当前位置: 首页 > news >正文 KUKA机器人如何强制输出或取消数字IO信号? news 2025/7/22 14:11:21 KUKA机器人如何强制输出或取消数字IO信号? 具体的操作方法和步骤可参考以下内容: 如下图所示,点击菜单—显示—输入/输出端, 如下图所示,选择想要查看的信号,这里以数字输出端为例进行说明, 如下图所示,此时可以看到输出端信号的编号、名称和当前值,可以通过下拉滚动条向下翻页查看其他的输出信号, 当我们想要强制输出某个DO时,只需要选中该DO信号,然后按住示教器背后的安全开关,最后点击“值”按钮(如果此时发现“值”按钮为灰色,不可操作,则说明当前登录的是操作员账号,此时需要重新登录管理员账号,默认密码:KUKA),即可将该DO信号强制置位为1,如下图所示,置位后,指示灯变为绿色, 查看全文 http://www.lryc.cn/news/190380.html 相关文章: 利用正则表达式进行数据采集和处理 javaScript:拖拽效果 【Unity3D编辑器开发】Unity3D中制作一个可以随时查看键盘对应KeyCode值面板,方便开发 VUE echarts 柱状图、折线图 双Y轴 显示 Django开发之基础篇 在 centos7 上安装Docker 基于SpringBoot的大学城水电管理系统 微信小程序 movable-view 控制长按才触发拖动 轻轻滑动页面正常滚动效果 mysql面试题27:数据库中间件了解过吗?什么是sharding jdbc、mycat,并且讲讲怎么使用? DBCO Sata650,二苯并环辛烷Sata650,Seta-650-DBCO JFLASH基本使用总结 具身智能(Embodied AI) C语言的文件写入、读取 CART 算法——决策树 CF1877A Goals of Victory 018-第三代软件开发-整体介绍 储存数据文本json的读写 Java之动态代理的详细解析 github Release 下载加速,绿色合法,遥遥领先 RabbitMQ消息中间件概述 12V手电钻保护板如何接线演示 基于SpringBoot的教学辅助平台 Qt 读写数据流文件(转 CppGuiProgrammingWithQt4) Pygame中将鼠标形状设置为图片2-2 GPU 基础知识整理 stable diffusion API接口 + 扩展接口 MySQL数据库基本操作和完整性约束类型详解 unity2022版本 实现加减进度条 COCO数据集中图像的caption读取到txt文件 再谈Java泛型
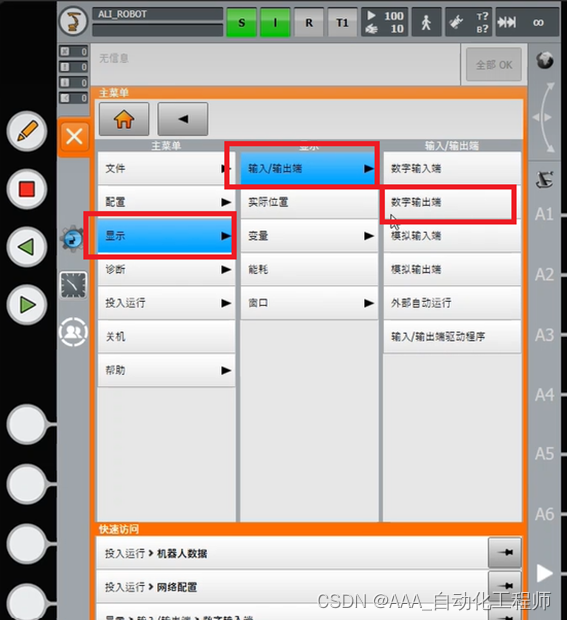
