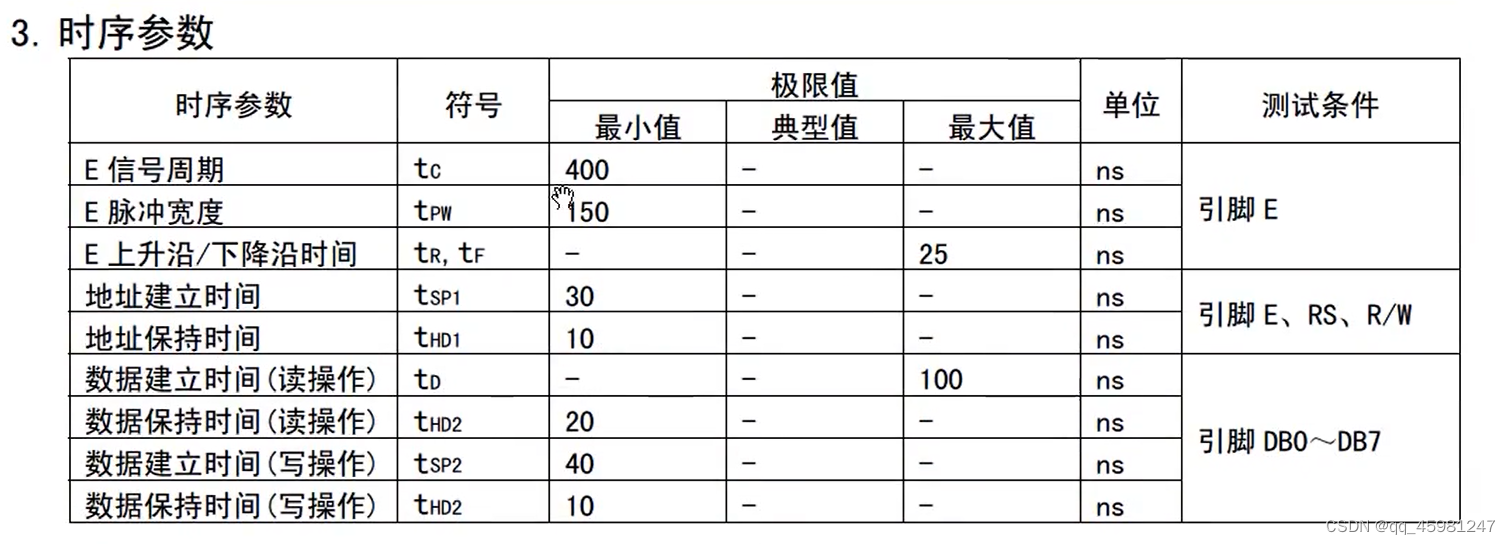
LCD1602
LCD1602液晶显示屏
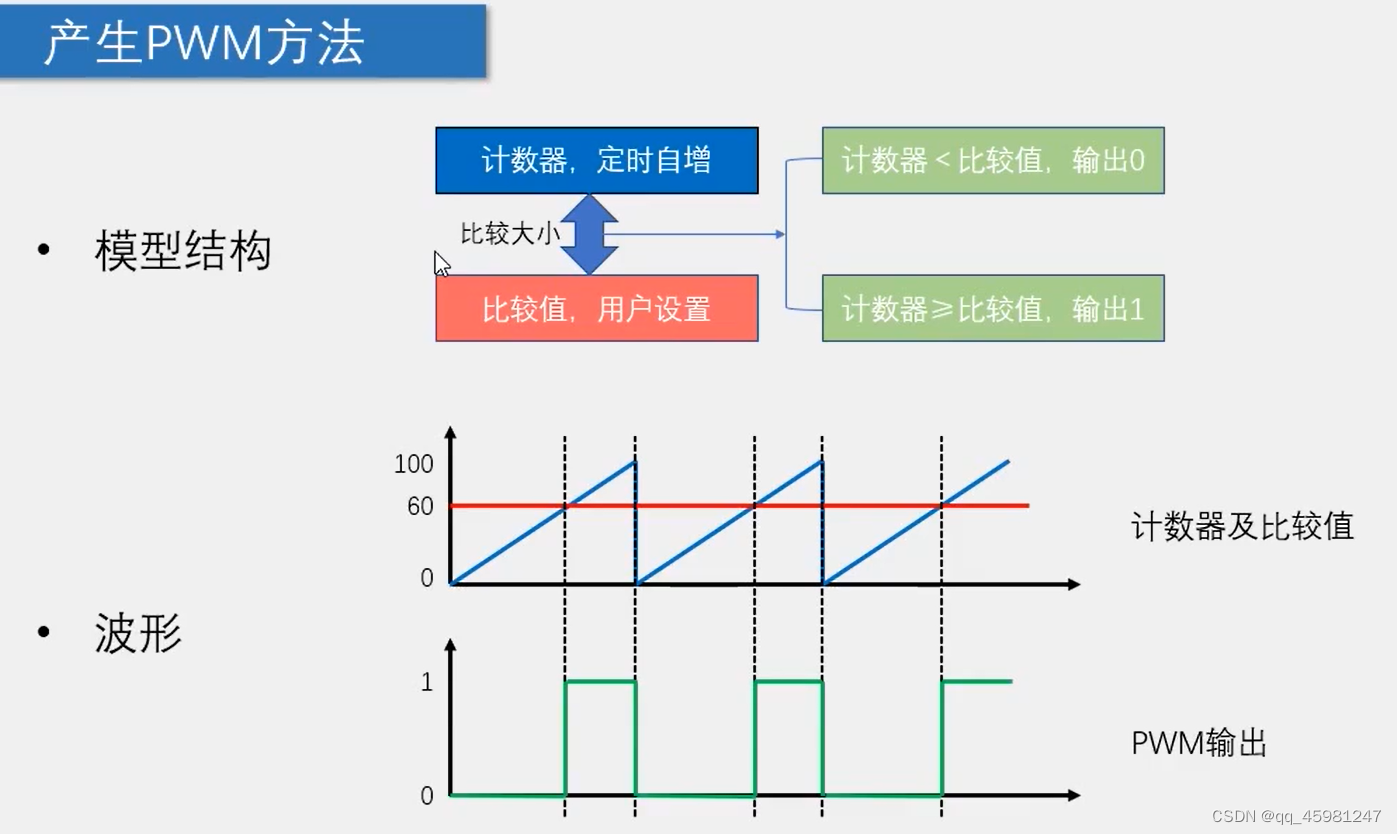
直流电机驱动(PWM)
LED呼吸灯
直流电机调速
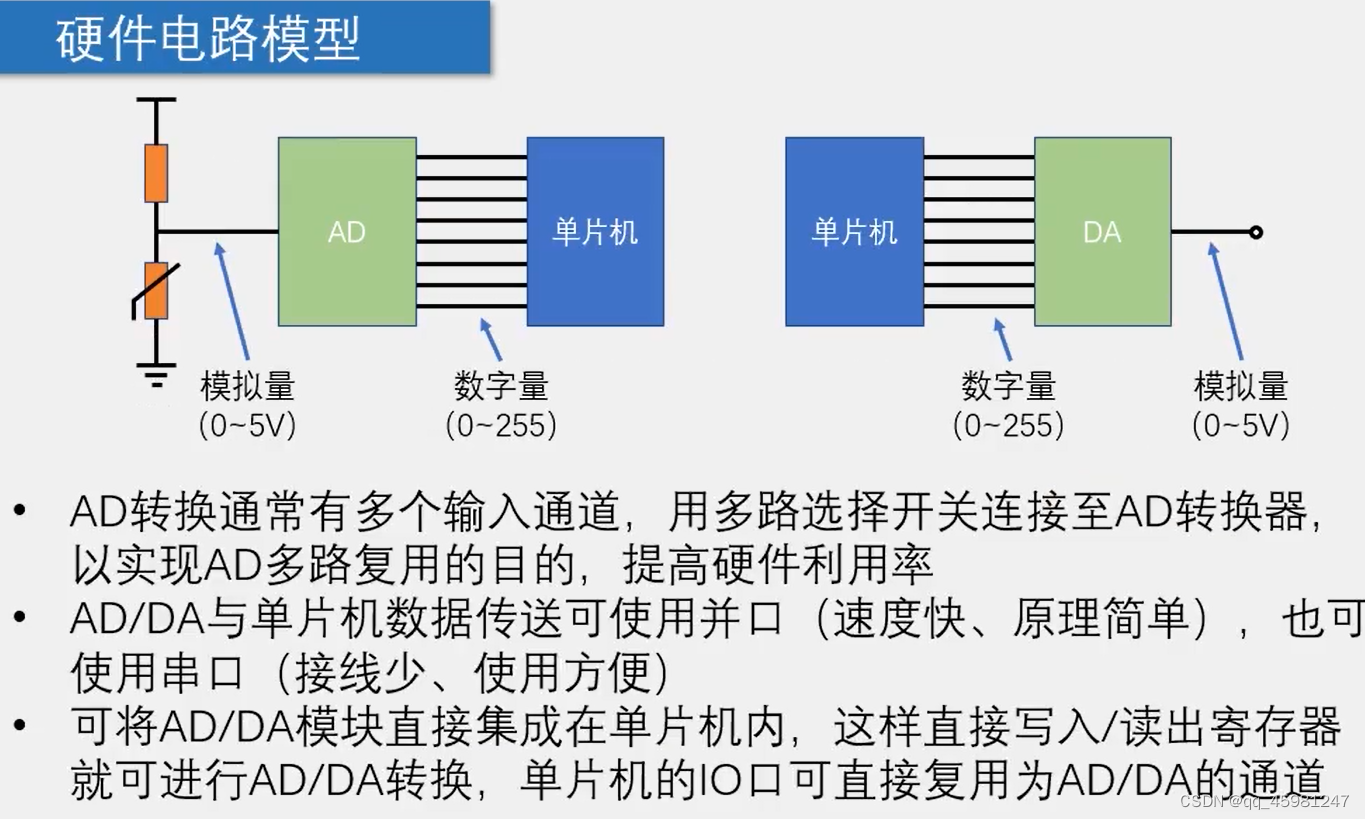
AD/DA(SPI通信)
AD模数转换
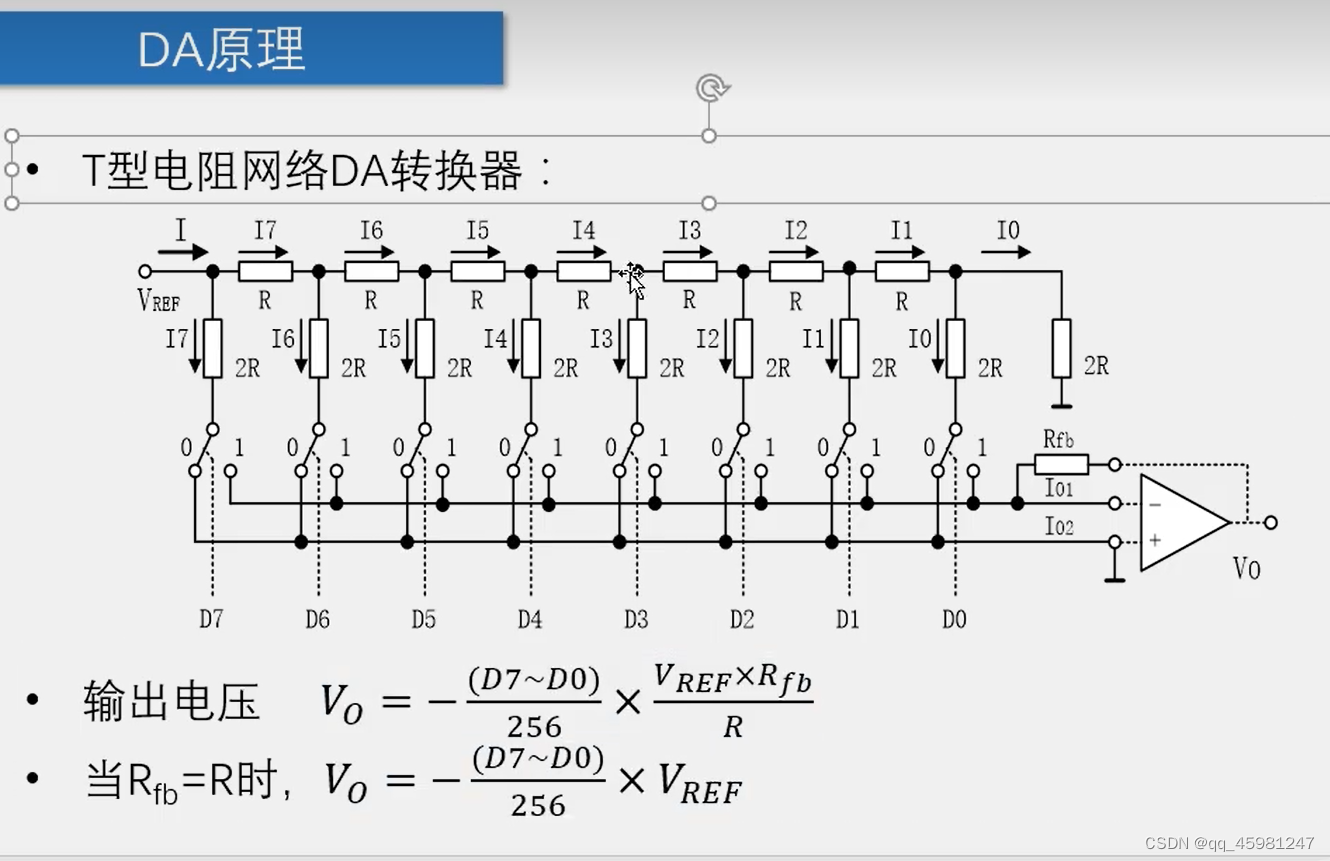
DA数模转换
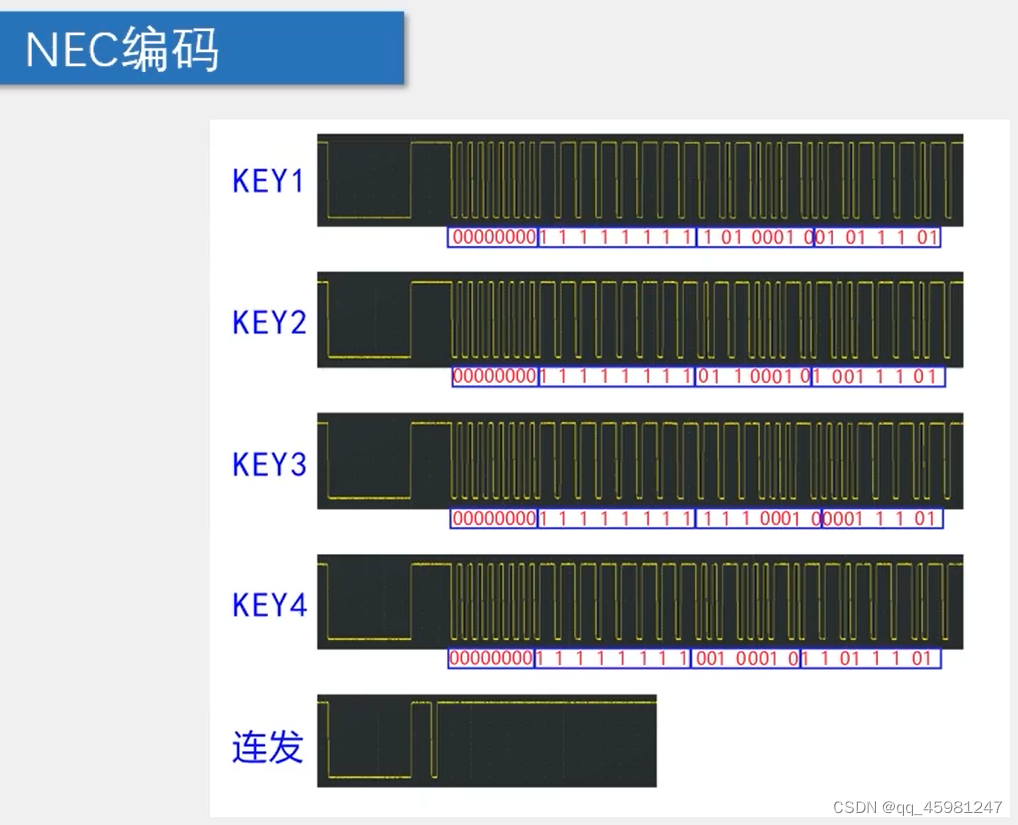
红外遥控(外部中断)
红外遥控
红外遥控电机调速
LCD1602





LCD1602液晶显示屏
LCD1602.c
#include <REGX52.H>
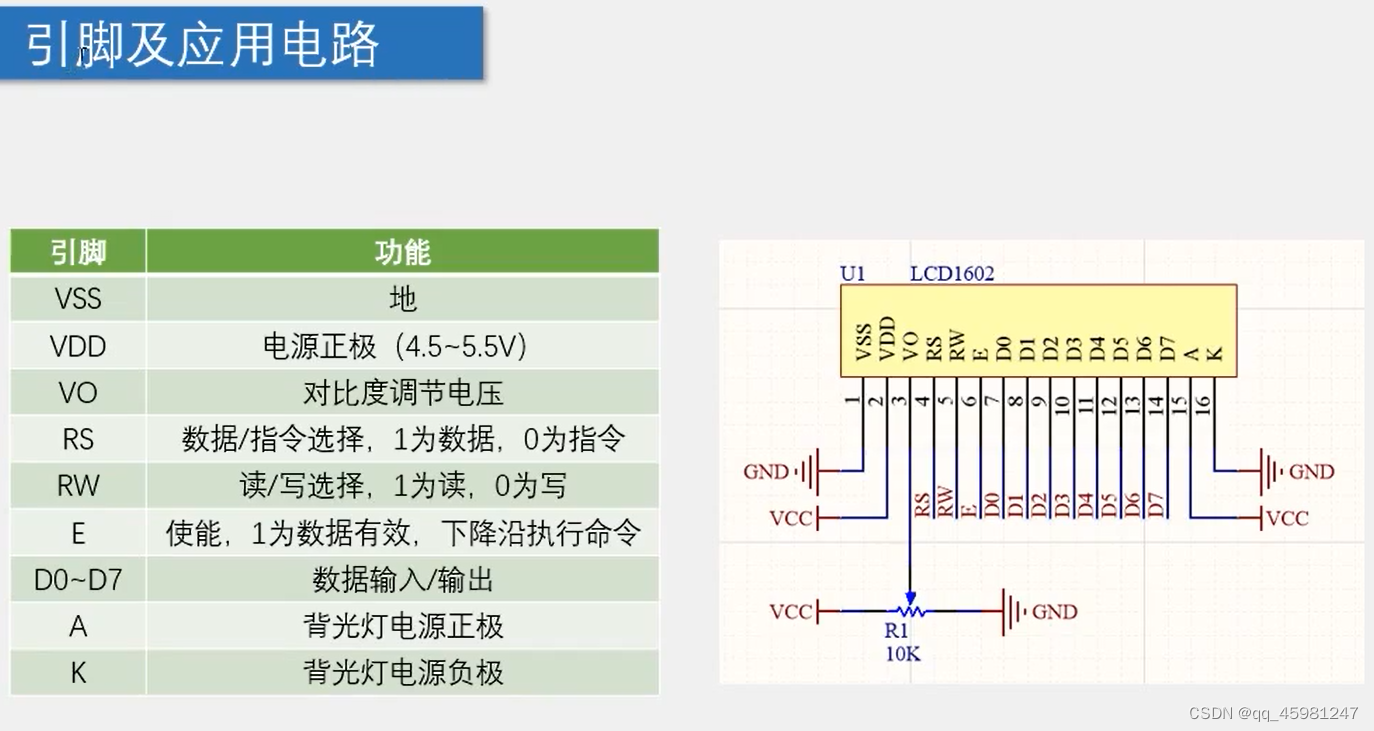
#include "intrins.h"sbit LCD_RS = P2^6;//引脚定义
sbit LCD_WR = P2^5;
sbit LCD_EN = P2^7;#define LCD_DataPort P0//寄存器定义,define不要使用分号void LCD_Delay() //@11.0592MHz,2ms
{unsigned char i, j;_nop_();i = 2;j = 199;do{while (--j) ;} while (--i);
}/*** @brief 写指令* @param Command 指令* @retval 无*/
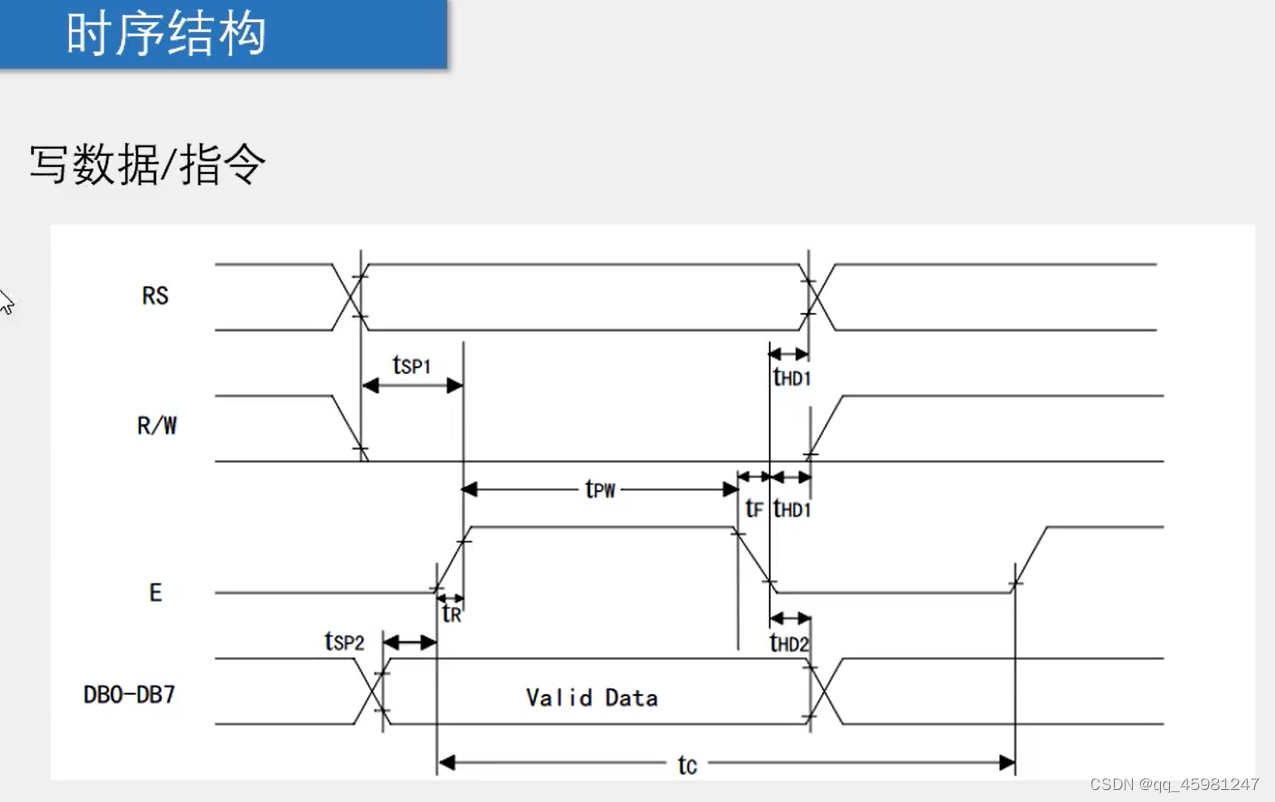
void LCD_WriteCommand(unsigned char Command)//写指令
{LCD_RS = 0;//1为数据,0为指令LCD_WR = 0;//1为读,0为写LCD_DataPort = Command;//放入指令LCD_EN = 1;//使能LCD_Delay();//延时一毫秒LCD_EN = 0;//结束使能LCD_Delay();
}/*** @brief 写数据* @param Data 数据* @retval 无*/
void LCD_WriteData(unsigned char Data)//写数据
{LCD_RS = 1;//1为数据,0为指令LCD_WR = 0;//1为读,0为写LCD_DataPort = Data;//放入数据LCD_EN = 1;//使能LCD_Delay();//延时一毫秒LCD_EN = 0;//结束使能LCD_Delay();
}/*** @brief 初始化显示屏* @param 无* @retval 无*/
void LCD_Init(void)
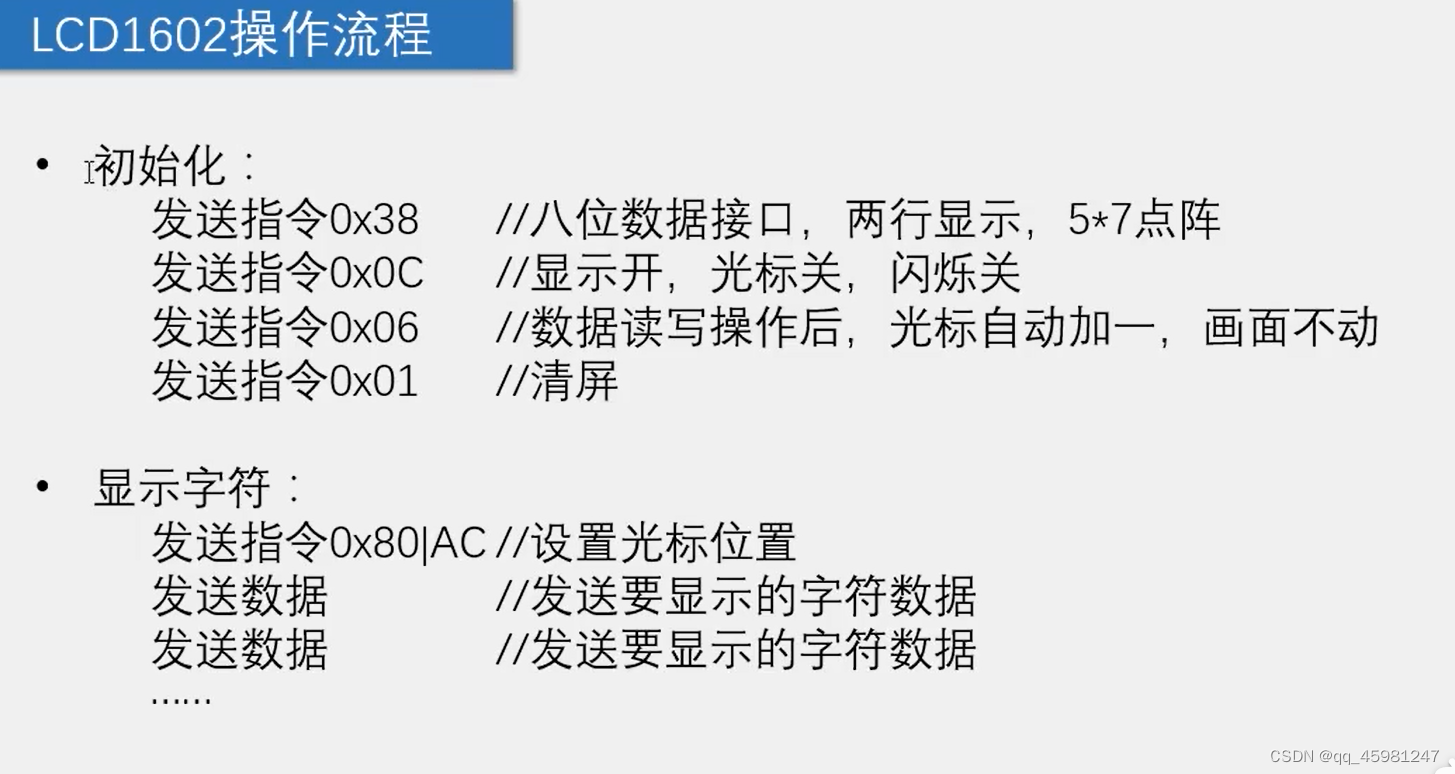
{LCD_WriteCommand(0x38);//八位数据,两行显示,5*7点阵LCD_WriteCommand(0x0C);//显示开,光标关,闪烁关LCD_WriteCommand(0x06);//数据读写操作后,光标自动加一,画面不动LCD_WriteCommand(0x01);//清屏
}/*** @brief 移动光标到目标位置* @param Line行 Column列* @retval 无 */
void LCD_SetCursor(unsigned char Line,unsigned char Column)//设置光标位置
{if(Line == 1){LCD_WriteCommand(0x80|(Column - 1));//如果是第一行,那么实际地址即为列-1,//并设置光标位置,为什么是0x80,地址设置DDRAM}else{LCD_WriteCommand(0x80|(Column - 1) + 0x40);//如果是第二行,则进行偏移0x40即为实际地址//并设置光标位置}
