工业机器视觉megauging(向光有光)使用说明书(三,轻量级的visionpro)
下来我们说说第二个相机的添加:
第一步,点击相机二,如下:

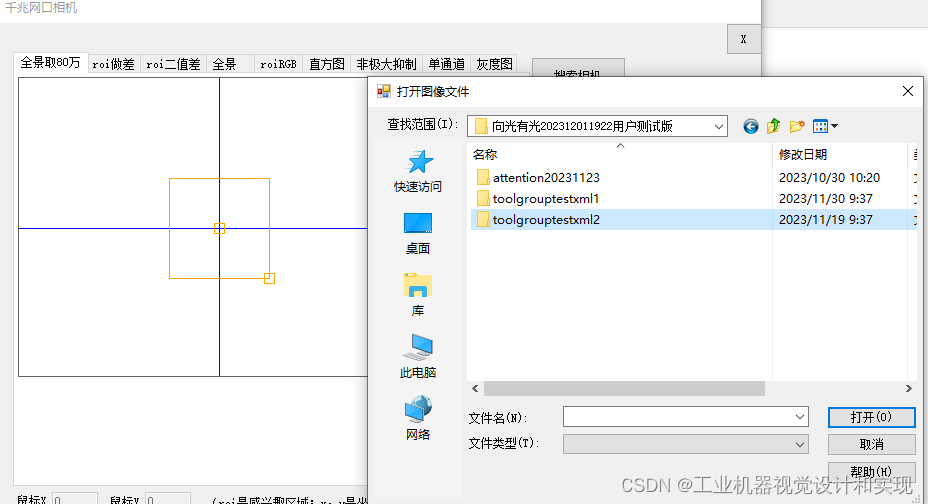
第二步,点击:加载工具组.xml,加载toolgroupxml2目录下的:工具组.xml
注意,一个相机只能用一个toolgroupxml,第一相机使用toolgroupxml1,第二相机使用toolgroupxml2,
