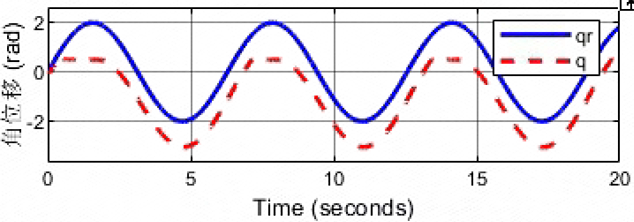
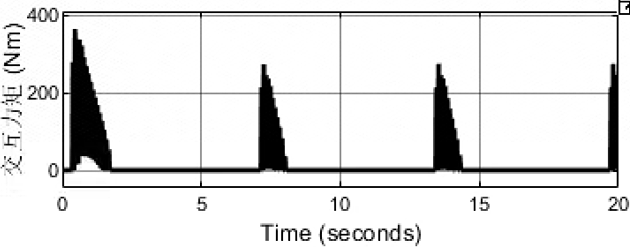
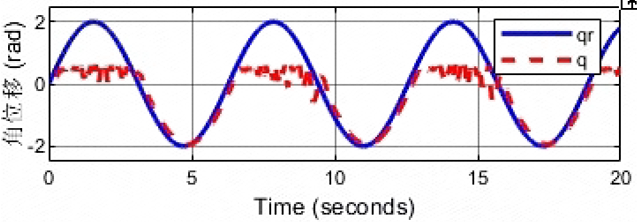
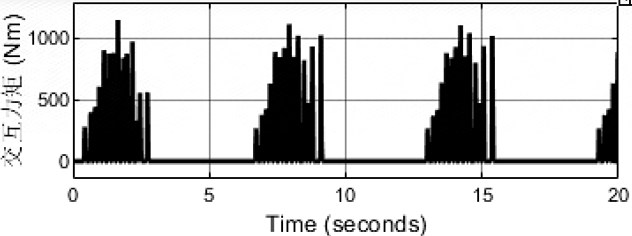
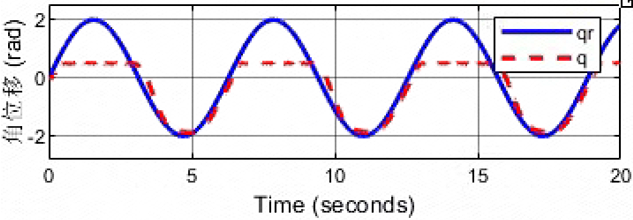
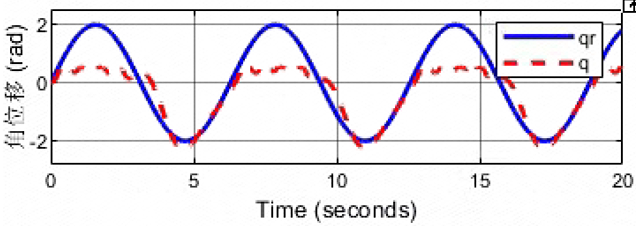