}/*** @brief 显示字符* @param Line 行 * @param Column 列 * @param Char 显示的字符 * @retval 无*/
void LCD_ShowChar(unsigned char Line,unsigned char Column,unsigned char Char)
{LCD_SetCursor(Line,Column);LCD_WriteData(Char);//写入数据
}/*** @brief 显示字符串* @param Line 行 * @param Column 列 * @param String 显示的字符串 * @retval 无*/
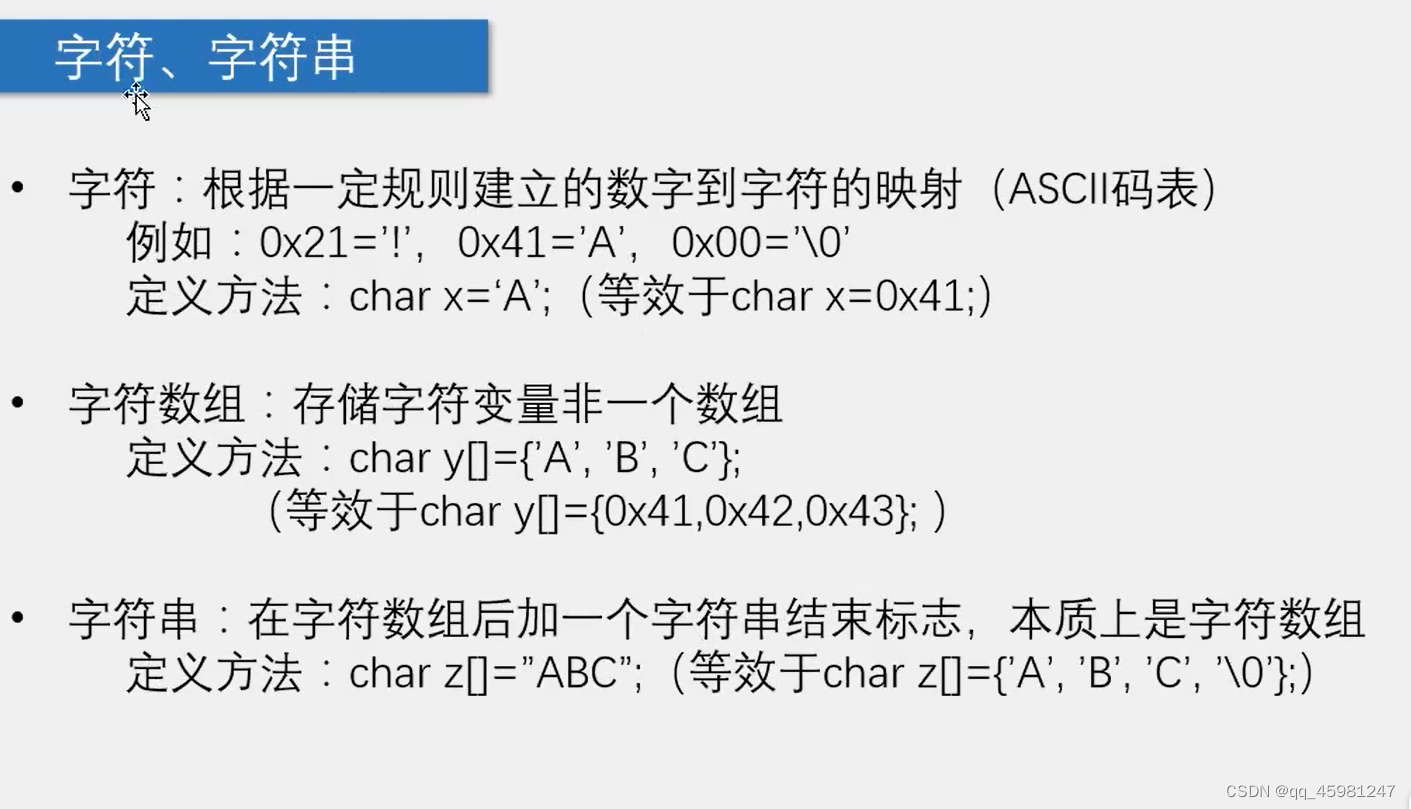
void LCD_ShowString(unsigned char Line,unsigned char Column, unsigned char *String)
{unsigned char i;LCD_SetCursor(Line,Column);for(i = 0;String[i] != '\0';i++)//遍历字符串String{LCD_WriteData(String[i]);//写入数据}
}int LCD_Pow(int X,int Y)
{unsigned char i;int Result = 1;for( i=0;i<Y;i++){Result *= X;//X^Y}return Result;
}/*** @brief 显示无符号数字* @param Line 行 * @param Column 列 * @param Num 显示的无符号数字 * @retval 无*/
void LCD_ShowNum(unsigned char Line,unsigned char Column,unsigned int Num,unsigned char Len)
{unsigned char i;LCD_SetCursor(Line,Column);for(i=Len ; i>0 ;i--){//LCD_WriteData(0x30 + Num / LCD_Pow(10,i-1)%10); //获取各位数值并写入显示屏LCD_WriteData('0' + Num / LCD_Pow(10,i-1)%10);//或者转化为ascii码}
}/*** @brief 显示有符号数字* @param Line 行 * @param Column 列 * @param Num 显示的有符号数字 * @retval 无*/
void LCD_ShowSignedNum(unsigned char Line,unsigned char Column,int Num,unsigned char Len)
{unsigned char i;unsigned int Num1;LCD_SetCursor(Line,Column);if(Num >= 0 ){LCD_WriteData('+');Num1 = Num;}else{LCD_WriteData('-');Num1 = -Num;}for(i=Len ; i>0 ;i--){//LCD_WriteData(0x30 + Num / LCD_Pow(10,i-1)%10); //获取各位数值并写入显示屏LCD_WriteData('0' + Num1 / LCD_Pow(10,i-1)%10);//或者转化为ascii码}
}/*** @brief 显示十六进制数字* @param Line 行 * @param Column 列 * @param Num 显示的十六进制数字 * @retval 无*/
