计算机视觉 激光雷达结合无监督学习进行物体检测的工作原理
一、简述
激光雷达是目前正在改变世界的传感器。它集成在自动驾驶汽车、自主无人机、机器人、卫星、火箭等中。该传感器使用激光束了解世界,并测量激光击中目标返回所需的时间,输出是点云信息,利用这些信息,我们可以从3D点云中查找障碍物。
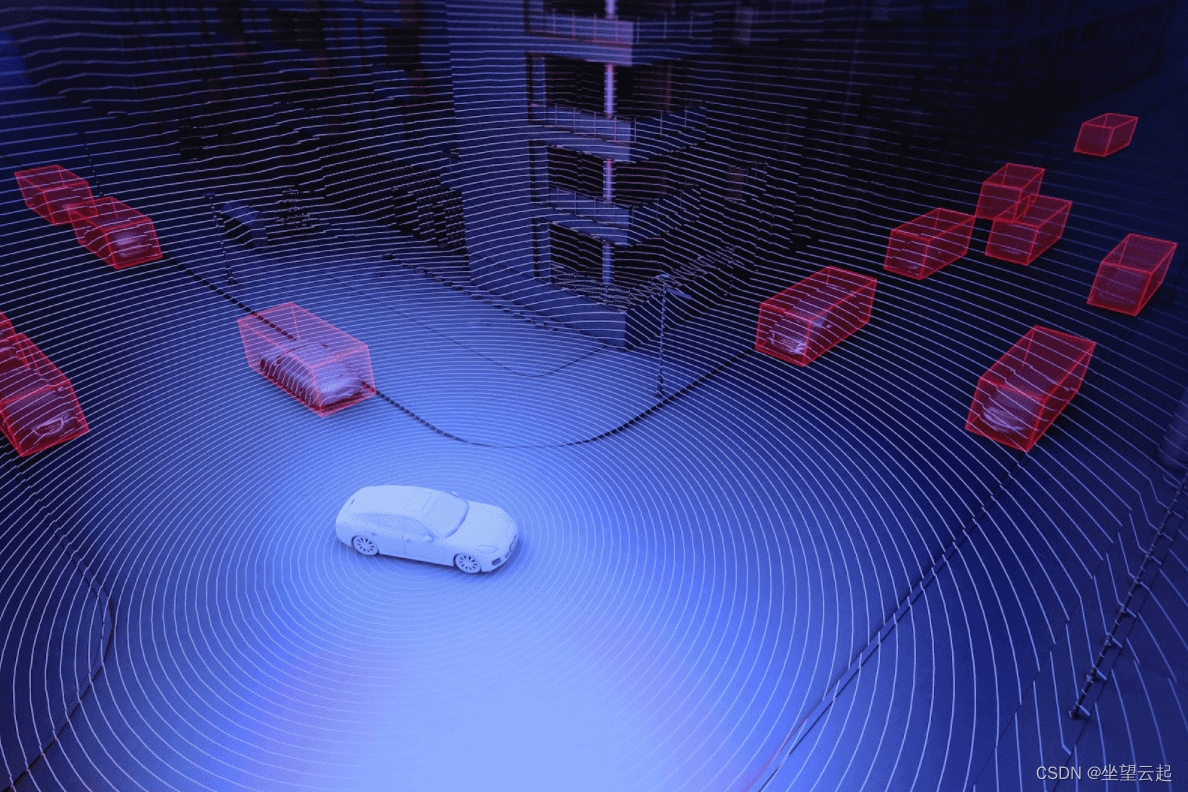
从自动驾驶汽车的角度看激光雷达就类似下面这张图的感觉,得到并处理点云、使用 3D 边界框检测障碍物以及实时分割可驾驶区域。
二、LiDAR — 3D 光传感器
LiDAR 传感器利用光工作。LiDAR 代表光检测和测距。它们可以检测长达 300 米的障碍物并准确估计其位置。在自动驾驶汽车中,这是用于位置估计的最准确的传感器。

LiDAR 传感器由两部分组成:激光发射(顶部)和激光接收(底部)。发射系统通过利用激光束层来