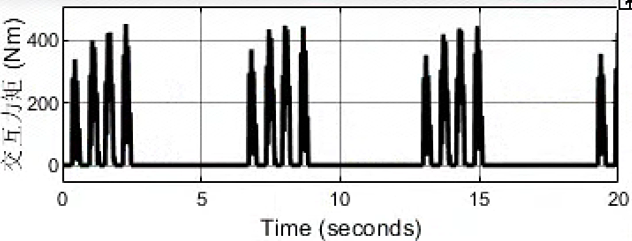
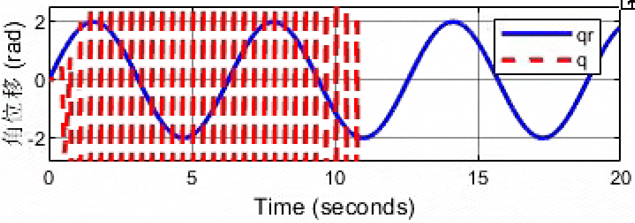
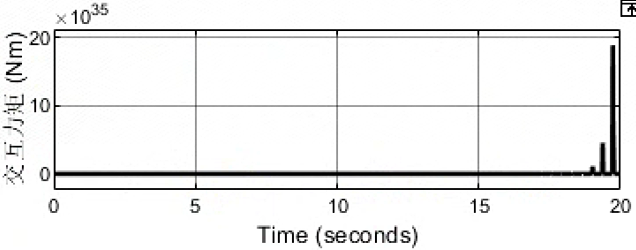
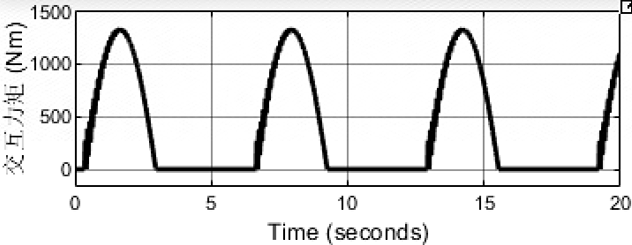
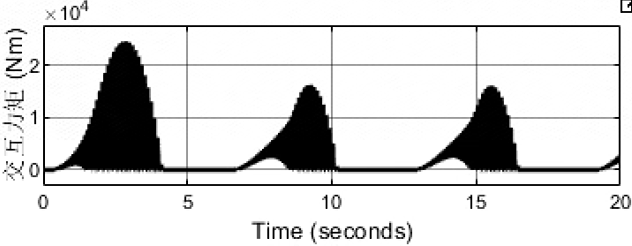
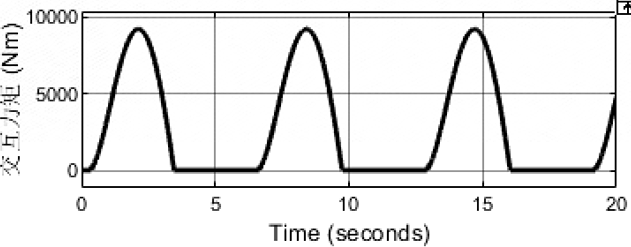
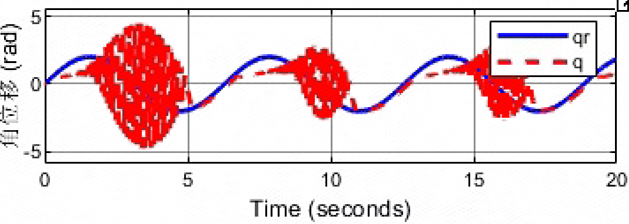