void LCD_ShowHexNum(unsigned char Line,unsigned char Column,unsigned int Num,unsigned char Len)
{unsigned char i;unsigned char SingleNum;LCD_SetCursor(Line,Column);for(i=Len ; i>0 ;i--){SingleNum = Num / LCD_Pow(16,i-1)%16;if(SingleNum < 10){LCD_WriteData('0' + SingleNum);//获取各位数值并写入显示屏}else{LCD_WriteData('A' + SingleNum - 10);//修改偏移量}}
}/*** @brief 显示二进制数字* @param Line 行 * @param Column 列 * @param Num 显示的二进制数字 * @retval 无*/
void LCD_ShowBinNum(unsigned char Line,unsigned char Column,unsigned int Num,unsigned char Len)
{unsigned char i;LCD_SetCursor(Line,Column);for(i=Len ; i>0 ;i--){LCD_WriteData('0' + Num / LCD_Pow(2,i-1)%2);}
}#include <REGX52.H>
#include "LCD1602.h"
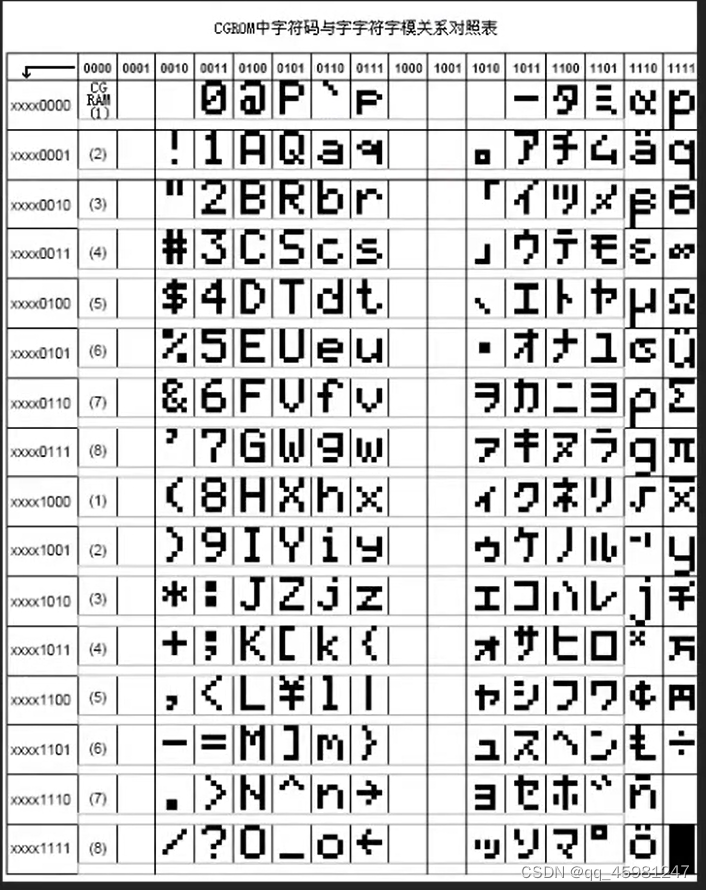
#include "Delay.h"void main(){LCD_Init();LCD_ShowChar(1,1,'A');//显示字符ALCD_ShowString(1,3,"Hello");//显示字符串LCD_ShowNum(1,9,66,2);//显示无符号数字LCD_ShowSignedNum(1,12,-66,2);//显示有符号数字LCD_ShowHexNum(2,1,0xA5,2);//显示十六进制LCD_ShowBinNum(2,4,0xA5,8);//显示二进制LCD_ShowChar(2,13,0xDF);//显示度数符号LCD_ShowChar(2,14,'C');//显示字符CLCD_ShowString(1,16,"Welcome to China!");while( 1 ){LCD_WriteCommand(0x18);//流动字幕(指令集)Delay(500);}}直流电机驱动(PWM)

LED呼吸灯
main.c
#include <REGX52.H>sbit LED = P2^0;void Delay(unsigned int t)
{while(t--);
}void main(){unsigned char Time,i;while( 1 ){for(Time = 0; Time < 100;Time++){for(i = 0; i < 20;i++){LED = 0;Delay(Time);LED = 1;Delay(100 - Time);}}for(Time = 100; Time > 0;Time--){for(i = 0; i < 20;i++){LED = 0;Delay(Time);LED = 1;Delay(100 - Time);}}}}直流电机调速
main.c
#include <REGX52.H>
#include "Delay.h"
#include "Nixie.h"
#include "Key.h"
#include "Timer0.h"unsigned char Counter,Compare;
unsigned char KeyNum,Speed;