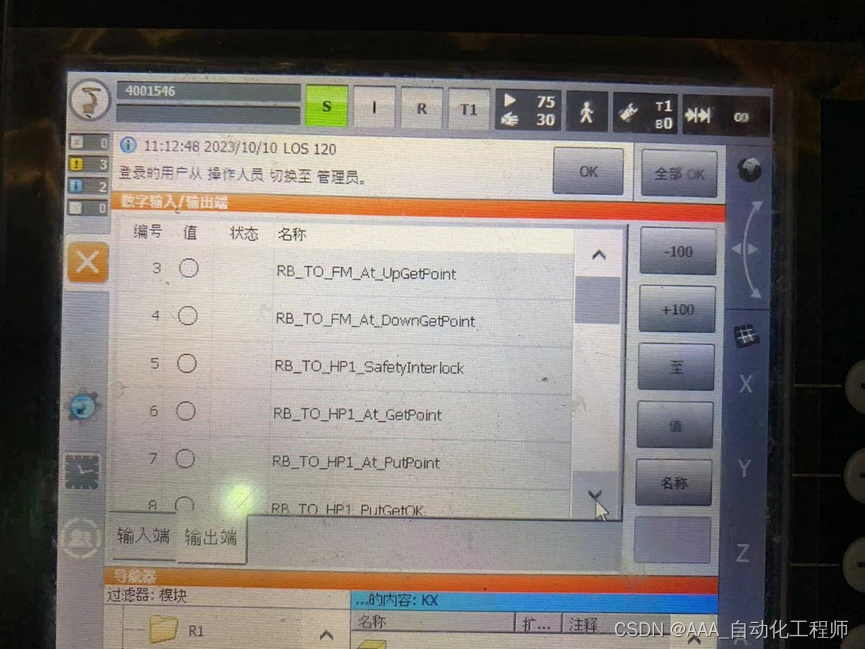
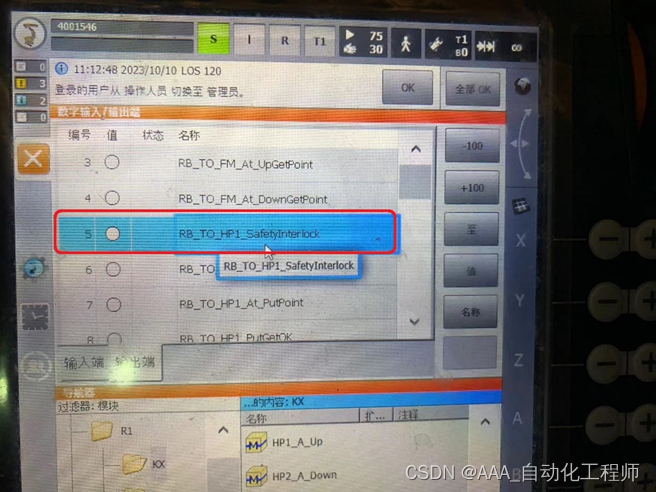
KUKA机器人如何强制输出或取消数字IO信号? 具体的操作方法和步骤可参考以下内容: 如下图所示,点击菜单—显示—输入/输出端, 如下图所示,选择想要查看的信号,这里以数字输出端为例进行说明, 如下图所示,此时可以看到输出端信号的编号、名称和当前值,可以通过下拉滚动条向下翻页查看其他的输出信号, 当我们想要强制输出某个DO时,只需要选中该DO信号,然后按住示教器背后的安全开关,最后点击“值”按钮(如果此时发现“值”按钮为灰色,不可操作,则说明当前登录的是操作员账号,此时需要重新登录管理员账号,默认密码:KUKA),即可将该DO信号强制置位为1,如下图所示,置位后,指示灯变为绿色, 查看全文 http://www.lryc.cn/news/190380.html 相关文章: 利用正则表达式进行数据采集和处理 javaScript:拖拽效果 【Unity3D编辑器开发】Unity3D中制作一个可以随时查看键盘对应KeyCode值面板,方便开发 VUE echarts 柱状图、折线图 双Y轴 显示 Django开发之基础篇 在 centos7 上安装Docker 基于SpringBoot的大学城水电管理系统 微信小程序 movable-view 控制长按才触发拖动 轻轻滑动页面正常滚动效果 mysql面试题27:数据库中间件了解过吗?什么是sharding jdbc、mycat,并且讲讲怎么使用? DBCO Sata650,二苯并环辛烷Sata650,Seta-650-DBCO JFLASH基本使用总结 具身智能(Embodied AI) C语言的文件写入、读取 CART 算法——决策树 CF1877A Goals of Victory 018-第三代软件开发-整体介绍 储存数据文本json的读写 Java之动态代理的详细解析 github Release 下载加速,绿色合法,遥遥领先 RabbitMQ消息中间件概述 12V手电钻保护板如何接线演示 基于SpringBoot的教学辅助平台 Qt 读写数据流文件(转 CppGuiProgrammingWithQt4) Pygame中将鼠标形状设置为图片2-2 GPU 基础知识整理 stable diffusion API接口 + 扩展接口 MySQL数据库基本操作和完整性约束类型详解 unity2022版本 实现加减进度条 COCO数据集中图像的caption读取到txt文件 再谈Java泛型