概览:
- 通过运动学正解控制机器人运动
- 通过运动学逆解控制机器人运动
- 一个简单的物体搬运(沿轨迹运动)
后续会陆续更新(本例仅供学习交流用)
一、6轴机器人
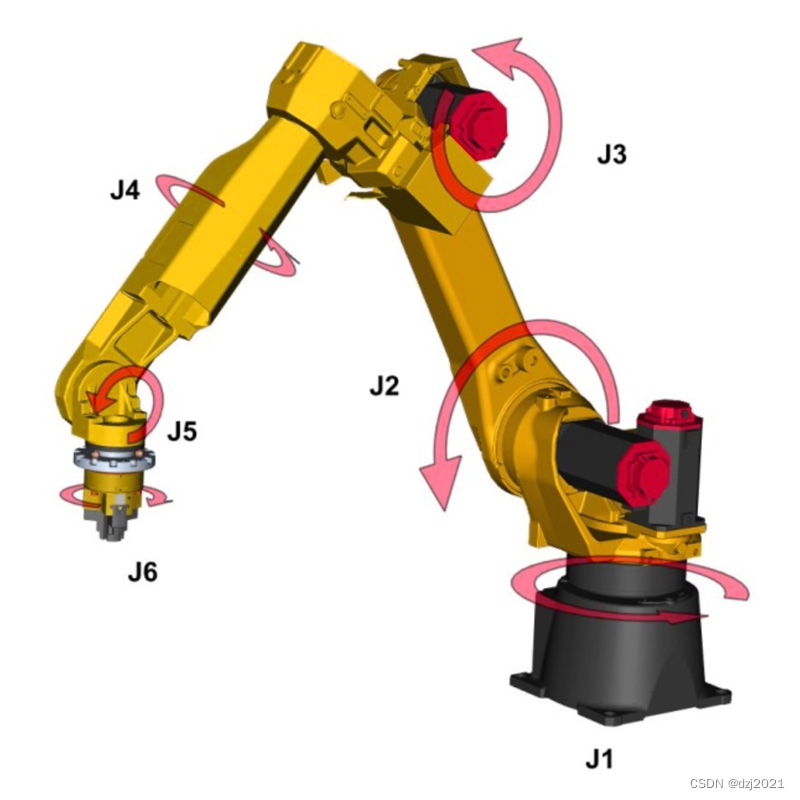
二、运动正解控制
通过修改各个轴的角度,实现末端执行器(TCP)的位姿变换
三、运动逆解控制
指定末端执行器(本例为第六轴的法兰)的位置和姿态,逆向计算各个关节的角度,让他们适应当前的末端位姿信息。
拖拽定位
拖动黄色的滑块,快速把末端位姿定位到指定的position和rotation
四、执行器沿轨迹运行
搬运物体:让末端执行器沿着轨迹搬运