sbit Motor = P1^0;//ULN2003Dvoid main(){Timer0Init();//Compare值看自己如何设置,主要看与之比较后你想输出高/低电平,//这里是小于输出高电平while( 1 ){KeyNum = Key();if(KeyNum == 1){Speed++;Speed %= 4;//重置为0if(Speed==0){Compare=0;}if(Speed==1){Compare=50;}if(Speed==2){Compare=75;}if(Speed==3){Compare=100;}}Nixie(1,Speed);}}void Timer0_Routine() interrupt 1{TL0 = 0xA4; //设置定时初值TH0 = 0xFF; //设置定时初值
//100us定时器Counter++;Counter %= 100;//将Counter刷新为0if(Counter < Compare){Motor = 1;//高电平转}else{Motor = 0;}
}AD/DA(SPI通信)


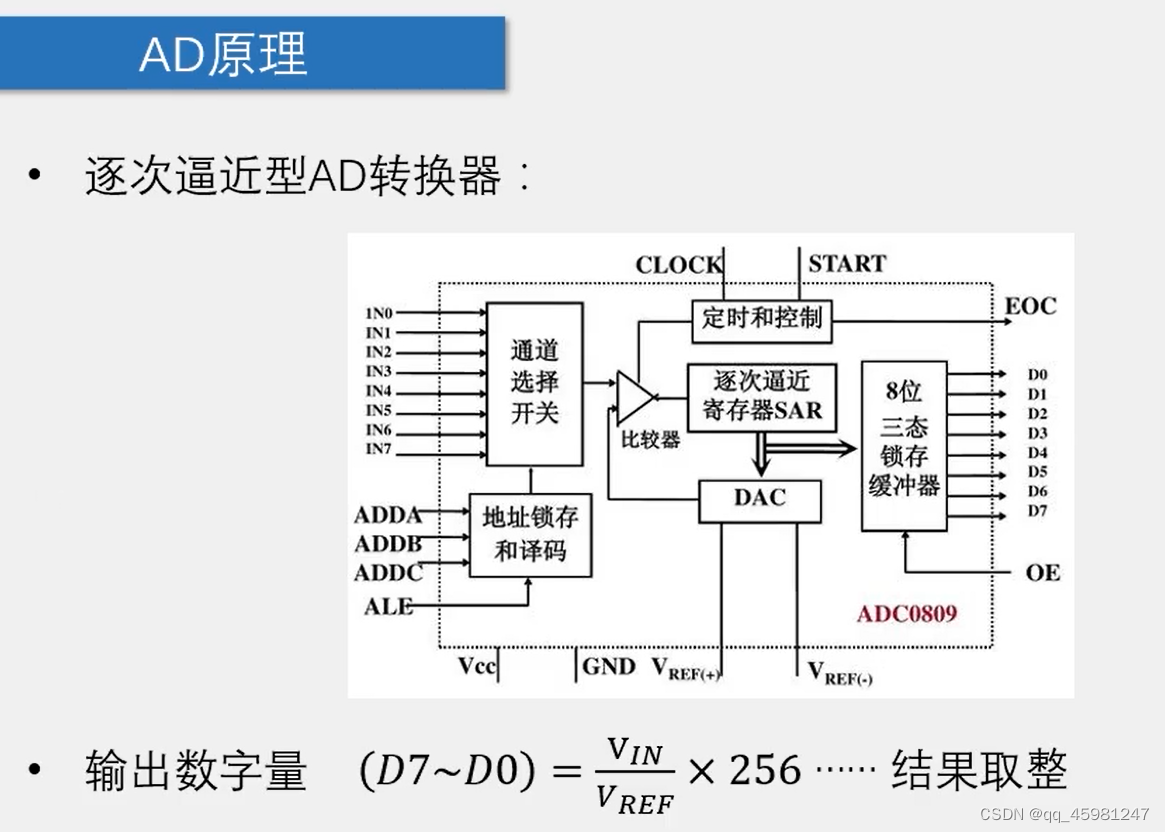

AD模数转换
ET2046.c
#include <REGX52.H>
#include "Delay.h"sbit ET2046_CS = P3^5;
sbit ET2046_DCLK = P3^6;
sbit ET2046_DIN = P3^4;
sbit ET2046_DOUT = P3^7;/*** @brief 相当于当过电阻变化,来输出一些数据* @param Command 控制字* @retval ADValue 读取到的数据*/
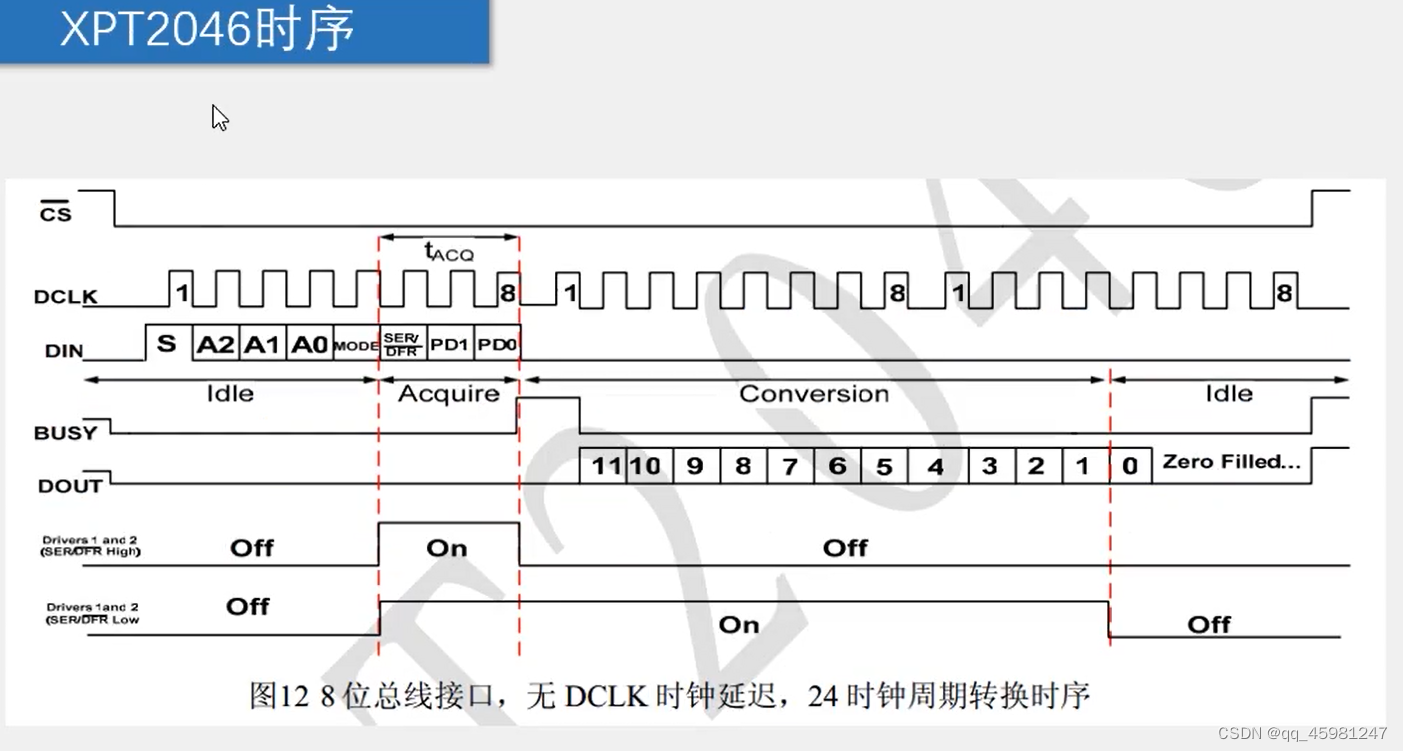
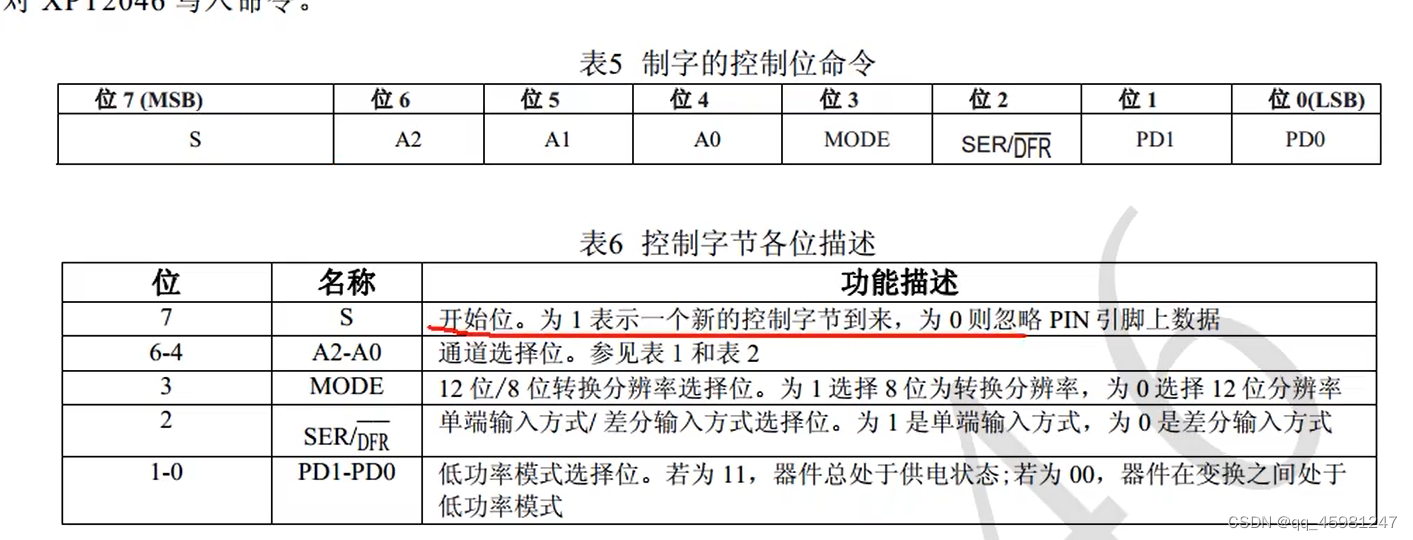
unsigned int ET2046_ReadAD(unsigned char Command)//控制字
{unsigned char i;unsigned int ADValue = 0;ET2046_DCLK = 0;ET2046_CS = 0;//拉低进入时序for(i = 0; i<8 ; i++)//发送一个字节{ET2046_DIN = Command & (0x80 >> i);//获得最高位并将其放入DINET2046_DCLK = 1;ET2046_DCLK = 0;}for(i = 0; i < 16;i++)//读取两个字节长度{ET2046_DCLK = 1;ET2046_DCLK = 0;if(ET2046_DOUT){ADValue |= (0x8000>>i);//提前给三位}Delay(50);}ET2046_CS = 1;//结束时序if(Command & 0x08)//查看为什么模式,若得出为1,则是12位。0则为8位{return ADValue>>8;}else{return ADValue>>4;}
}ET2046.h
#ifndef __ET2046_H__
#define __ET2046_H__#define ET2046_XP_8 0x9C//0x8C
#define ET2046_YP_8 0xDC
#define ET2046_VBAT_8 0xAC
#define ET2046_AUX_8 0xEC#define ET2046_XP_12 0x94//0x84
#define ET2046_YP_12 0xD4
#define ET2046_VBAT_12 0xA4
#define ET2046_AUX_12 0xE4unsigned int ET2046_ReadAD(unsigned char Command);
#endifmain.c
#include <REGX52.H>
#include "LCD1602.h"
