网络解析----faster rcnn
Faster R-CNN(Region-based Convolutional Neural Network)是一种基于区域的卷积神经网络用于目标检测任务的模型。它是一种两阶段的目标检测方法,主要包含以下几个步骤:
- Region Proposal Network(RPN): Faster R-CNN首先通过共享卷积层对输入图像进行特征提取,然后通过Region Proposal Network生成候选目标边界框。RPN会在每个位置上滑动一个固定大小的窗口,在窗口上生成多个不同尺寸和比例的锚框,然后通过分类网络和回归网络对锚框进行分类和精细化调整,生成候选目标边界框。
- Region of Interest Pooling(RoI Pooling): 在RPN生成的候选目标边界框上进行RoI Pooling操作,将每个候选边界框划分为固定大小的特征图区域,将这些区域映射到固定大小的特征图上。
- Classification and Regression: 将划分后的固定大小的特征图区域输入到分类网络和回归网络中。分类网络用于判别每个区域是否包含目标,回归网络用于对每个候选边界框进行位置和大小的微调。
Faster R-CNN通过这样的两阶段方式实现目标检测,相比于之前的方法,它在准确性和速度上都有很大的提升。这种方法的主要优势在于可以共享特征提取的卷积层,减少了计算量,并且通过RPN生成候选边界框,可以更准确地定位目标。
faster rcnn网络架构图如下所示: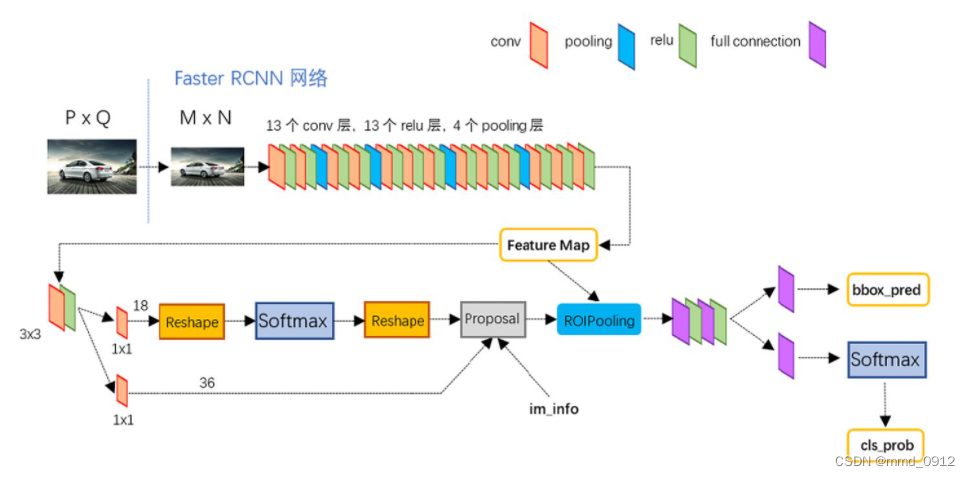
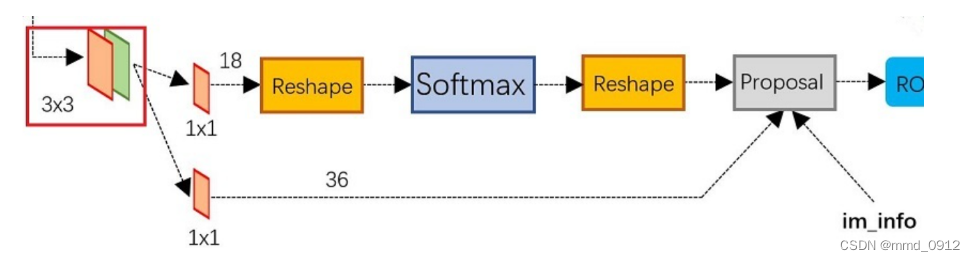
RPN的流程如下所示:
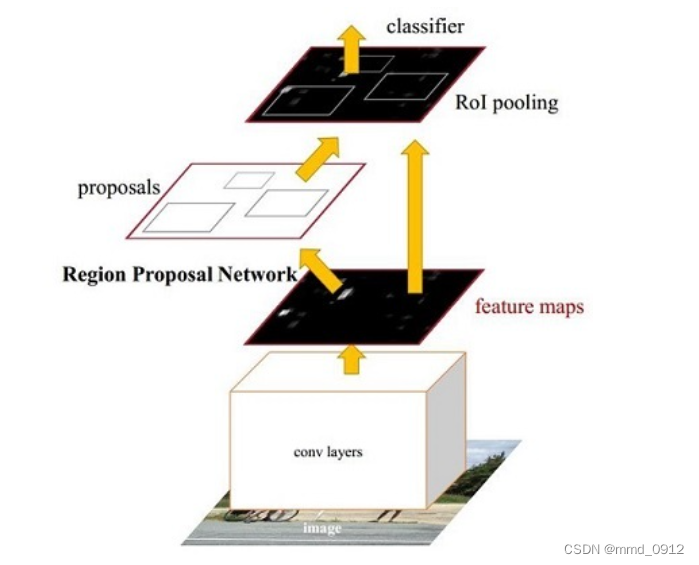
网络流程如下所示:
faster rcnn训练流程:
Faster R-CNN的训练流程主要包括以下步骤:
1.数据准备:首先需要准备好训练数据集和测试数据集,并对其进行注。标注包括每个物体的位置和类别信息,在训练阶段使用标注信息来计算损失并更新模型。
2.提取特征:使用特定的卷积神经网络模型(如VGG,ResNet等)作为特征提取器,对输入的图像进行特征提取。特征提取的方式可以是预训练的模型,也可以是现场训练的模型。
3.生成候选区域:使用区域提议网络(Region Proposal Network, RPN)来生成候选区域。RPN是一个用于检测各种大小和宽高比的物体的深度卷积神经网络。
4.区域分类:对候选区域进行分类,得出每个候选区域包含物体的类别概率。
5.边框回归:对候选区域进行边框回归,得出物体的准确位置(即左上角坐标和右下角坐标)。
6.损失计算:将分类和边框回归的结果与标注信息进行比较,计算分类损失和边框回归损失,并将两者相加得到总损失。
7.参数更新:使用总损失来更新模型参数,使得模型在下一轮迭代中能够更好地预测物体位置和类别。
faster rcnn的网络结构:
model = dict(type='FasterRCNN',pretrained='torchvision://resnet101',backbone=dict(type='ResNet',depth=101,num_stages=4,out_indices=(0, 1, 2, 3),frozen_stages=1,norm_cfg=dict(type='BN', requires_grad=True),norm_eval=True,style='pytorch'),neck=dict(type='FPN',in_channels=[256, 512, 1024, 2048],out_channels=256,num_outs=5),rpn_head=dict(type='RPNHead',in_channels=256,feat_channels=256,anchor_generator=dict(type='AnchorGenerator',scales=[8],ratios=[0.2, 0.5, 1.0, 2.0, 5.0],strides=[4, 8, 16, 32, 64]),bbox_coder=dict(type='DeltaXYWHBBoxCoder',target_means=[0.0, 0.0, 0.0, 0.0],target_stds=[1.0, 1.0, 1.0, 1.0]),loss_cls=dict(type='CrossEntropyLoss', use_sigmoid=True, loss_weight=1.0),loss_bbox=dict(type='L1Loss', loss_weight=1.0)),roi_head=dict(type='StandardRoIHead',bbox_roi_extractor=dict(type='SingleRoIExtractor',roi_layer=dict(type='RoIAlign', output_size=7, sampling_ratio=0),out_channels=256,featmap_strides=[4, 