【雕爷学编程】Arduino动手做(177)---ESP-32 掌控板
37款传感器与执行器的提法,在网络上广泛流传,其实Arduino能够兼容的传感器模块肯定是不止这37种的。鉴于本人手头积累了一些传感器和执行器模块,依照实践出真知(一定要动手做)的理念,以学习和交流为目的,这里准备逐一动手尝试系列实验,不管成功(程序走通)与否,都会记录下来—小小的进步或是搞不掂的问题,希望能够抛砖引玉。
【Arduino】168种传感器模块系列实验(资料代码+仿真编程+图形编程)
实验一百七十七:Esp32 盛思掌控板开发套件人工智能机器人乐动掌控python编程学习开发板


什么是掌控板?
掌控板由创客教育专家委员会推出, 是一款教学用开源硬件,为普及创客教育而生,反应一线Python编程教学需求,迎接普通高中新课改。掌控板是一块普及STEAM创客教育、人工智能教育、机器人编程教育的开源智能硬件。
这个掌控板是完全开源的。它集成ESP-32高性能双核芯片,支持WiFi和蓝牙双模通信,可作为物联网节点,实现物联网应用。同时掌控板上集成了OLED显示屏、RGB灯、加速度计、麦克风、光线传感器、蜂鸣器、按键开关、触摸开关、金手指外部拓展接口,支持图形化及python代码编程,可实现智能机器人、创客智造作品等智能控制类应用。

技术参数
该板具有以下硬件特性:
ESP-32主控
- 处理器:Tensilica LX6双核处理器(一核处理高速连接;一核独立应用开发)
- 主频:高达240MHz的时钟频率
- SRAM:520KB
- Flash:8MB
- Wi-Fi标准:FCC/CE/TELEC/KCC
- Wi-Fi协议:802.11 b/g/n/d/e/i/k/r (802.11n,速度高达150 Mbps),A-MPDU和A-MSDU聚合,支持0.4us防护间隔
- 频率范围:2.4~2.5 GHz
- 蓝牙协议:符合蓝牙v4.2 BR/EDR和BLE标准
- 蓝牙音频:CVSD和SBC音频低功耗:10uA
供电方式:Micro USB供电
工作电压:3.3V
最大工作电流:200mA
最大负载电流:1000mA
掌控板载
- 三轴加速度计MSA300,测量范围:±2/4/8/16G
- 地磁传感器MMC5983MA,测量范围:±8 Gauss;精度0.4mGz,电子罗盘误差±0.5°
- 光线传感器
- 麦克风
- 3 颗全彩ws2812灯珠
- 1.3英寸OLED显示屏,支持16*16字符显示,分辨率128x64
- 无源蜂鸣器
- 支持2个物理按键(A/B)、6个触摸按键
- 支持1路鳄鱼夹接口,可方便接入各种阻性传感器
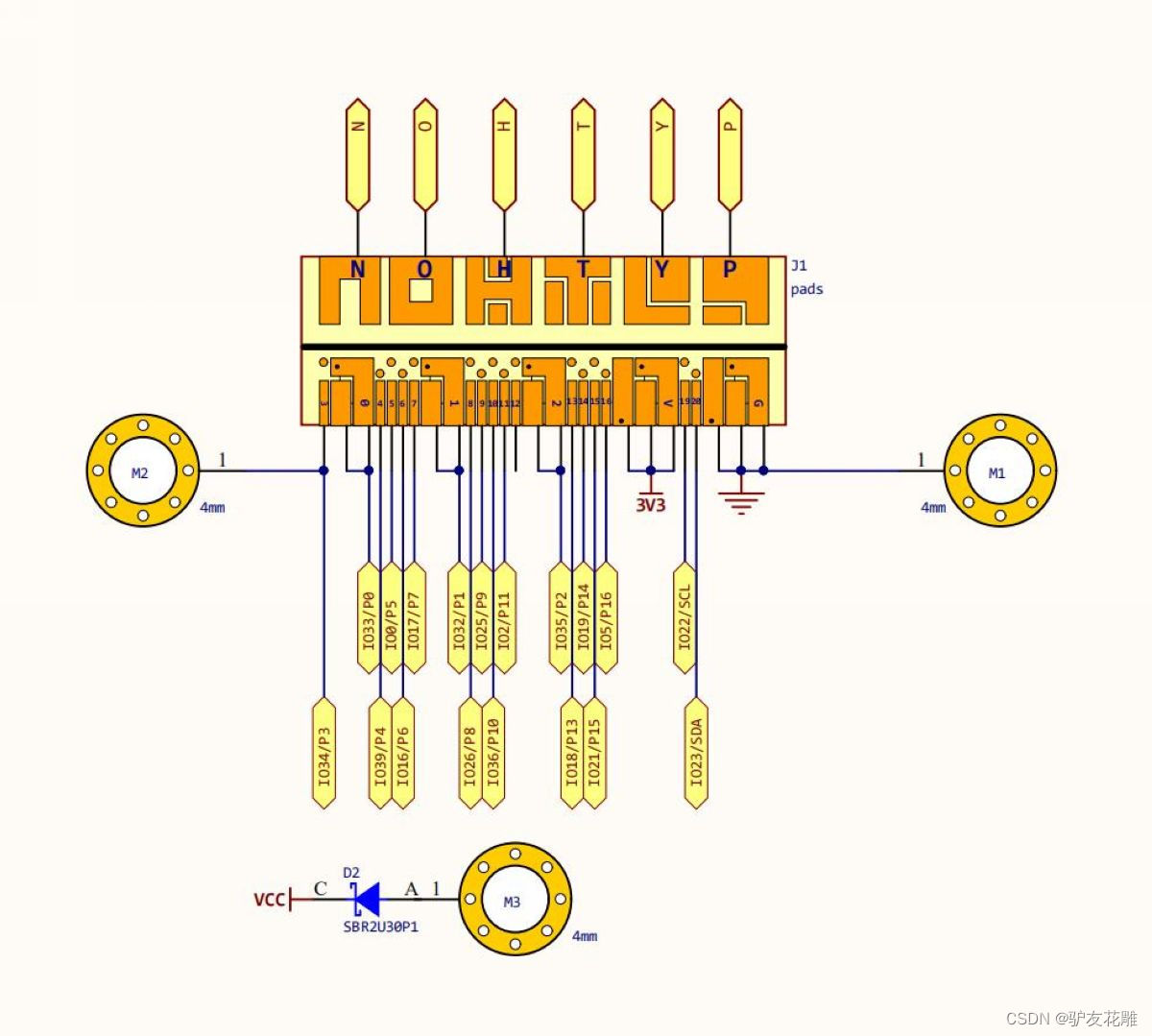
拓展接口
- 20通道数字I/O, (其中支持12路PWM,6路触摸输入)
- 5通道12bit模拟输入ADC,P0~P4
- 1路的外部输入鳄鱼夹接口:EXT/GND
- 支持I2C、UART、SPI通讯协议













电源&USB

传感器

ESP32

OLED和RGB

拓展接口