计算机视觉(四)神经网络与典型的机器学习步骤
文章目录
- 神经网络
- 生物神经元
- 人工神经元
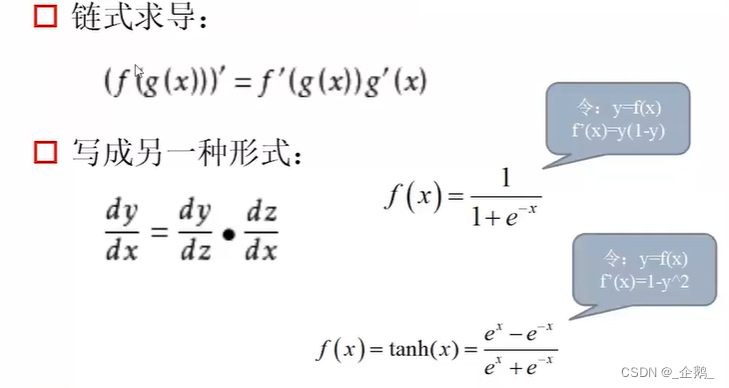
- 激活函数
- 导数
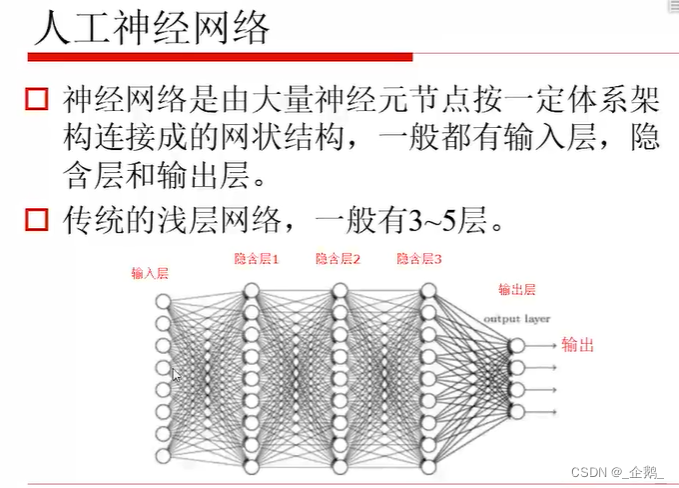
- 人工神经网络
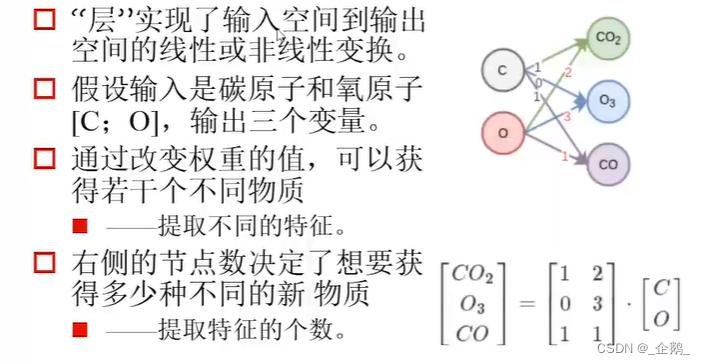
- “层”的通俗理解
- 前馈神经网络
- Delta学习规则
- 前馈神经网络的目标函数
- 梯度下降
- 输出层权重改变量