8, 16, 32]),bbox_head=dict(type='Shared2FCBBoxHead',in_channels=256,fc_out_channels=1024,roi_feat_size=7,num_classes=3,bbox_coder=dict(type='DeltaXYWHBBoxCoder',target_means=[0.0, 0.0, 0.0, 0.0],target_stds=[0.1, 0.1, 0.2, 0.2]),reg_class_agnostic=False,loss_cls=dict(type='CrossEntropyLoss', use_sigmoid=False, loss_weight=1.0),loss_bbox=dict(type='L1Loss', loss_weight=1.0))))
train_cfg = dict(rpn=dict(assigner=dict(type='MaxIoUAssigner',pos_iou_thr=0.55,neg_iou_thr=0.3,min_pos_iou=0.3,match_low_quality=True,ignore_iof_thr=-1),sampler=dict(type='RandomSampler',num=256,pos_fraction=0.5,neg_pos_ub=-1,add_gt_as_proposals=False),allowed_border=-1,pos_weight=-1,debug=False),rpn_proposal=dict(nms_across_levels=False,nms_pre=2000,nms_post=1000,max_num=1000,nms_thr=0.7,min_bbox_size=0),rcnn=dict(assigner=dict(type='MaxIoUAssigner',pos_iou_thr=0.5,neg_iou_thr=0.5,min_pos_iou=0.5,match_low_quality=False,ignore_iof_thr=-1),sampler=dict(type='RandomSampler',num=512,pos_fraction=0.25,neg_pos_ub=-1,add_gt_as_proposals=True),pos_weight=-1,debug=False))
test_cfg = dict(rpn=dict(nms_across_levels=False,nms_pre=1000,nms_post=1000,max_num=1000,nms_thr=0.7,min_bbox_size=0),rcnn=dict(score_thr=0.05,nms=dict(type='nms', iou_threshold=0.5),max_per_img=100))
dataset_type = 'VOCDataset'
data_root = 'VOC2007'
img_norm_cfg = dict(mean=[123.675, 116.28, 103.53], std=[58.395, 57.12, 57.375], to_rgb=True)
train_pipeline = [dict(type='LoadImageFromFile'),dict(type='LoadAnnotations', with_bbox=True, with_mask=True),dict(type='Resize', img_scale=(1600, 928), keep_ratio=True),dict(type='RandomFlip', flip_ratio=0.8),dict(type='Normalize',mean=[123.675, 116.28, 103.53],std=[58.395, 57.12, 57.375],to_rgb=True),dict(type='Pad', size_divisor=32),dict(type='DefaultFormatBundle'),dict(type='Collect', keys=['img', 'gt_bboxes', 'gt_labels'])
]
