Stm32_标准库_13_串口蓝牙模块_手机与蓝牙模块通信
代码:
#include "stm32f10x.h" // Device header
#include "Delay.h"
#include "OLED.h"
#include "Serial.h"char News[100] = "";uint8_t flag = 1;void Get_Hc05News(char *a){uint32_t i = 0, j = 0;while(j < 10000){//等待中断while(Serial_GetRxFlag() == 1){//获取一个字节//查看标志位并清除News[i] = Serial_GetRxData();//传入数据i ++;j = 0;flag = 0;}j ++;}}int main(void)
{OLED_Init();Serial_Init();//开启串口while(1){Get_Hc05News(News);if(flag == 0){//有数据再输出OLED_ShowString(1, 1, News);flag = 1;}}
}其中 Serial.c
代码:
#include "stm32f10x.h" // Device header
#include <stdio.h>
#include <stdarg.h>
#include "Delay.h"uint8_t TEMP;
uint8_t Serial_RxData;
uint8_t Serial_RxFlag;
GPIO_InitTypeDef GPIO_InitStructu;
USART_InitTypeDef USART_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;void Serial_Init(void)
{RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);GPIO_InitStructu.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_InitStructu.GPIO_Pin = GPIO_Pin_9;GPIO_InitStructu.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructu);GPIO_InitStructu.GPIO_Mode = GPIO_Mode_IPU;GPIO_InitStructu.GPIO_Pin = GPIO_Pin_10;GPIO_InitStructu.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOA, &GPIO_InitStructu);USART_InitStructure.USART_BaudRate = 9600;USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;USART_InitStructure.USART_Mode = USART_Mode_Tx | USART_Mode_Rx;USART_InitStructure.USART_Parity = USART_Parity_No;USART_InitStructure.USART_StopBits = USART_StopBits_1;USART_InitStructure.USART_WordLength = USART_WordLength_8b;USART_Init(USART1, &USART_InitStructure);//中断开启USART_ITConfig(USART1, USART_IT_RXNE, ENABLE);NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//通道NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn;//中断通道NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 1;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 1;NVIC_Init(&NVIC_InitStructure);USART_Cmd(USART1, ENABLE);
}void Serial_SendByte(uint8_t Byte)//传递数据至TDR
{USART_SendData(USART1, Byte);while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
}void Serial_SendArray(uint8_t *Array, uint16_t Length)//传数组
{uint16_t i;for (i = 0; i < Length; i ++){Serial_SendByte(Array[i]);}
}void Serial_SendString(char *String)//传字符串
{uint8_t i;for (i = 0; String[i] != '\0'; i ++){Serial_SendByte(String[i]);}
}uint32_t Serial_Pow(uint32_t X, uint32_t Y)//pow函数
{uint32_t Result = 1;while (Y --){Result *= X;}return Result;
}void Serial_SendNumber(uint32_t Number, uint8_t Length)//传递无符号数字
{uint8_t i;for (i = 0; i < Length; i ++){Serial_SendByte(Number / Serial_Pow(10, Length - i - 1) % 10 + '0');}
}int fputc(int ch, FILE *f)
{Serial_SendByte(ch);return ch;
}void Serial_Printf(char *format, ...)
{char String[100];va_list arg;va_start(arg, format);vsprintf(String, format, arg);va_end(arg);Serial_SendString(String);
}uint8_t Serial_GetRxFlag(void)//读取标志位后自动青除
{if (Serial_RxFlag == 1){Serial_RxFlag = 0;return 1;}return 0;
}void Serial_GetRxFlag_SET(void){Serial_RxFlag = 1;
}
uint8_t Serial_GetRxData(void)//返回一个字节
{TEMP = Serial_RxData;//Serial_RxData = '#';//消除传输数据return TEMP;
}void USART1_IRQHandler(void)//中断函数
{if (USART_GetITStatus(USART1, USART_IT_RXNE) == SET){Serial_RxData = USART_ReceiveData(USART1);//读数据Serial_SendByte(Serial_RxData);Serial_RxFlag = 1;USART_ClearITPendingBit(USART1, USART_IT_RXNE);}
}Serial.h
代码:
#ifndef __SERIAL_H
#define __SERIAL_H
#include "stm32f10x.h"
#include <stdio.h>void Serial_Init(void);
void Serial_SendByte(uint8_t Byte);
void Serial_SendArray(uint8_t *Array, uint16_t Length);
void Serial_SendString(char *String);
void Serial_SendNumber(uint32_t Number, uint8_t Length);
void Serial_Printf(char *format, ...);uint8_t Serial_GetRxFlag(void);
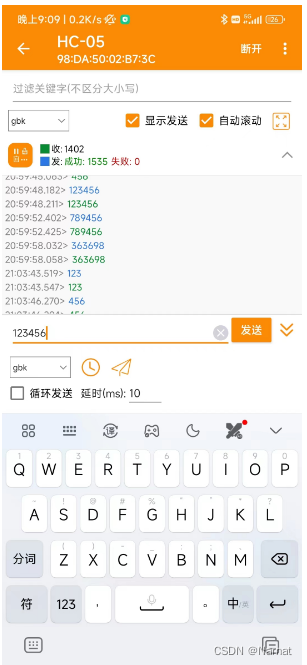
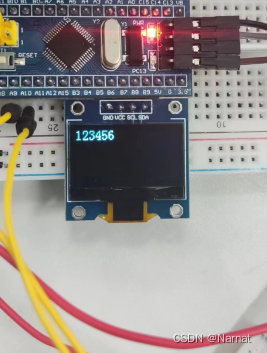
uint8_t Serial_GetRxData(void);void Serial_GetRxFlag_SET(void);#endif效果: