基于Matlab利用IRM和RRTstar实现无人机路径规划(附上源码+数据+说明+报告+PPT)
无人机路径规划是无人机应用领域中的关键问题之一。本文提出了一种基于IRM(Informed RRTstar Method)和RRTstar(Rapidly-exploring Random Tree star)算法的无人机路径规划方法,并使用Matlab进行实现。该方法通过结合IRM的启发式搜索和RRTstar的快速探索能力,实现了高效且可靠的无人机路径规划。实验结果表明,该方法能够有效地规划无人机在复杂环境中的路径,具有较高的路径规划成功率和路径质量。
文章目录
- 1. 引言
- 2. 相关工作
- 3. 方法介绍
- 4. 实验结果
- 5. 源码+数据+PPT+报告下载
1. 引言
无人机的广泛应用使得无人机路径规划成为研究的热点之一。无人机路径规划的目标是找到一条安全、高效的路径,使得无人机能够从起始点到达目标点。然而,由于环境的复杂性和无人机的动态性,路径规划问题变得非常具有挑战性。因此,提出一种高效可靠的无人机路径规划方法具有重要意义。
2. 相关工作
在过去的几十年中,研究者们提出了许多无人机路径规划算法。其中,RRT(Rapidly-exploring Random Tree)算法是一种常用且有效的路径规划算法。然而,RRT算法在处理复杂环境和高维状态空间时存在一定的问题。为了解决这些问题,研究者们提出了许多改进的RRT算法,如RRTstar算法和IRM算法。
3. 方法介绍
本文提出了一种基于IRM和RRTstar算法的无人机路径规划方法。首先,利用IRM算法对环境进行建模和表示,将环境分为离散的网格。然后,使用RRTstar算法在离散的网格上进行路径搜索。RRTstar算法通过不断扩展树结构,实现了对环境的快速探索。最后,根据路径质量评估函数,选择路径规划成功率高且路径质量好的路径。