- 误差方向传播算法
- 误差传播迭代公式
- 简单的BP算例
- 随机梯度下降(SGD)
- Mini-batch Gradient Descent
- 典型的机器学习步骤
- 特征对学习的影响
- 深度学习的特征
- “连接主义”的兴衰史
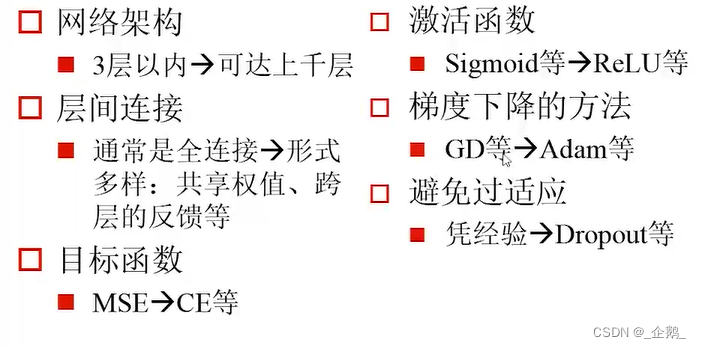
- 深度学习与神经网络的区别
神经网络
-
神经网络:大量神经元节点按一定体系架构连接成的网状结构——大脑结构
-
神经网络的作用
- 分类
- 模式识别
- 连续值预测- 建立输入与输出的映射关系
