【ISP算法精粹】动手实战:用 Python 实现 Bayer 图像的黑电平校正
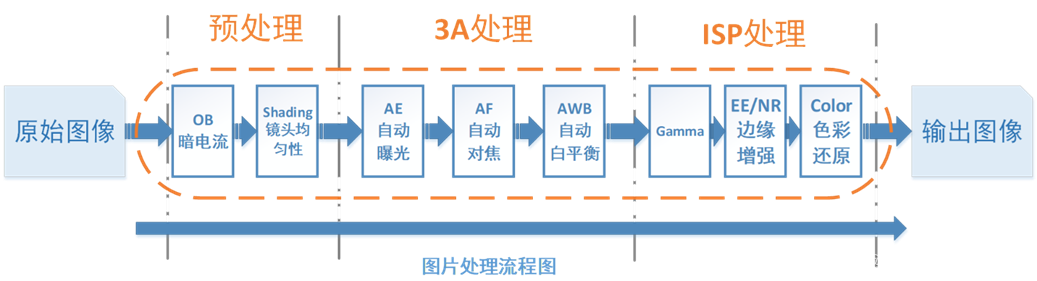
在数字成像领域,图像信号处理器(ISP)如同幕后英雄,默默将传感器捕获的原始数据转化为精美的图像。而黑电平校正,作为ISP预处理流程中的关键一环,直接影响着最终图像的质量。今天,我们就通过Python代码,亲手实现对Bayer格式图像的黑电平校正,揭开数字成像的神秘面纱。
一、准备工作:理解Bayer格式
Bayer滤镜是数码相机和手机图像传感器中广泛采用的色彩滤波阵列。它由2x2像素单元重复排列构成,典型排列为:
R G
G B
这意味着每个像素仅包含一个颜色通道(红色、绿色或蓝色),我们获取到的RAW数据呈现出马赛克般的排列。在进行黑电平校正前,必须清楚这种数据格式的特点,因为后续的算法处理都将基于此展开。本次实验,我们使用大小为512x512的Bayer格式RAW文件,你可以从OpenISP数据集下载合适的样本数据。
二、算法原理:消除暗电流的影响
图像传感器即使在完全黑暗的环境下,也会因自身的暗电流产生非零的信号输出,这个值就是黑电平。如果不进行校正,暗部区域会出现偏色、噪点等问题,影响图像质量。黑电平校正的原理十分直观,其公式为:corrected_pixel = raw_pixel - black_level 。其中,black_level是传感器暗电流的基准值,通常通过测量全黑图像的均值获得。不同的传感器,黑电平值会有所差异,例如8bit传感器的黑电平值通常在10 - 50之间,在实际应用中需要精准测量。通过减去黑电平值,我们就能将图像的暗部恢复到真实状态,为后续的图像处理奠定基础。
三、代码实现(Python版本)
import cv2
import numpy as npdef black_level_correction(raw_image, black_level=50):"""对Bayer格式RAW图像进行黑电平校正:param raw_image: numpy数组,Bayer格式RAW图像(单通道):param black_level: 黑电平基准值,默认50:return: 校正后的图像"""# 确保像素值不低于0corrected_image = np.maximum(raw_image - black_level, 0)return corrected_image# 加载RAW图像(假设为单通道uint16格式)
raw_image = cv2.imread('raw_image.raw', cv2.IMREAD_ANYDEPTH)# 执行黑电平校正
corrected_image = black_level_correction(raw_image)# 可视化对比(使用伪彩色显示)
cv2.imshow('Raw Image', raw_image)
cv2.imshow('Corrected Image', corrected_image)
cv2.waitKey(0)
cv2.destroyAllWindows()
在上述代码中,black_level_correction函数接收RAW图像数据和黑电平值作为参数。通过np.maximum函数,我们在减去黑电平值的同时,确保像素值不会低于0,避免出现负数导致的数据错误。随后,使用OpenCV库的imread函数读取RAW图像,并调用校正函数得到处理后的图像。最后,通过imshow函数可视化校正前后的图像,直观感受黑电平校正的效果。
四、关键技术点解析
- 数据类型处理:RAW图像通常具有10bit或12bit的深度,为了正确读取这类数据,我们在使用
cv2.imread函数时,需要指定cv2.IMREAD_ANYDEPTH参数。这样,OpenCV就能根据图像的实际深度读取数据,避免因数据类型不匹配导致的错误。 - 边界条件:在执行黑电平校正时,必须严格确保校正后像素值大于等于0。如果不进行限制,当原始像素值小于黑电平值时,就会出现负数。而在图像数据中,负数是没有实际意义的,会导致显示错误或后续处理异常。因此,
np.maximum函数在这里起到了关键作用,它能自动将小于0的值设置为0。 - 工程优化:在实际的工业项目中,不同颜色通道(R/G/B)的黑电平值可能存在差异。为了进一步提升校正精度,我们可以针对每个通道分别设置黑电平值。这就需要我们在处理Bayer格式图像时,准确区分不同通道的像素,并应用相应的校正参数,从而实现更精准的黑电平校正。
五、实验结果分析
在完成代码运行后,我们可以直观地观察到校正前后图像的差异:
- 校正前:图像的暗部区域存在明显偏色,这是由于暗电流噪声导致像素值偏离了真实状态。这些噪声会影响图像的整体质量,使暗部细节变得模糊不清。
- 校正后:黑色区域基本回归真实值,图像的暗部变得更加纯净,为后续的去马赛克、色彩校正等处理提供了干净的数据源。通过对比,我们能清晰地看到黑电平校正对图像质量提升的重要作用。
- 误差分析:黑电平值的设置至关重要。若设置过高,会过度削减暗部像素值,导致暗部细节丢失,原本丰富的细节可能会变成一片漆黑;若设置过低,则无法完全消除暗电流噪声,残留的噪声会使图像暗部依然存在偏色问题。因此,准确测量和合理设置黑电平值是获得高质量图像的关键。
六、进阶挑战
尝试修改代码实现分通道黑电平校正(假设R通道基准值60,B通道55,G通道45)。在处理Bayer格式图像时,需要巧妙地思考如何区分不同通道的像素,并应用相应的校正参数。完成代码修改后,将你的成果提交到GitHub并@作者,优秀方案将获得《ISP算法实战手册》电子版奖励。这不仅是一次技术的挑战,更是提升自己ISP算法实践能力的绝佳机会。
通过本次实战,相信你已经对Bayer图像的黑电平校正有了深入的理解和实践经验。数字成像的世界丰富多彩,每一个算法都像是一把钥匙,解锁着图像质量提升的新可能。期待你在后续的学习中,继续探索更多有趣的ISP算法,创作出更精彩的图像!