ardupilot 遥控的输入控制模式
目录
本节主要记录自己整理ardupilot的遥控器的输入控制模式:正常模式、简单模式、超简单模式的理解。
1.正常模式(有头模式)
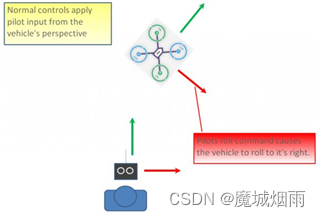
在不用简单和超简单的模式的情况下,无人机操作员操作的控制输入是对应着不断旋转着的飞行器进行操作的。如上方图所示举例,当无人机操作员进行向右(红色)的 横滚(roll)的控制的时候,模型会向它自己的右侧横滚。如果飞手和飞行器在同一方向,控制起来就相对简单,但是如果飞行器面对着飞手,没有经验的飞手就会感觉控制全都反了。 换句话说,无人机操作员向右控制横滚,从无人机操作员的视角来看模型是向左移动的。
总的概括:正常模式就是飞机的头朝着哪个方向,那个方向就是前方,遥控器输入的横滚和俯仰值不需要进行投影。(假设rollin为遥控器输入的横滚值,pitchin为遥控器输入的俯仰值,rollb为机体坐标系的横滚值,pitchb为机体坐标系的俯仰值, rolle为惯性坐标系统的横滚值, pitche为惯性坐标系的俯仰值。)在正常模式下,不需要把角度转换成关系坐标系(这个坐标系注意是机体坐标系!)。