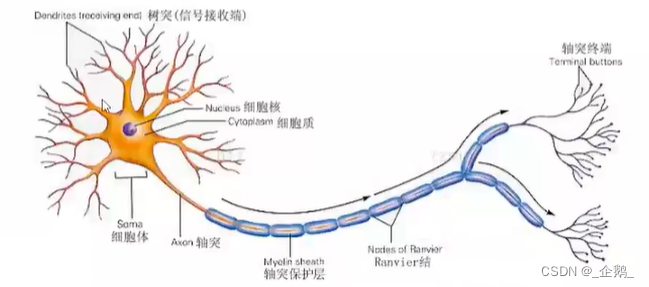
生物神经元
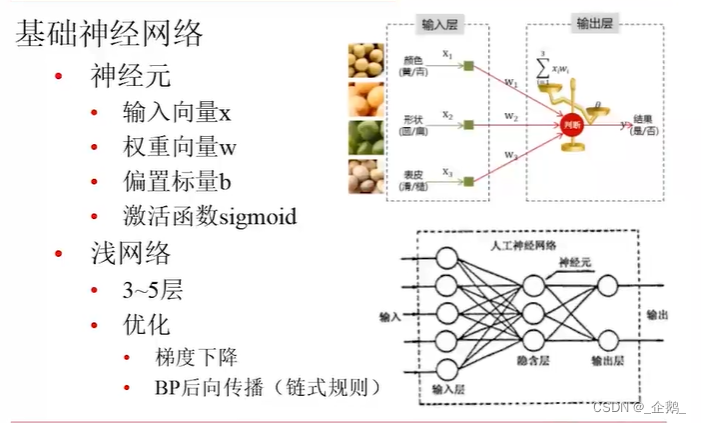
人工神经元
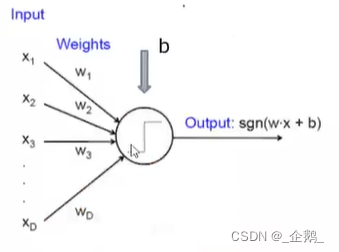
每个神经元都是一个结构相似的独立单位,接受前一层传来的数据,并将这些数据的加权和输入非线性作用函数中,最后将非线性作用函数的输出结果传递给后一层。

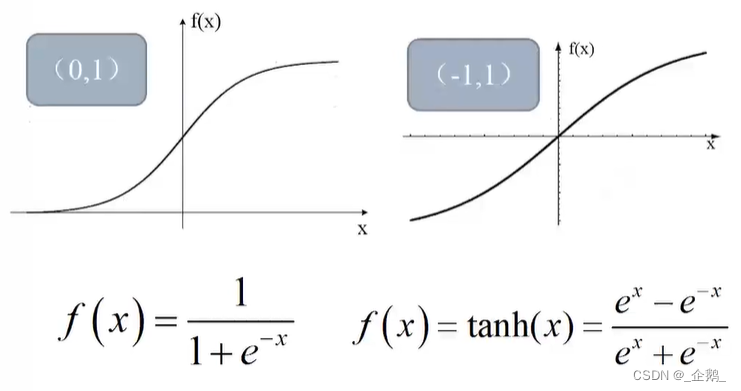
激活函数