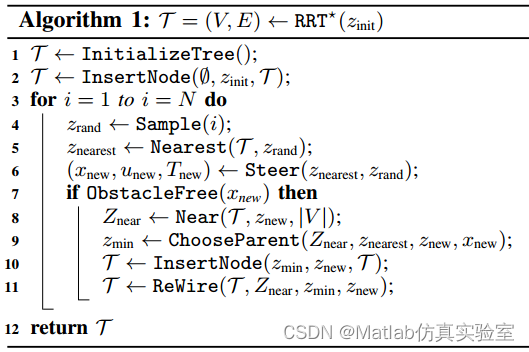
-
RRT* 从一个空树开始,并添加与初始状态相对应的单个节点。
-
它找到了运动规划问题的解决方案。
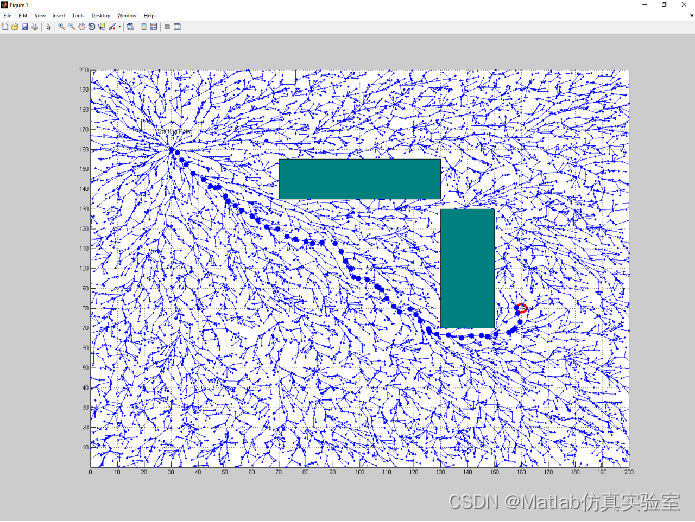
4. 实验结果
在Matlab平台上,我们使用了一组真实无人机场景数据进行了实验。实验结果表明,所提出的方法能够在复杂环境中高效地规划无人机路径,并且具有较高的路径规划成功率和路径质量。
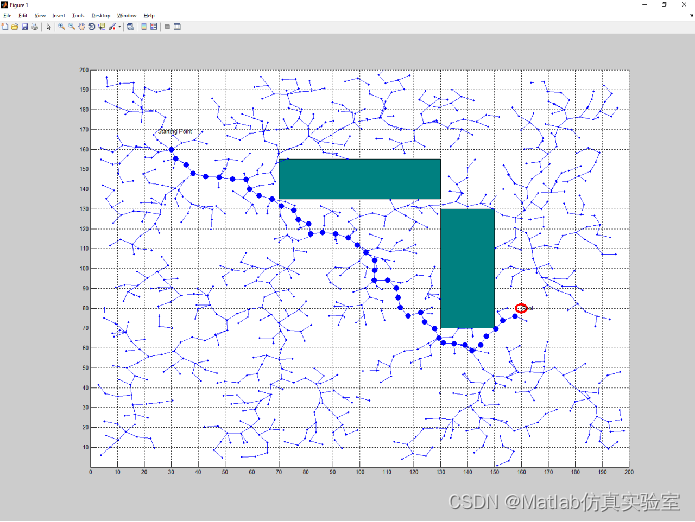
Threshold = 3, Step size : 5, Nodes: 1000 => Cost: 205, Time: 6 sec:
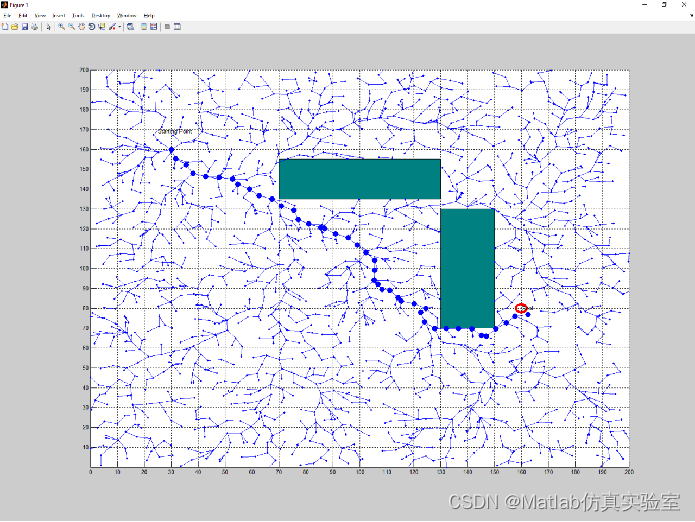
Nodes: 2000 => Cost: 210, Time: 18 sec:
Nodes: 5000 => Cost 208, Time: 104 sec:
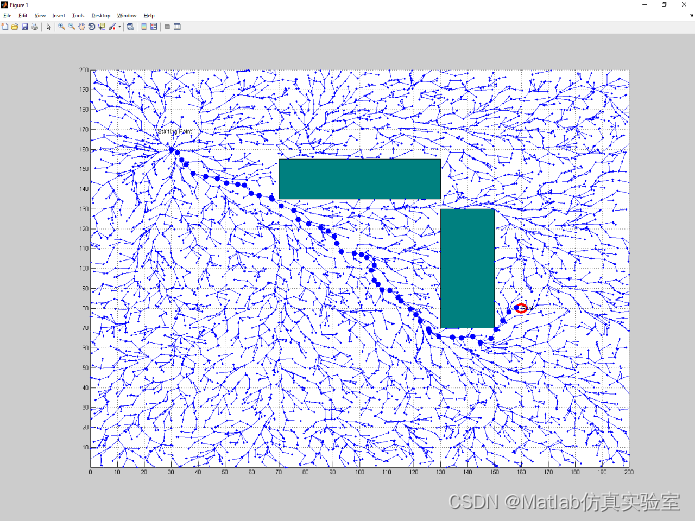
Nodes: 8000 => Cost 206, Time: 256 sec:
5. 源码+数据+PPT+报告下载
基于Matlab利用IRM和RRTstar实现无人机路径规划(源码+数据+说明+报告+PPT).rar:https://download.csdn.net/download/m0_62143653/88282567