#include "Delay.h"
#include "ET2046.h"unsigned int ADValue;void main(){LCD_Init();LCD_ShowString(1,1,"ADJ NTC RG");while( 1 ){ADValue = ET2046_ReadAD(ET2046_XP_8);//XPLCD_ShowNum(2,1,ADValue,3);ADValue = ET2046_ReadAD(ET2046_YP_8);//YPLCD_ShowNum(2,6,ADValue,3);ADValue = ET2046_ReadAD(ET2046_VBAT_8);//LCD_ShowNum(2,11,ADValue,3);Delay(10);}}DA数模转换
main.c
#include <REGX52.H>
#include "Delay.h"
#include "Nixie.h"
#include "Key.h"
#include "Timer0.h"unsigned char Counter,Compare;sbit DA = P2^1;//DAunsigned char i;
void main(){Timer0Init();//Compare值越小LED越暗while( 1 ){for(i = 0;i < 100;i++){Compare = i;Delay(10);}for(i = 100;i > 0;i--){Compare = i;Delay(10);}}}void Timer0_Routine() interrupt 1{TL0 = 0xA4; //设置定时初值TH0 = 0xFF; //设置定时初值Counter++;Counter %= 100;//将Counter刷新为0if(Counter < Compare){DA = 1;}else{DA = 0;}
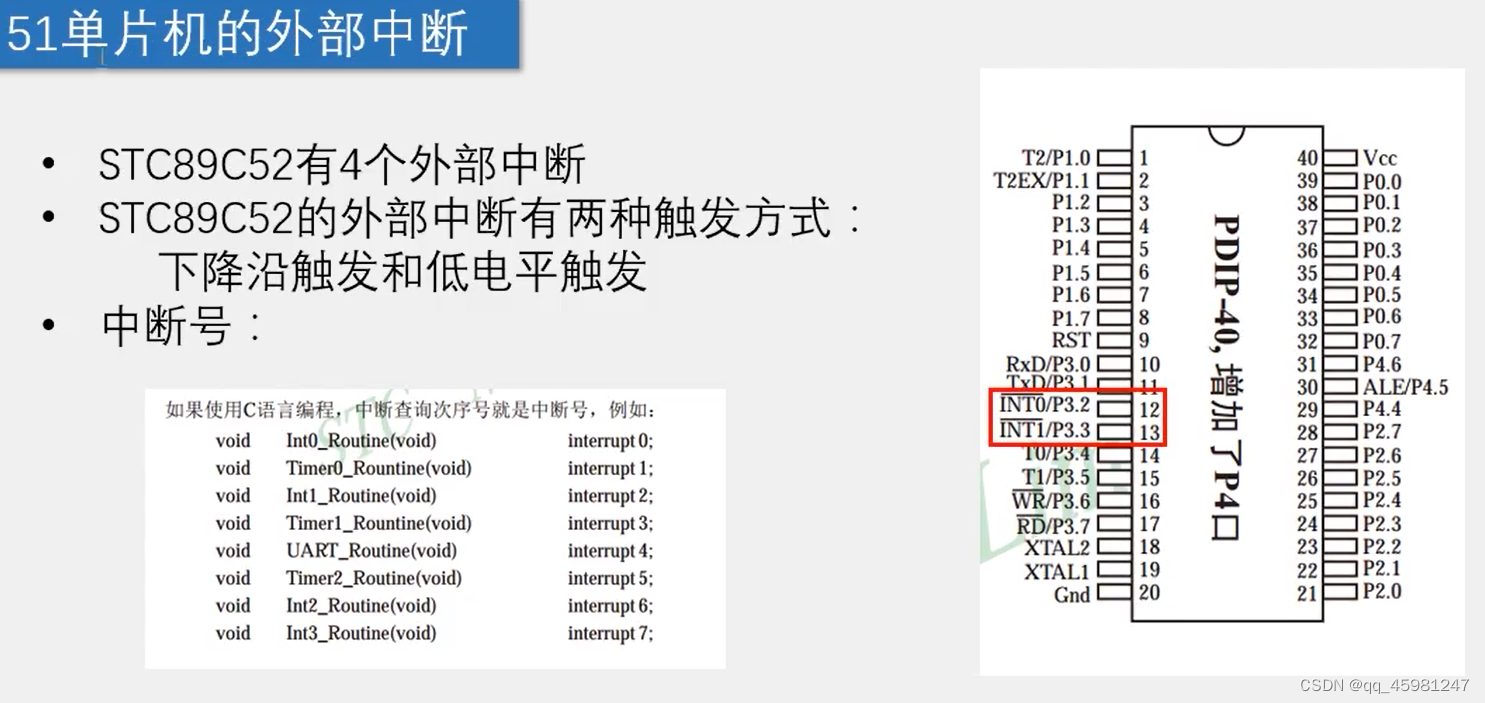
}红外遥控(外部中断)



红外遥控
Int0.c
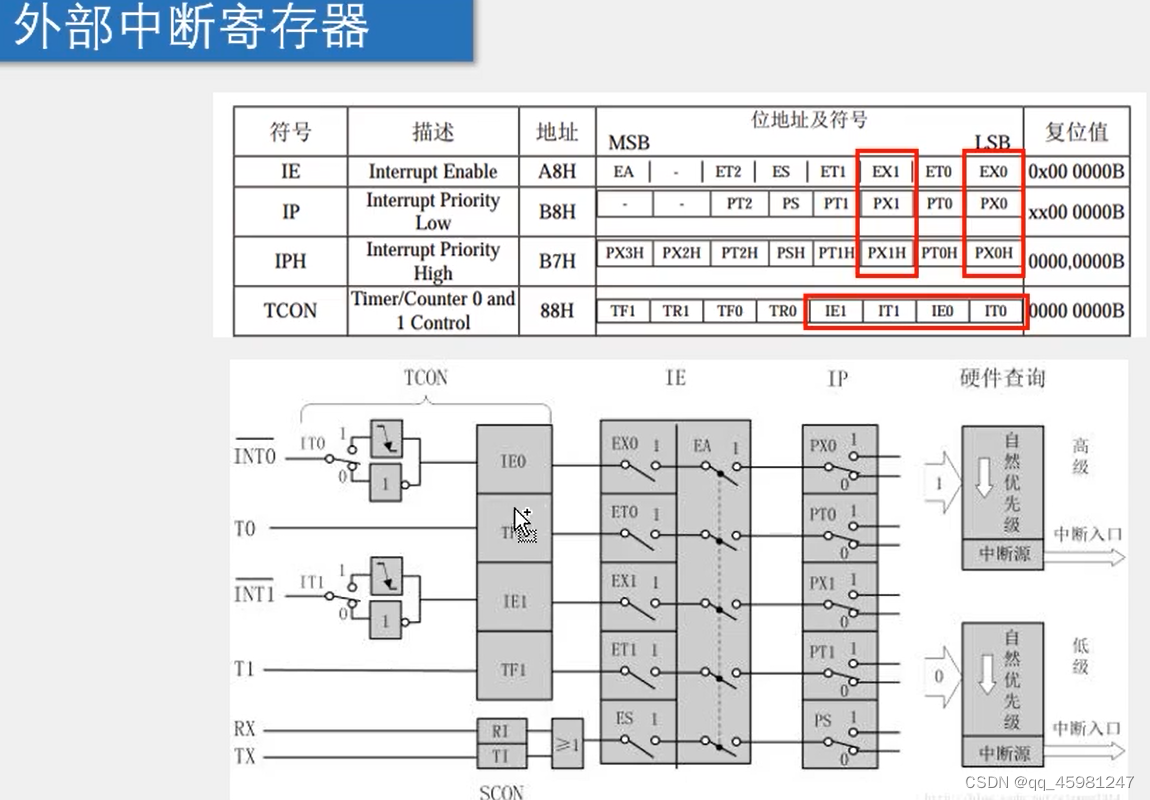
#include <REGX52.H>/*** @brief 外部中断0初始化* @param 无* @retval 无*/
void Int0_Init(void)
{IT0 = 1;//1下降沿触发,0低电平触发IE0 = 0;//中断标志EX0 = 1;//打开中断EA = 1;//允许所有中断PX0 = 1;//中断优先级
}/*外部中断0函数模板
void Int0_Routine(void) interrupt 0
{Num++;} */
Timer0.c
#include <REGX52.H>/*** @brief 定时器0初始化* @param 无* @retval 无*/
void Timer0_Init(void) //1微秒@12.000MHz
{TMOD &= 0xF0; //设置定时器模式TMOD |= 0x01; //设置定时器模式TL0 = 0; //设置定时初值TH0 = 0; //设置定时初值TF0 = 0; //清除TF0标志TR0 = 0; //定时器0开始计时
}/*** @brief 定时器0设置计数器值* @param Value,要设置的计数器值,范围:0~65535* @retval 无*/
void Timer0_SetCounter(unsigned int Value)
{TH0 = Value / 256;TL0 = Value % 256;
}/*** @brief 定时器0获取计数器值* @param 无* @retval 计数器值,范围:0~65535*/
unsigned int Timer0_GetCounter(void)
{return (TH0 << 8 )| TL0;