导数
人工神经网络
“层”的通俗理解
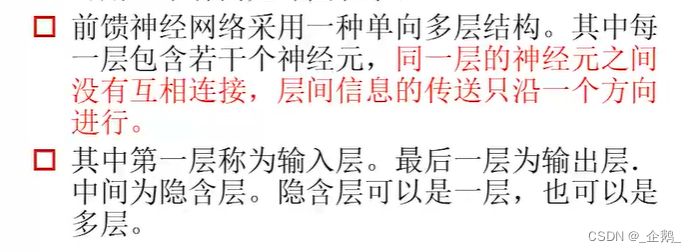
前馈神经网络
人工神经网络的一种,无反馈,可用一个有向无环图表示。
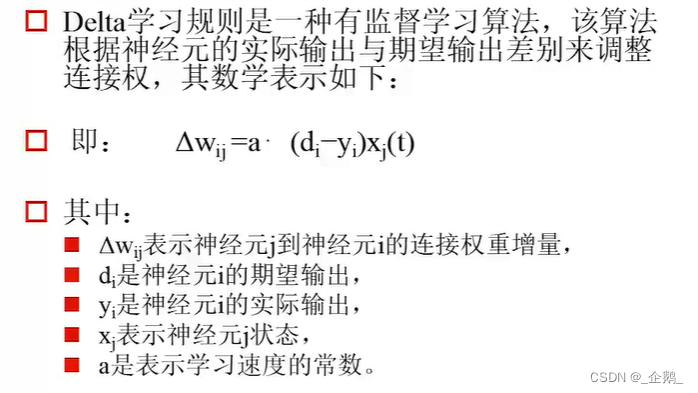
Delta学习规则
一种有监督学习算法。根据神经元的实际输出与期望输出差别来调整连接权。
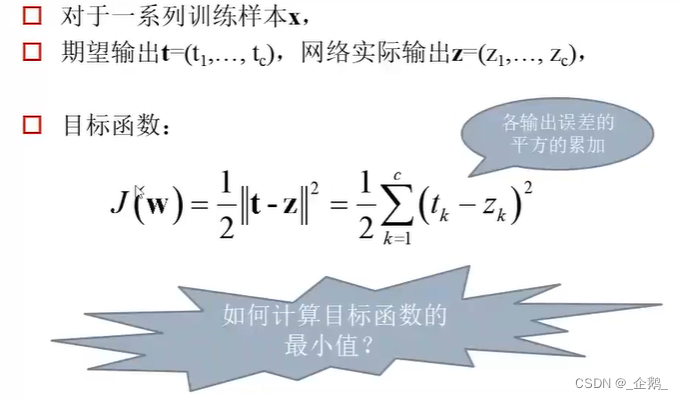
前馈神经网络的目标函数
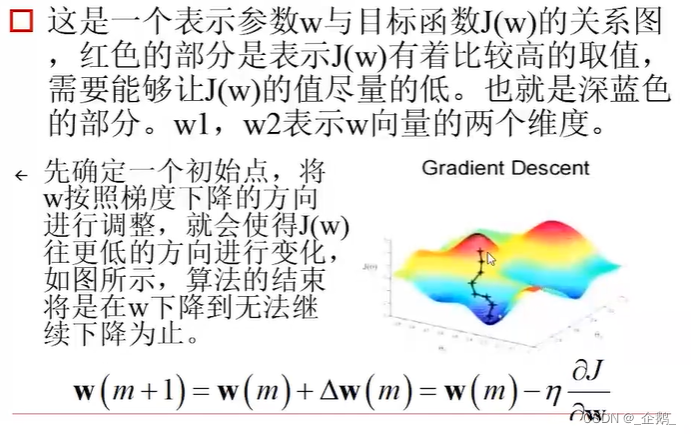