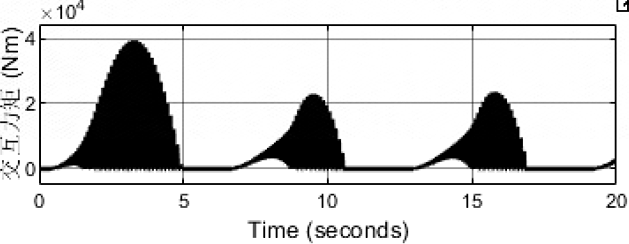
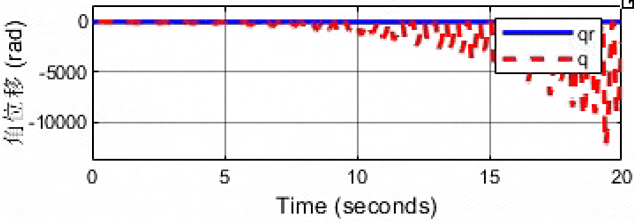
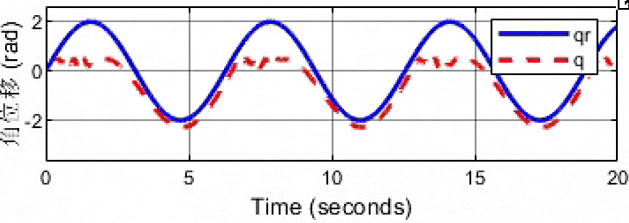
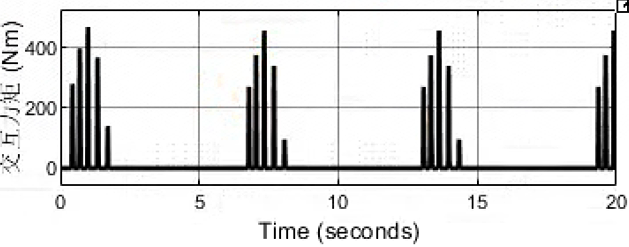
阻抗控制下机器人接触刚性环境振荡不稳定进行阻抗调节
阻抗接触
刚性环境为ke=10000
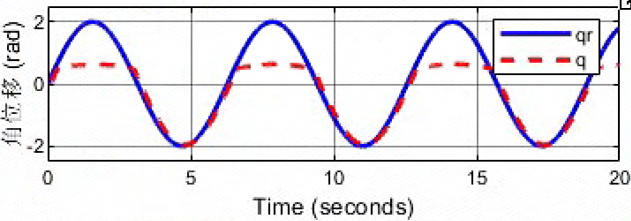
