激光雷达反射率定标板如何提取障碍信息
随着信息科技技术的发展,自动驾驶技术在移动机器人等智能移动设备领域得到广泛应用。智能移动设备不仅减少了人力劳动,方便生活,而且提高了工作效率。激光雷达作为自动驾驶技术的核心避障传感器,得到迅速发展。
激光雷达通过对发射和接收的激光信号进行分析计算可以得到目标的距离、方向和速度等信息。激光雷达其工作速度快、分辨率好,在各个领域同样发挥着巨大作用。
激光雷达通过测量激光信号的时间差来确定物体距离,通过水平旋转扫描或者向空扫描角度,以及获取不同俯仰角度的信号,来获得被测物体的精确三维信息。性能冗余和极高的可靠性,满足自动驾驶、轨道交通、城市交通,工业检测等领域的不同需求。由于激光频率高,波长短,所以可以获得极高的角度、距离和速度分辨率,如此高的速度和距离分辨率意味着激光雷达可以利用距离多普勒成像技术获得非常清晰的图像。
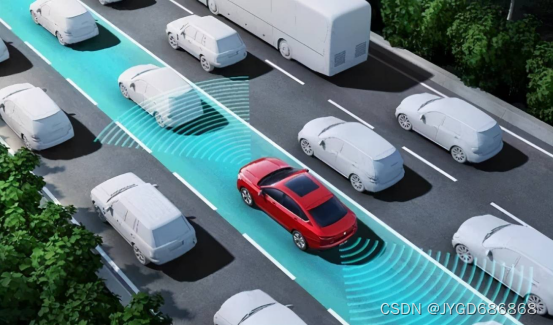
激光雷达障碍物的准确检测是无人驾驶车辆感知的重要组成部分,也是无人驾驶车辆安全行驶的基本保证。考虑到在三维激光雷达获取1帧场景数据时,障碍物可看作是1个均匀的线性运动,理论上获得的点云轮廓特征更精确。激光雷达扫描目标获得的障碍物数据实际上是孤立扫描点的集合,如果对目标的轮廓特征进行分析和提取,首先需要对三维点云数据进行聚类和分割。
基于轮廓特征的障碍物检测方法只适用于场景简单、干扰较小的情况,否则容易误将道路外侧的灌木丛检测为车辆等障碍物。但是,车辆在道路上正常行驶时,只注意道路边界内的情况,不考虑道路边界外的障碍物。因此,障碍物的检测区域可利用道路边界信息进行限制,聚类和剔除感兴趣区域内部的雷达点云数据,有效滤除大部分干扰数据,使障碍物信息提取快速方便,大幅提高算法检测的速度和精度。
激光雷达是高频率的传感器设备,在进行标定数据采集工作的时间内会对相同区域进行多次扫描,因此需要对这一阶段的样本数据求解平均值,以此获得样本总数的统计分布规律,同时减少计算量提升实时性。

景颐光电激光雷达标定板可用于激光雷达的感知目标距离校准,让激光雷达更精准地判断周围故障物及其运动轨迹。常用于激光雷达定标的反射率有10%、50%和90%,如果定标精度要求比较高,还可定制更多的阶梯反射率。