机器人控制算法——两轮差速驱动运动模型
1.Introduction
本文主要介绍针对于两轮差速模型的逆运动学数学推导。因为在机器人控制领域,决策规划控制层给执行器输出的控制指令v(车辆前进速度)和w(角速度),因此,我们比较关心,当底层两个驱动电机接收到此信息,如何将v和w转换成左轮速度V1和右轮速度V2。
2.Algorithm
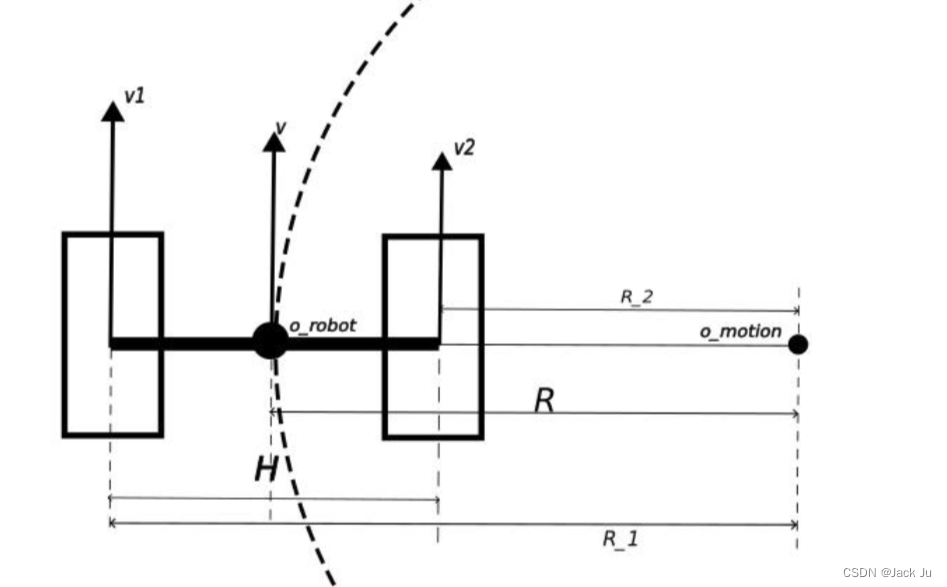
如上图,是两轮差速模型,我们考虑左轮V1!= V2,的情况。
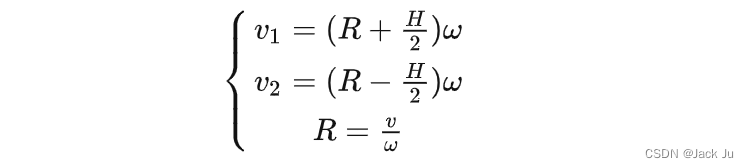
当机器人绕远处O_mation圆心,做圆周运动机器人作圆弧运动,此时有:

我们根据上述公式,给出两轮差速模型的逆运动学数学推导,将v和w转换成左轮速度V1和右轮速度V2。
需要指出的是,此公式也包含了曲率信息,曲率C = 1/R,此曲率值,可以用于大曲率路径的前馈补偿。
至此,我们给出了两轮差速模型的逆运动学数学推导,即如何将v和w转换成左轮速度V1和右轮速度V2。
3.Reference
- 两轮差速驱动运动模型
- Differential-Drive Mobile Robot Control Design based-on
Linear Feedback Control Law