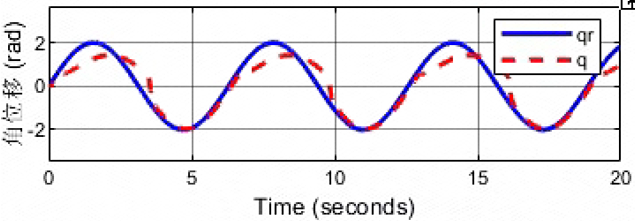
虚拟阻抗为:kd=100,bd=10,md=1
虚拟阻抗为:kd=100,bd=10,md=5

虚拟阻抗为:kd=100,bd=10,md=10
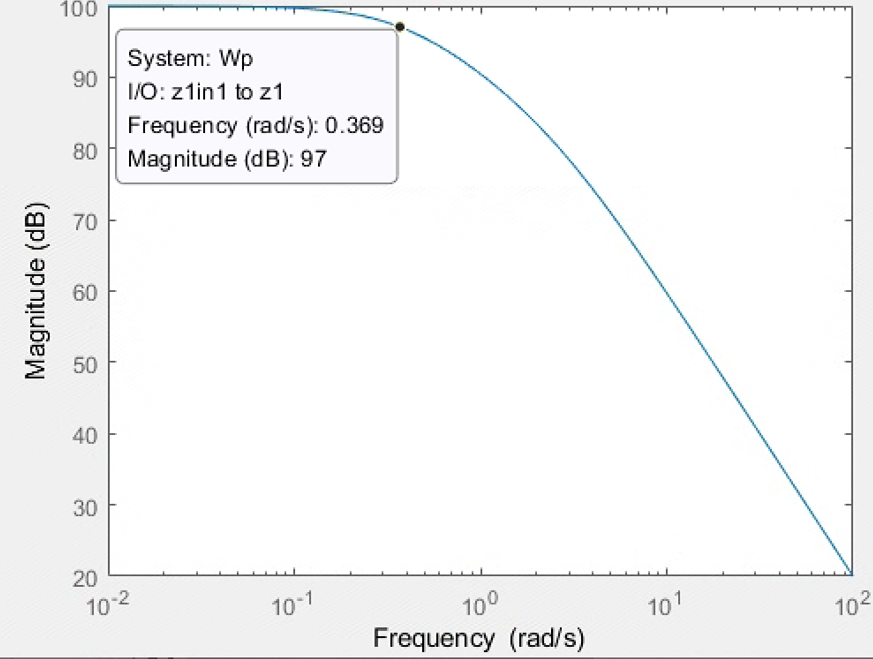
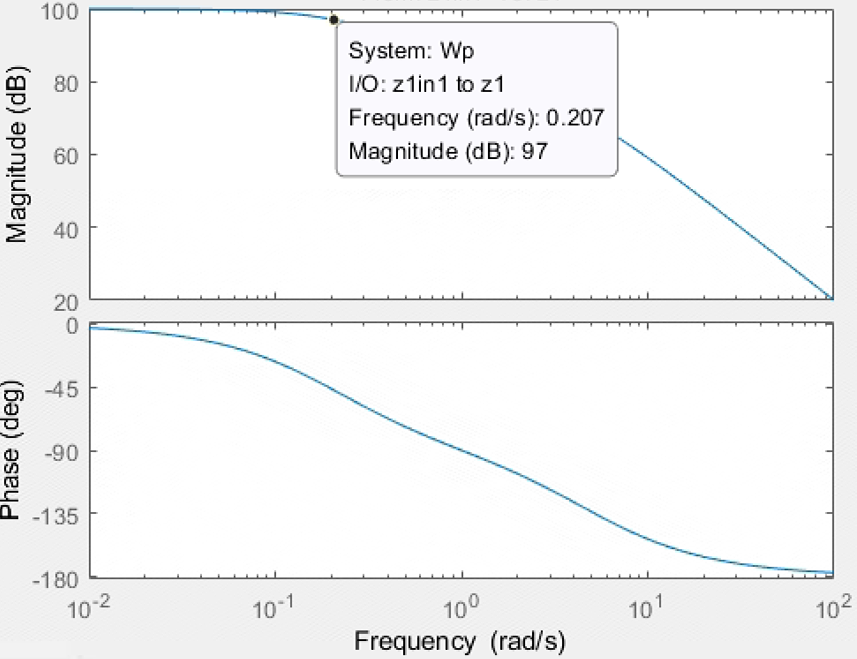
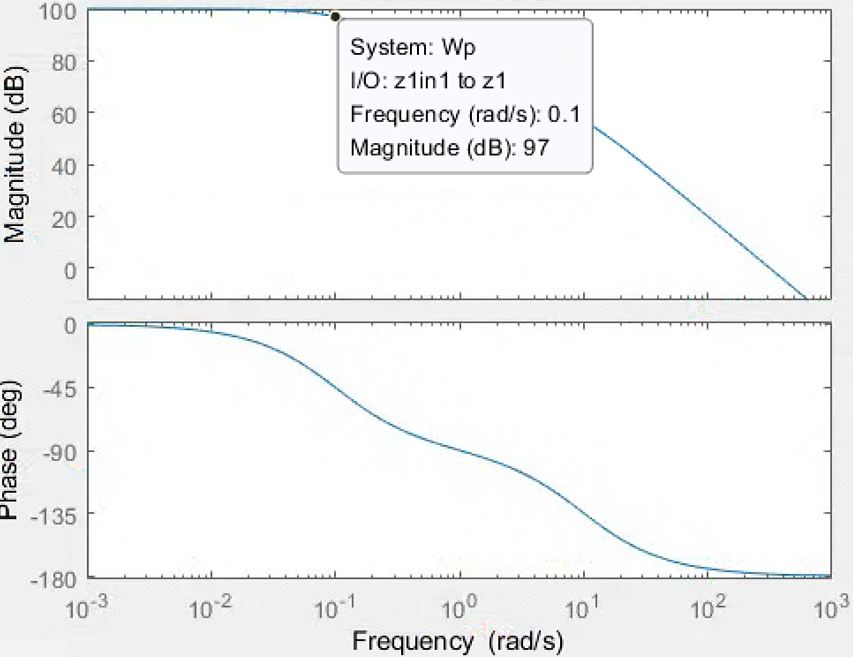
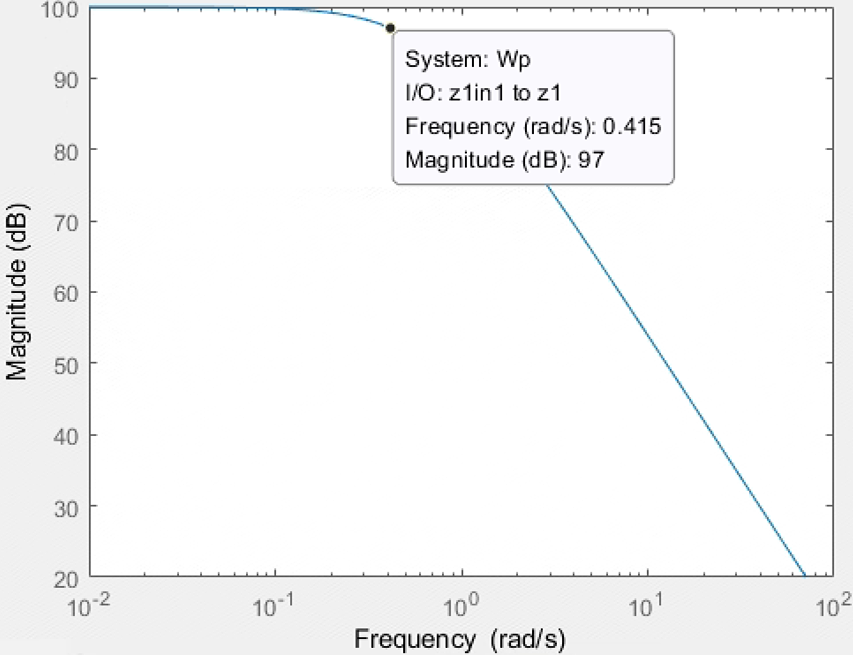
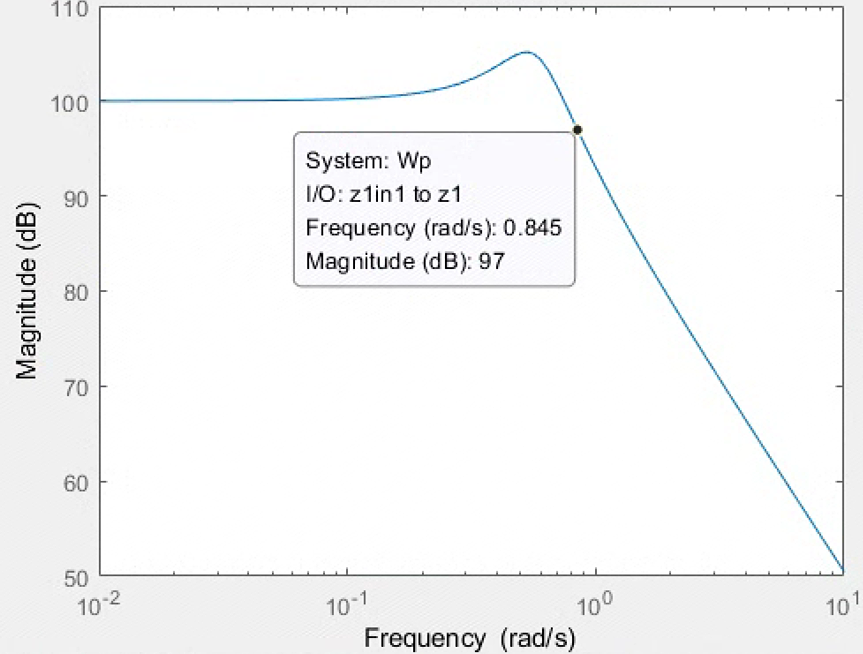
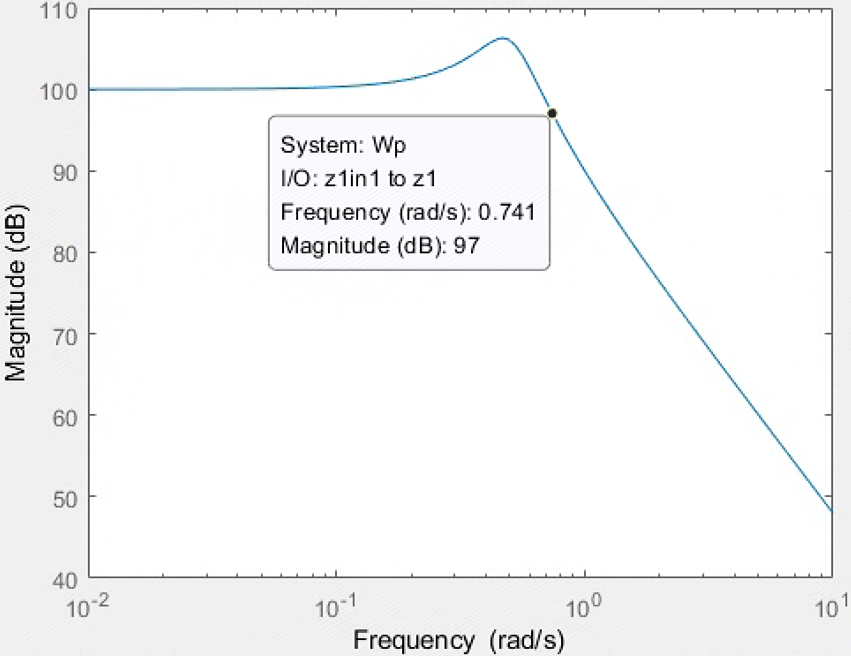
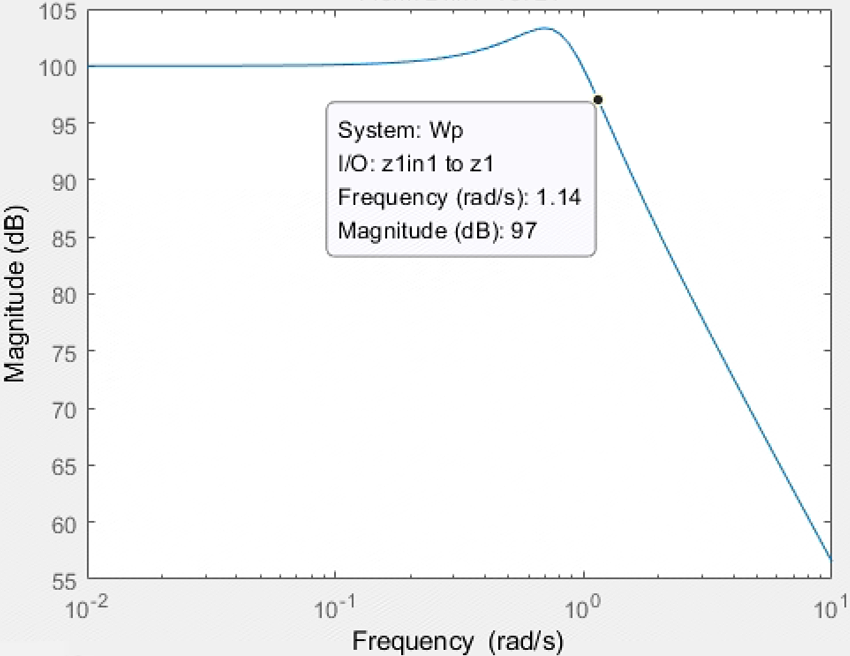
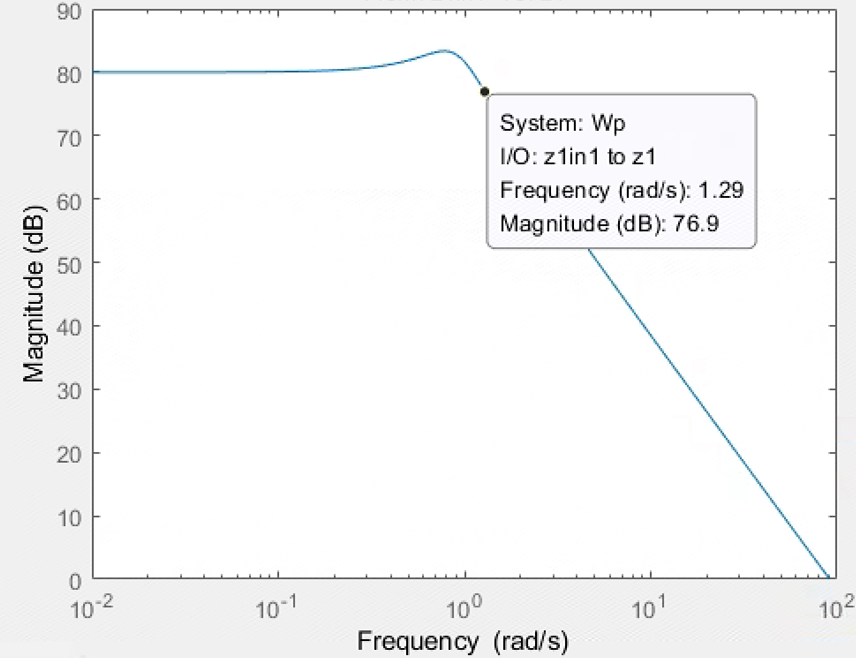
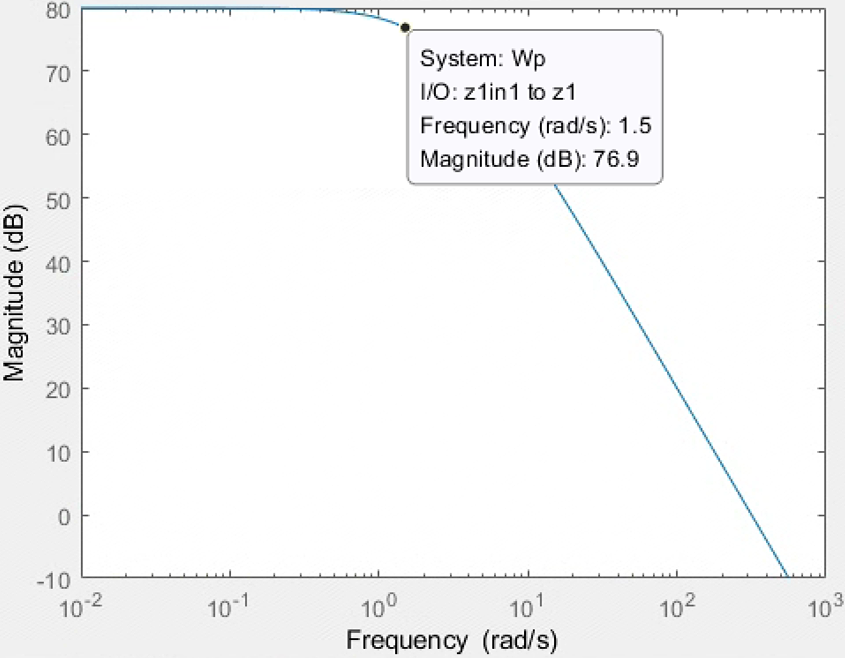
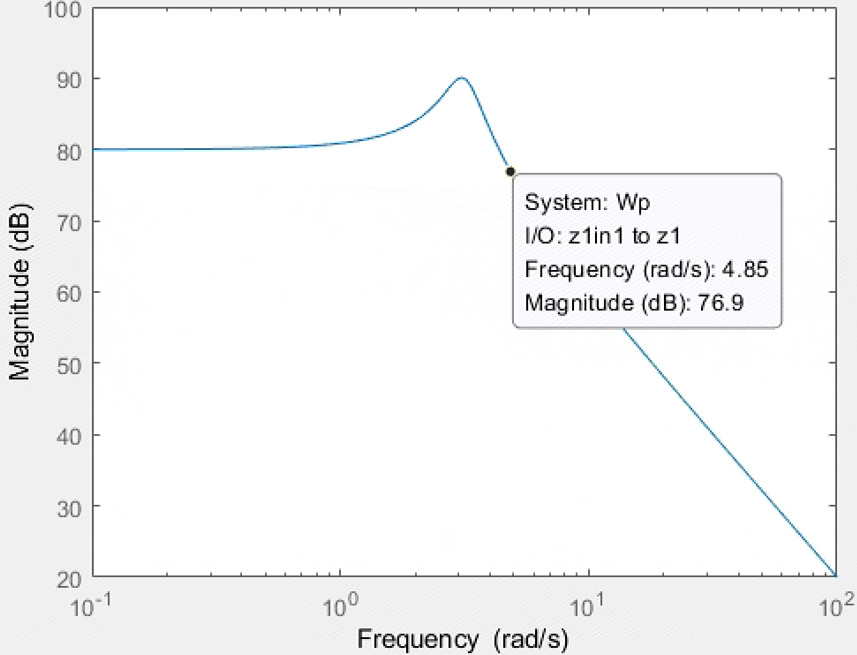
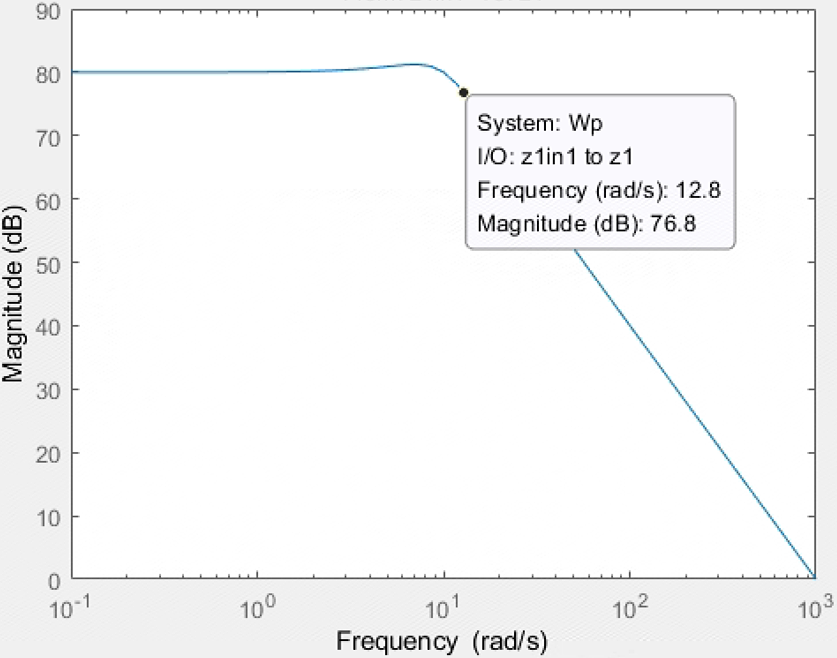
