激光雷达 01 线数
一、线数
对于 360° 旋转式和一维转镜式架构的激光雷达来说,有几组激光收发模块,垂直方向上就有几条线,被称为线数。这种情况下,线数就等同于激光雷达内部激光器的数量[参考]。
通俗来讲,线数越高,激光器的数量就越多,激光雷达的综合性能也就越强大。让我们来直观地对比一下不同线数激光雷达的点云效果,就很容易理解了:
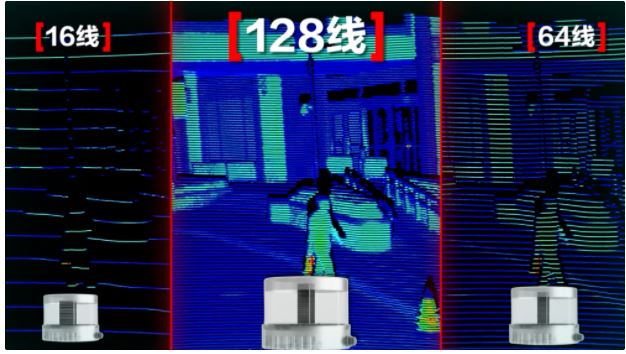
很明显,当激光雷达线数越多时,能捕捉到的物体细节越丰富,也就是分辨率更高。正如上图中,128 线激光雷达形成的点云图明显更清晰,分辨率远远超过低线数激光雷达。
虽然线数越多,效果越好。但如果在一个激光雷达内部垂直堆积 128 组激光收发模块,将会导致激光雷达的体积非常庞大,而且成本极高,根本无法实现大规模量产。
目前激光雷达行业最前沿的芯片化技术,已经能够将 128 组激光收发模块集成到几颗厘米级的芯片上。这样一来,一台“真 128 线”的激光雷达也可以变得十分小巧,轻松集成进车身了。
那么一个 128 线的激光雷达都有哪些好处呢?
线数越多,看得越清。线数越多,越安全。
128 线的激光雷达扫描图案看起来整齐且清晰,而且全局都保持均匀的高分辨率。不论是汽车、行人,还是轮胎、锥桶等容易忽略的细节,都能被激光雷达准确完整地捕捉,确保驾驶系统做最准确的决策,避免危险的发生。
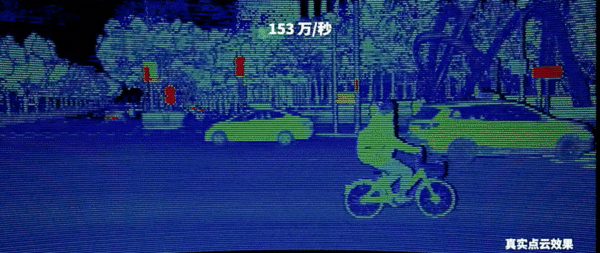
不仅如此,激光器数量越多,可以提供更高的安全冗余。因为 128 个激光器独立工作,即便其中一个出现极小概率的失效问题,也不会对激光雷达的整体感知能力造成什么影响。
总结一下:在 360° 旋转式和一维转镜式架构中,激光雷达的线数就等于激光器的数量,的确是越多越好。
此外,在二维扫描架构中,还会看到“等效xx线”这个概念。“等效”线数,其实就是用少量激光器,通过高速二维扫描来实现类似高线数的扫描效果,实际上内部并没有那么多根“线”。而现在行业里对于“等效”线数尚未形成一个严格的定义,因此不展开讨论。
随着激光雷达芯片化技术的不断迭代发展,未来高线数、高性能的激光雷达将会变得越来越小巧,成本也会持续降低,成为更多智能汽车的“标配”。