如果有第三个相机,可以把toolgroupxml2复制一个,改名为toolgroupxml3给第三相机用,toolgroupxml里头的文件不用改变,在具体使用过程中,才会改变。
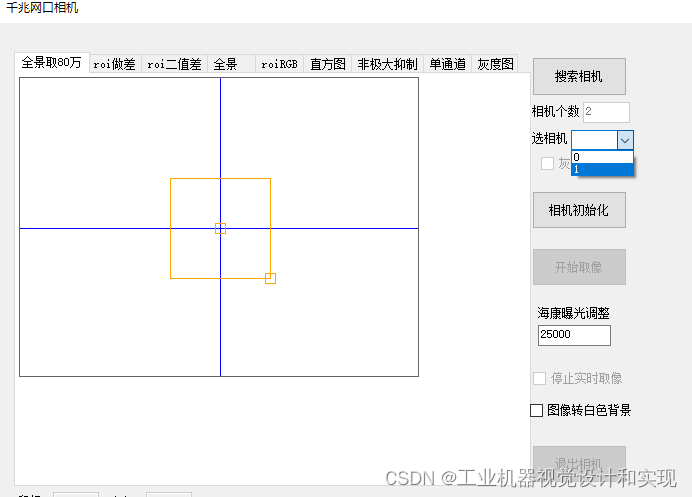
第三步,加载目录‘toolgroupxml2’中文件“工具组.xml”后,点击“搜索相机”,第二个相机选“1”,如果有三个相机,第三个相机选“2”,以此类推,我们也是通过这样区别相机,你现在在第一相机使用下,这个界面再使用第一相机,肯定不行
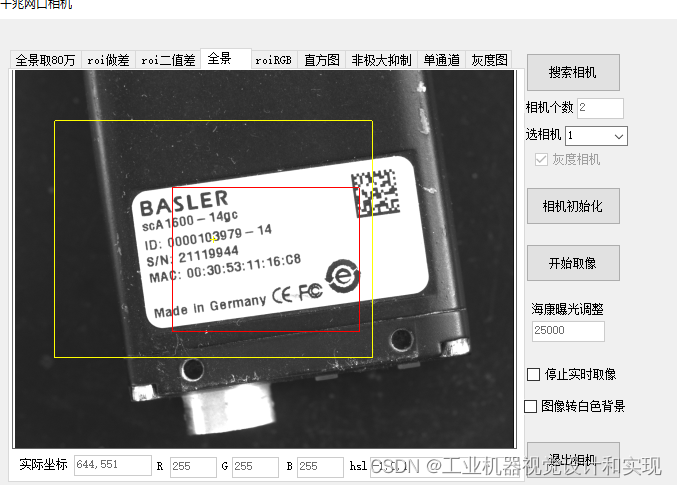
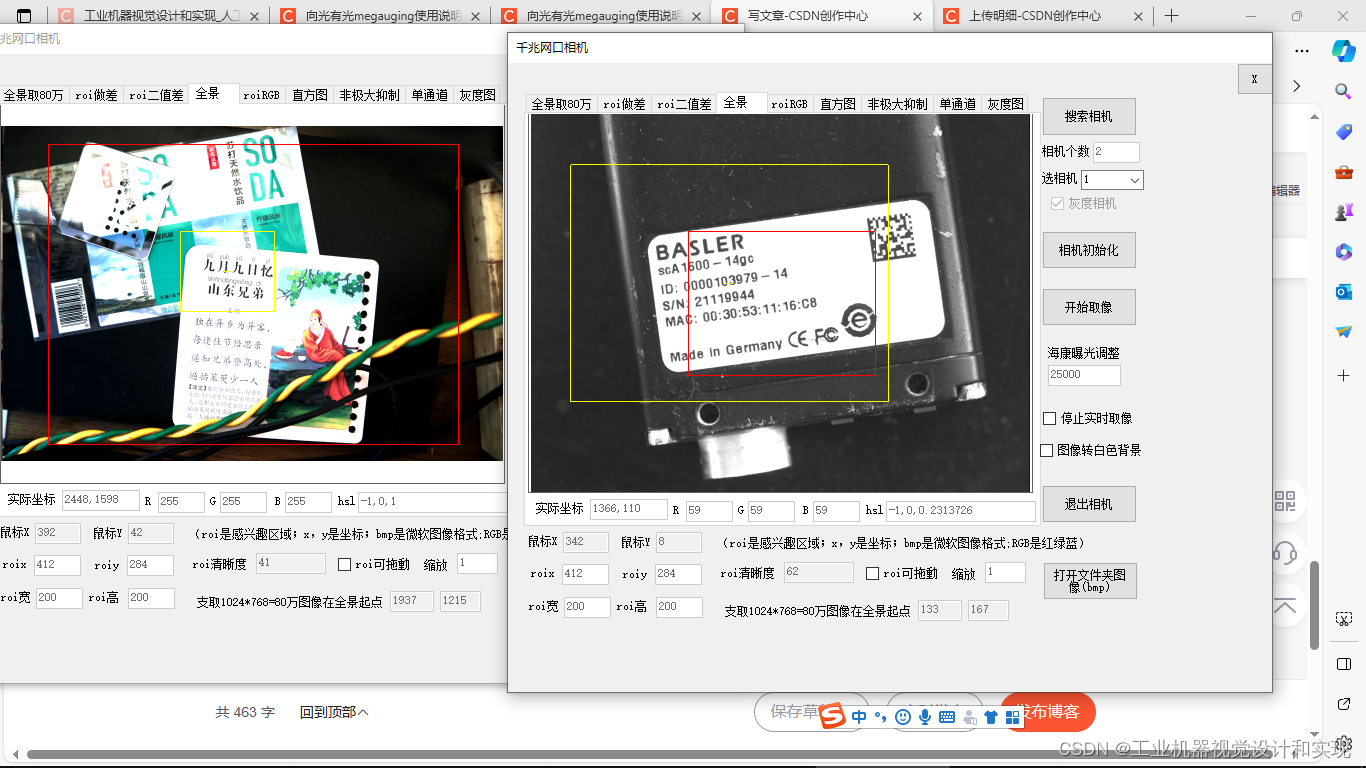
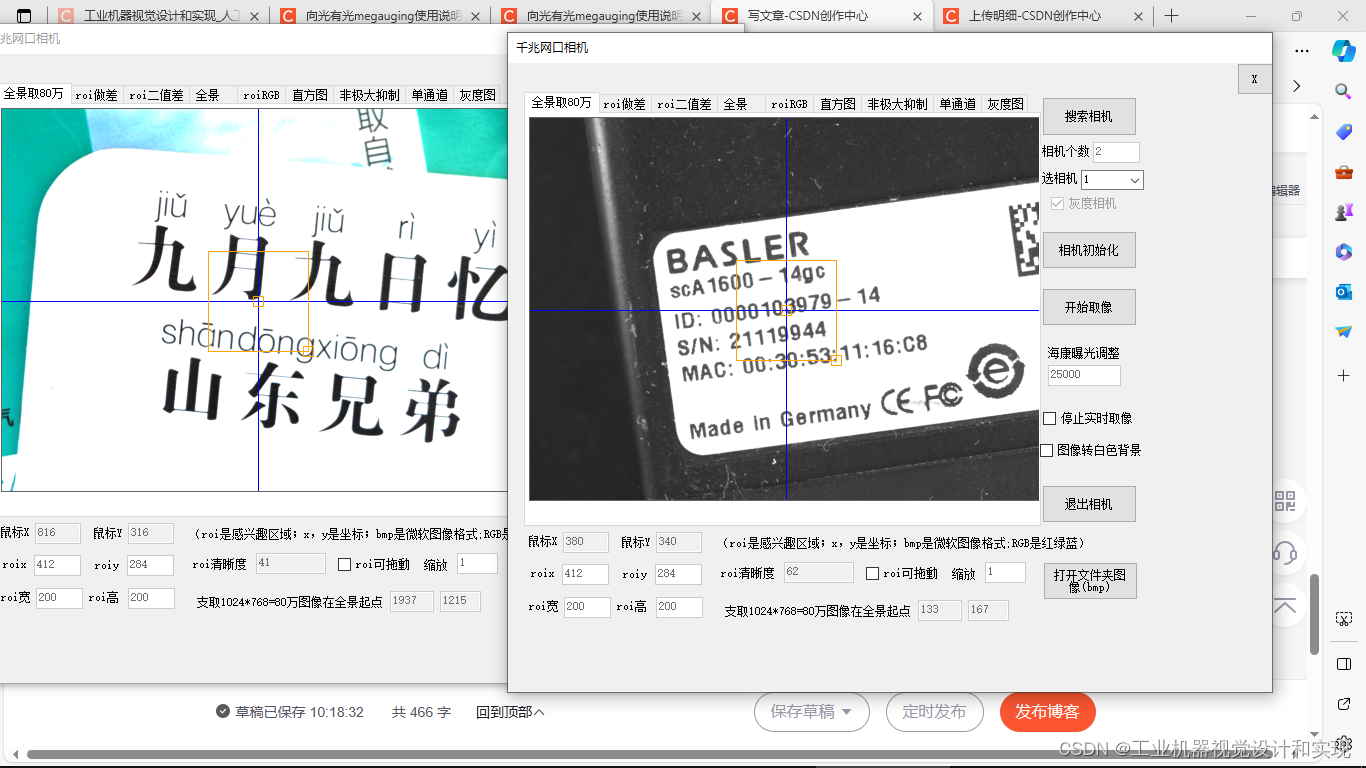