性能滤波函数的Bode图:
bode(1e5/(0.0005*s^2+5*s+1))
bode(5e4/(0.1*s^2+3*s+1))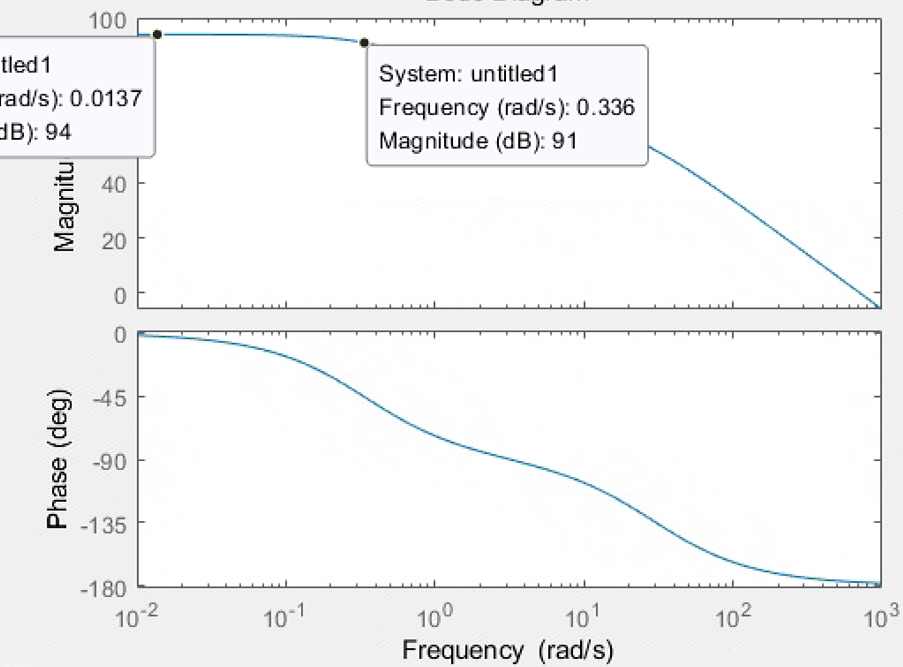
性能低通滤波调参
1e5/(1*s^2+3*s+1)
1e5/(1*s^2+5*s+1)
1e5/(1*s^2+10*s+1)
1e5/(2*s^2+3*s+1)
1e5/(2*s^2+1*s+1)

1e5/(3*s^2+1*s+1)
1e5/(4*s^2+1*s+1)
1e5/(1.5*s^2+0.9*s+1)
1e4/(1.2*s^2+0.8*s+1)
1e4/(0.1*s^2+0.8*s+1)
1e4/(0.1*s^2+0.1*s+1)
1e4/(0.01*s^2+0.1*s+1)
————————————————————————————————————————
低阻抗模式下的刚性接触
纯弹簧接触
kd=10
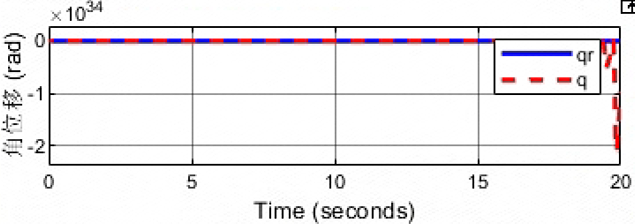
直接发散了!!!
kd=100
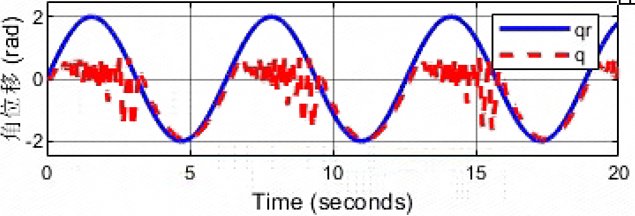
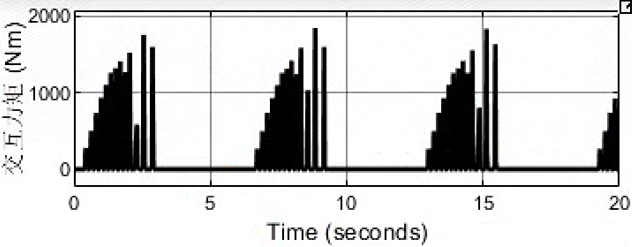
没有发散,但是刚性冲击过程振荡现象较为明显,这不是所期望的!!!
kd=1000
kd=10000

物极必反,刚度过大会引起较大振荡,意思是类似于两个纯刚体进行碰撞,势必会引起较大的振荡!!!
kd=100000
但阻抗实现性能就会很弱!!!
kd=1000000
粘弹性接触
kd=10,bd=1
kd=10,bd=10
说明增大阻尼起到了减小震荡的作用。
kd=10,bd=15

kd=10,bd=20
kd=10,bd=100