Adams齿轮副

1.运动副
添加旋转副的时候,必须先物体后公共part(即此处的ground),最后再选择质心点
2.啮合点
啮合点marker的z轴必须是齿轮分度圆的切线方向
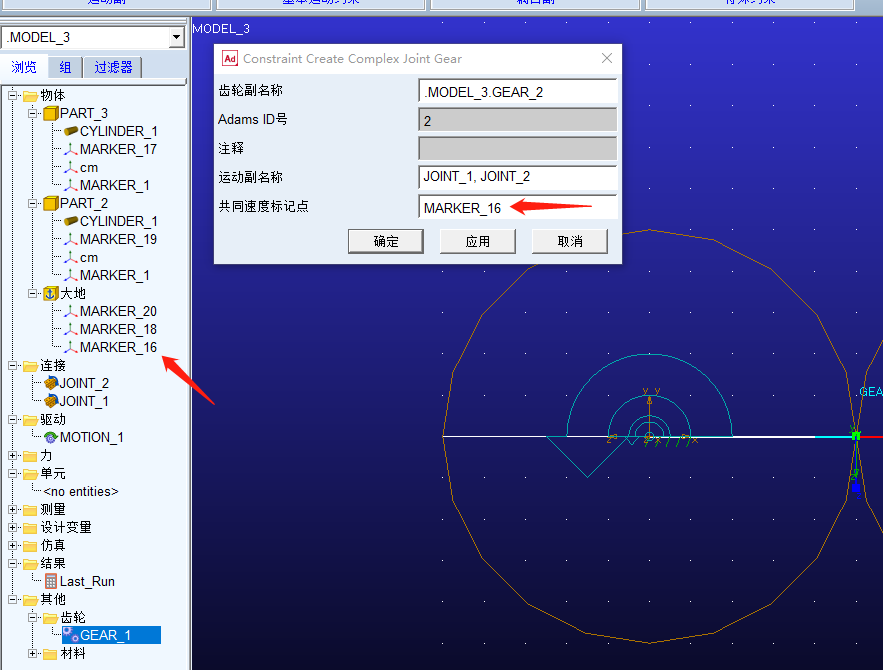
3.啮合点
两齿轮的旋转副,和啮合点,即cv marker ,必须属于同一parts,即ground
1.运动副
添加旋转副的时候,必须先物体后公共part(即此处的ground),最后再选择质心点
2.啮合点
啮合点marker的z轴必须是齿轮分度圆的切线方向
3.啮合点
两齿轮的旋转副,和啮合点,即cv marker ,必须属于同一parts,即ground