}/*** @brief 定时器0启动停止控制* @param Flag 启动停止标志,1为启动,0为停止* @retval 无*/
void Timer0_Run(unsigned char Flag)
{TR0 = Flag;
}IR.c
#include <REGX52.H>
#include "Timer0.h"
#include "Int0.h"unsigned int IR_Time;
unsigned char IR_State;unsigned char IR_Data[4];//数据缓存
unsigned char IR_PData;//指向当前位置unsigned char IR_DataFlag;//结束位
unsigned char IR_RepeatFlag;//重置位
unsigned char IR_Address;//地址码
unsigned char IR_Command;//变量码/*** @brief 红外遥控初始化* @param 无* @retval 无*/
void IR_Init(void)
{Timer0_Init();Int0_Init();
}/*** @brief 红外遥控获取到数据帧标志位* @param 无* @retval 是否收到数据帧,1为收到,0为未收到*/
unsigned char IR_GetDataFlag(void)
{if(IR_DataFlag){IR_DataFlag = 0;//清零return 1;//代表收到}return 0;
}/*** @brief 红外遥控获取收到连发帧标志位* @param 无* @retval 是否收到连发帧,1为收到,0为未收到*/
unsigned char IR_GetRepeatFlag(void)
{if(IR_RepeatFlag){IR_RepeatFlag = 0;//清零return 1;//代表收到}return 0;
}/*** @brief 红外遥控获取收到的地址数据* @param 无* @retval 收到的地址数据*/
unsigned char IR_GetAddress(void)
{return IR_Address;
}/*** @brief 红外遥控获取收到的命令数据* @param 无* @retval 收到的命令数据*/
unsigned char IR_GetCommand(void)
{return IR_Command;
}void Int0_Routine(void) interrupt 0
{if(IR_State == 0)//状态0,下降沿触发{Timer0_SetCounter(0);//定时器清零Timer0_Run(1);//定时器启动IR_State = 1;//调整状态为1}else if(IR_State == 1)//为状态1时,等待Start信号或Repeat信号{IR_Time = Timer0_GetCounter();//获取上次中断到此次中断的时间Timer0_SetCounter(0);//便于下次计时if(IR_Time > 12442 - 500 && IR_Time < 12442 + 500 ){IR_State = 2;//置状态为2}else if(IR_Time > 10368 - 500 && IR_Time < 10368 + 500)//接收到Repeat信号{IR_RepeatFlag = 1;//连发帧标志为1Timer0_Run(0);//停止计时器IR_State = 0;//转为空闲}else{IR_State = 1;//搜寻起始信号}}else if(IR_State == 2)//状态2,接收数据{IR_Time = Timer0_GetCounter();Timer0_SetCounter(0);//获得上个中断到这个中断之间的时间,并立即清零if(IR_Time > 1032 - 500 && IR_Time < 1032 + 500 )//如果接收到0{IR_Data[IR_PData/8] &= ~(0x01<<(IR_PData % 8));//将数据存入IR_Data中(32位),对应数据置0IR_PData++;//位置指针自增}else if(IR_Time > 2250 - 500 && IR_Time < 2250 + 500 )//如果接收到1{IR_Data[ IR_PData / 8] |= (0x01<<(IR_PData % 8));//将数据对应位置置1,将数据存入IR_Data中IR_PData++;}else{IR_PData = 0;//数据位置指针清零IR_State = 1;//搜寻起始信号}if(IR_PData >= 32)//如果接收到32位数据{IR_PData = 0;//数据位置指针清零if((IR_Data[0] == ~IR_Data[1]) && (IR_Data[2] == ~IR_Data[3]))//数据验证{IR_DataFlag = 1;IR_Address = IR_Data[0];//存入地址码IR_Command = IR_Data[2];//存入命令码IR_DataFlag = 1;//接收到数据}Timer0_Run(0);//停止定时器IR_State = 0;//恢复空闲}}
} main.c
#include <REGX52.H>
#include "Delay.h"
#include "LCD1602.h"
#include "IR.h"unsigned char Num;
unsigned char Address;
unsigned char Command;void main(){LCD_Init();LCD_ShowString(1,1,"ADDR CMD NUM");LCD_ShowString(2,1,"00 00 000");IR_Init();while( 1 ){if(IR_GetDataFlag() || IR_GetRepeatFlag())//如果收到数据帧或者连续发送{Address = IR_GetAddress();//获取遥控器地址码Command = IR_GetCommand();//获取遥控器命令码LCD_ShowHexNum(2,1,Address,2);//显示遥控器地址码LCD_ShowHexNum(2,8,Command,2);//显示遥控器命令码if(Command == IR_VOL_MINUS)//如果遥控器VOL-按键按下{Num --;}if(Command ==IR_VOL_ADD)//如果遥控器VOL+按键按下{Num ++;}LCD_ShowNum(2,14,Num,3);}}}
红外遥控电机调速
Timer1.c
#include <REGX52.H>/*** @brief 定时器1初始化,100微秒* @param 无* @retval 无*/
void Timer1Init(void) //100微秒@11.0592MHz
{TMOD &= 0x0F; //设置定时器模式TMOD |= 0x10; //设置定时器模式TL1 = 0xA4; //设置定时初值TH1 = 0xFF; //设置定时初值TF1 = 0; //清除TF1标志TR1 = 1; //定时器1开始计时ET1 = 1; EA = 1;PT1 = 0;
}/* 定时器中断函数模板
void Timer1_Routine() interrupt 3{static unsigned int T1Count;TL0 = 0xA4; //设置定时初值TH0 = 0xFF; //设置定时初值T1Count ++;if( T1Count >= 1000 ){T1Count = 0;}}