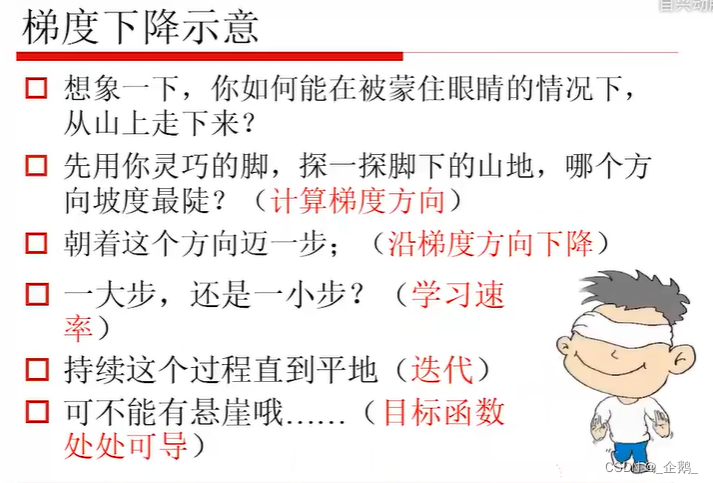
梯度下降
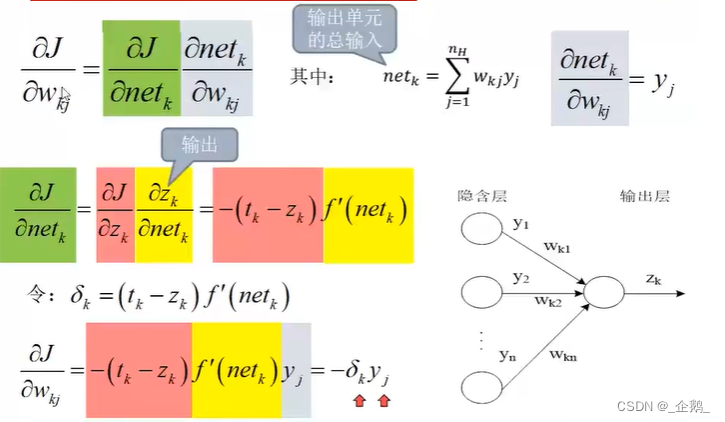
输出层权重改变量
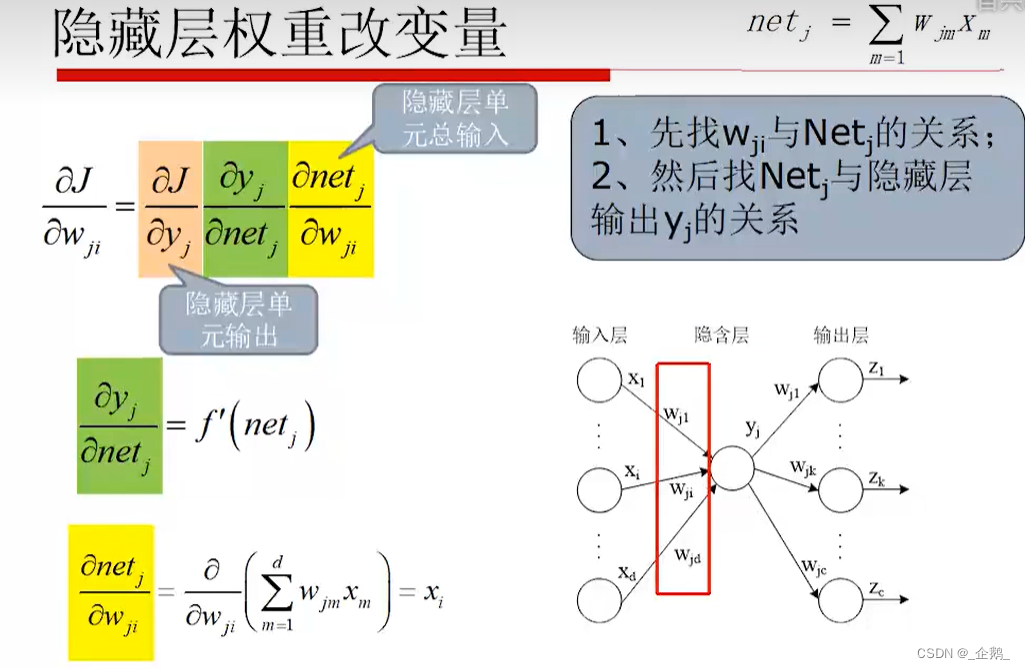
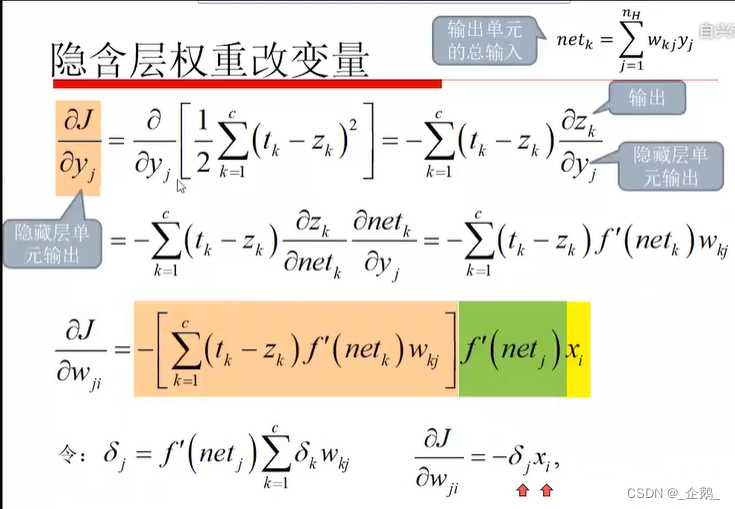
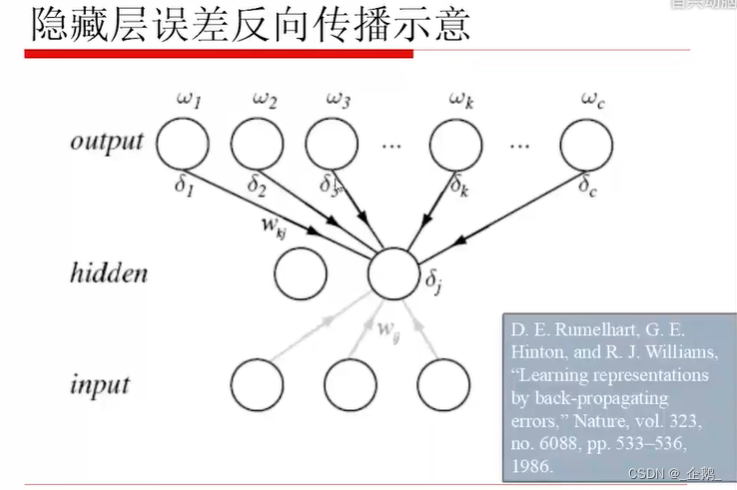
误差方向传播算法