第四步,初始化相机,开始取像,你可以发现,我们的程序,可以自动识别彩色相机和黑白相机。
下面就是我们第二个相机工作时的情形,这个是200万的黑白相机

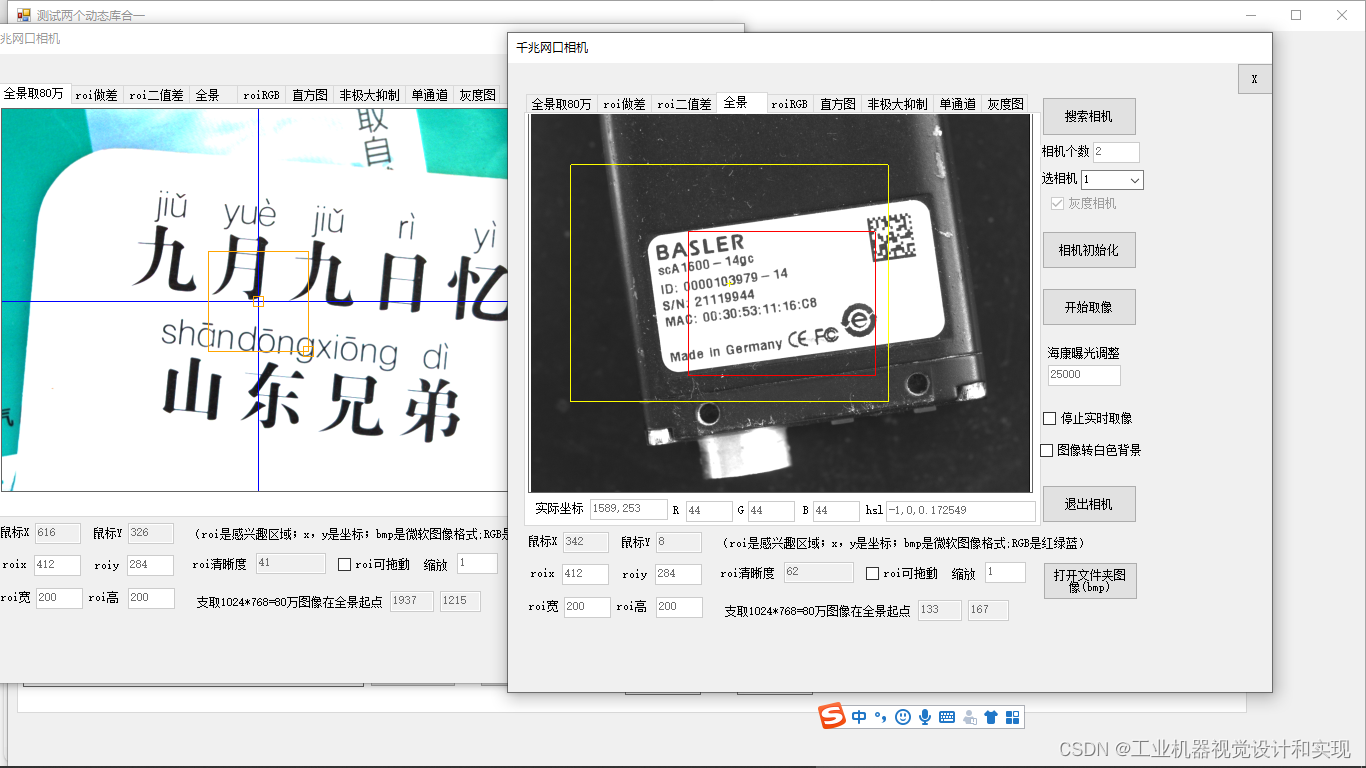
全景如下:
好,我们两个相机一同工作,来个合影:
好,这一节,就介绍到这里,谢谢观看!
如果不方便在csdn下载,734523623@qq.com,可以邮件联系我