*/Timer0.c
#include <REGX52.H>/*** @brief 定时器0初始化* @param 无* @retval 无*/
void Timer0_Init(void) //1微秒@12.000MHz
{TMOD &= 0xF0; //设置定时器模式TMOD |= 0x01; //设置定时器模式TL0 = 0; //设置定时初值TH0 = 0; //设置定时初值TF0 = 0; //清除TF0标志TR0 = 0; //定时器0开始计时
}/*** @brief 定时器0设置计数器值* @param Value,要设置的计数器值,范围:0~65535* @retval 无*/
void Timer0_SetCounter(unsigned int Value)
{TH0 = Value / 256;TL0 = Value % 256;
}/*** @brief 定时器0获取计数器值* @param 无* @retval 计数器值,范围:0~65535*/
unsigned int Timer0_GetCounter(void)
{return (TH0 << 8 )| TL0;
}/*** @brief 定时器0启动停止控制* @param Flag 启动停止标志,1为启动,0为停止* @retval 无*/
void Timer0_Run(unsigned char Flag)
{TR0 = Flag;
}Motor.c
#include <REGX52.H>
#include "Timer1.h"sbit Motor = P1^0;//ULN2003D
unsigned char Counter,Compare;/*** @brief 电机初始化* @param 无* @retval 无*/
void Motor_Init()
{Timer1Init();
}/*** @brief 电机设置速度* @param Speed 要设置的速度,范围0~100* @retval 无*/
void Motor_SetSpeed(unsigned char Speed)
{Compare = Speed;
}void Timer1_Routine() interrupt 3{TL1 = 0xA4; //设置定时初值TH1 = 0xFF; //设置定时初值Counter++;Counter %= 100;//将Counter刷新为0if(Counter < Compare){Motor = 1;//高电平转}else{Motor = 0;}
}main.c
#include <REGX52.H>
#include "Delay.h"
#include "Nixie.h"
#include "Key.h"
#include "Motor.h"
#include "IR.h"unsigned char Command,Speed;void main(){Motor_Init();IR_Init();while( 1 ){if(IR_GetDataFlag())//如果收到数据帧{Command = IR_GetCommand();//获取遥控器命令码if(Command == IR_0){Speed = 0;} //根据遥控器命令码设置速度if(Command == IR_1){Speed = 1;}if(Command == IR_2){Speed = 2;}if(Command == IR_3){Speed = 3;}if(Speed==0){Motor_SetSpeed(0);}//速度输出if(Speed==1){Motor_SetSpeed(50);}if(Speed==2){Motor_SetSpeed(75);}if(Speed==3){Motor_SetSpeed(100);}}Nixie(1,Speed);}}