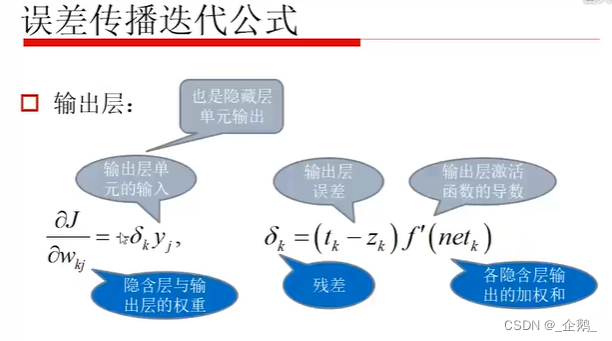
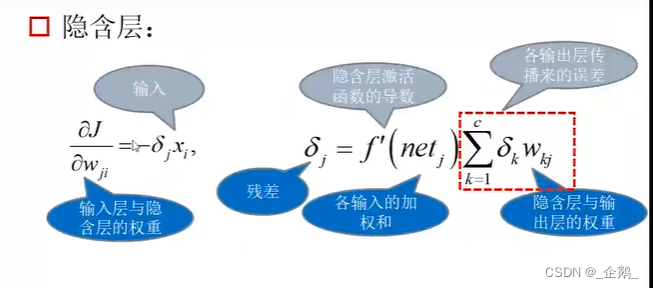
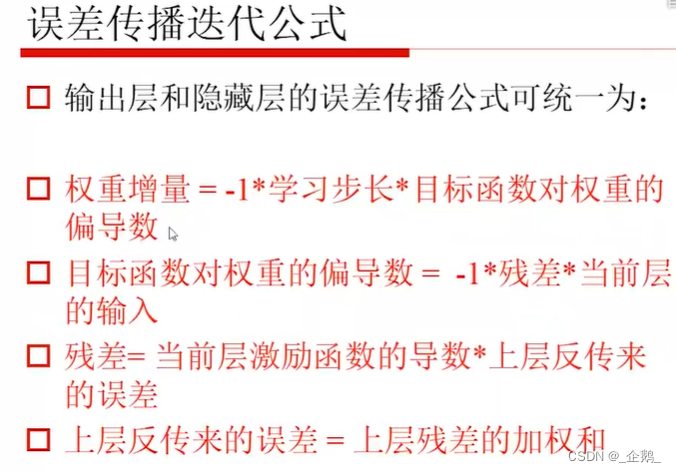
误差传播迭代公式
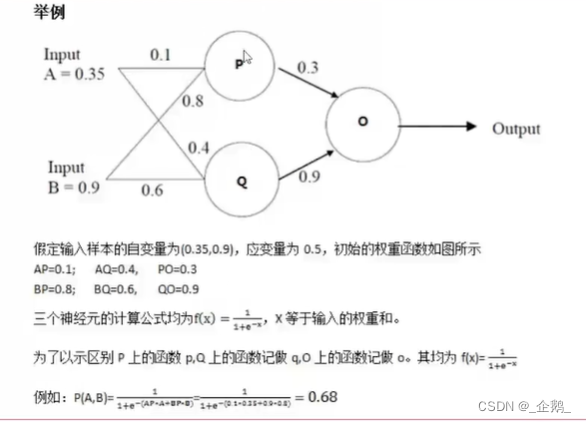
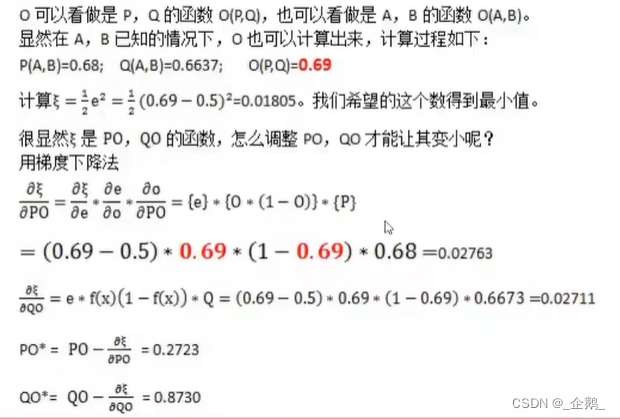
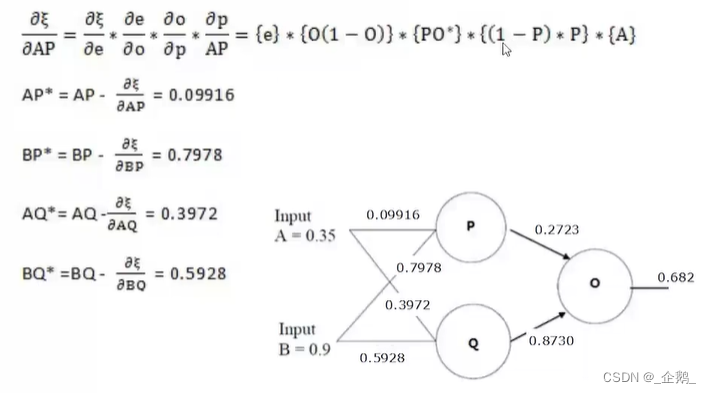
简单的BP算例
随机梯度下降(SGD)
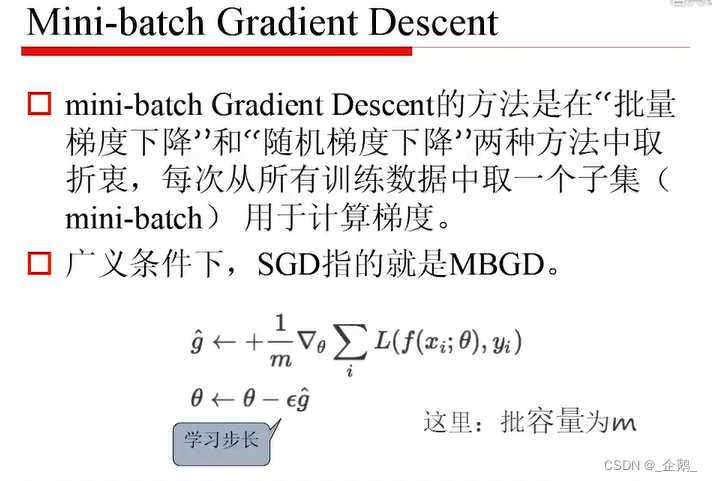
Mini-batch Gradient Descent
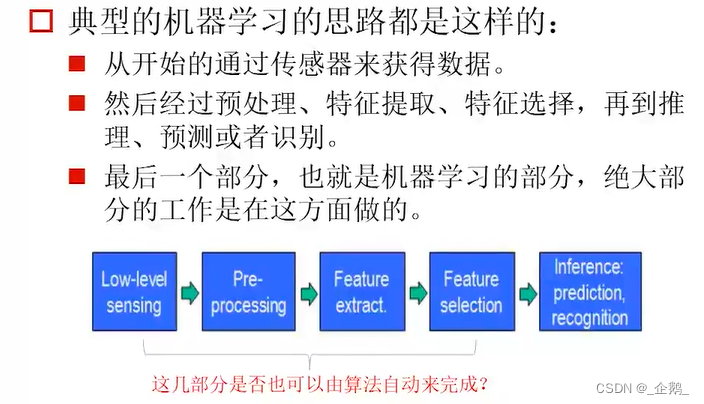
典型的机器学习步骤
特征对学习的影响
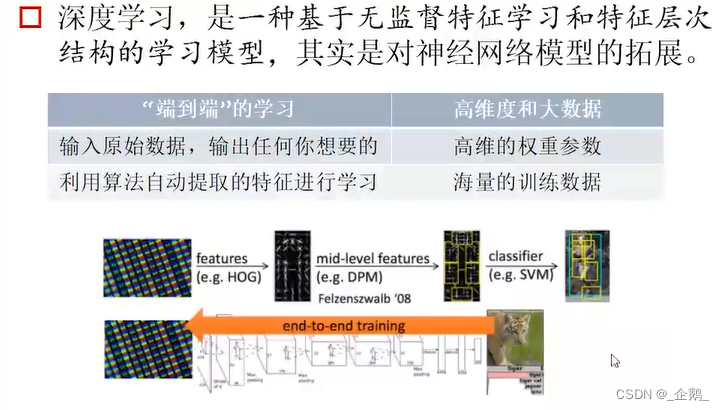
深度学习的特征
深度学习是对神经网络模型的拓展。
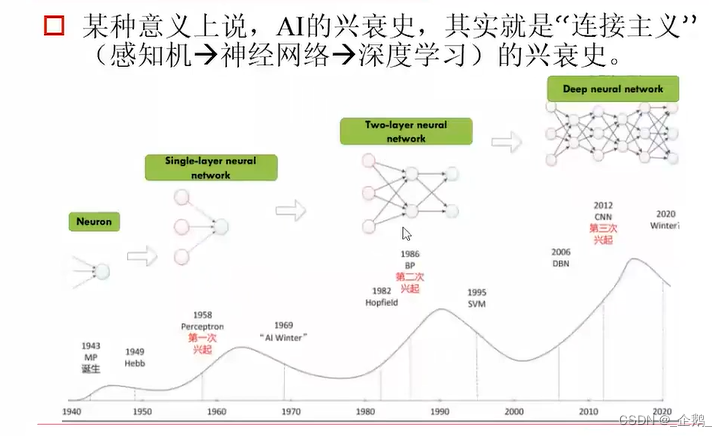
“连接主义”的兴衰史
深度学习与神经网络的区别