test_pipeline = [dict(type='LoadImageFromFile'),dict(type='MultiScaleFlipAug',img_scale=(1600, 928),flip=False,transforms=[dict(type='Resize', keep_ratio=True),dict(type='RandomFlip'),dict(type='Normalize',mean=[123.675, 116.28, 103.53],std=[58.395, 57.12, 57.375],to_rgb=True),dict(type='Pad', size_divisor=32),dict(type='ImageToTensor', keys=['img']),dict(type='Collect', keys=['img'])])
]
data = dict(samples_per_gpu=1,workers_per_gpu=0,train=dict(type='VOCDataset',ann_file='VOC2007/ImageSets/Main/train.txt',img_prefix='VOC2007',pipeline=[dict(type='LoadImageFromFile'),dict(type='LoadAnnotations', with_bbox=True),dict(type='Resize', img_scale=(1600, 928), keep_ratio=True),dict(type='RandomFlip', flip_ratio=0.8),dict(type='Normalize',mean=[123.675, 116.28, 103.53],std=[58.395, 57.12, 57.375],to_rgb=True),dict(type='Pad', size_divisor=32),dict(type='DefaultFormatBundle'),dict(type='Collect', keys=['img', 'gt_bboxes', 'gt_labels'])]),val=dict(type='VOCDataset',ann_file='VOC2007/ImageSets/Main/train.txt',img_prefix='VOC2007',pipeline=[dict(type='LoadImageFromFile'),dict(type='MultiScaleFlipAug',img_scale=(1600, 928),flip=False,transforms=[dict(type='Resize', keep_ratio=True),dict(type='RandomFlip'),dict(type='Normalize',mean=[123.675, 116.28, 103.53],std=[58.395, 57.12, 57.375],to_rgb=True),dict(type='Pad', size_divisor=32),dict(type='ImageToTensor', keys=['img']),dict(type='Collect', keys=['img'])])]),test=dict(type='VOCDataset',ann_file='VOC2007/ImageSets/Main/train.txt',img_prefix='VOC2007',pipeline=[dict(type='LoadImageFromFile'),dict(type='MultiScaleFlipAug',img_scale=(1600, 928),flip=False,transforms=[dict(type='Resize', keep_ratio=True),dict(type='RandomFlip'),dict(type='Normalize',mean=[123.675, 116.28, 103.53],std=[58.395, 57.12, 57.375],to_rgb=True),dict(type='Pad', size_divisor=32),dict(type='ImageToTensor', keys=['img']),dict(type='Collect', keys=['img'])])]))
evaluation = dict(interval=1, metric='mAP')
optimizer = dict(type='SGD', lr=0.0025, momentum=0.9, weight_decay=0.0001)
optimizer_config = dict(grad_clip=None)
lr_config = dict(policy='step',warmup='linear',warmup_iters=500,warmup_ratio=0.001,step=[8, 11])
total_epochs = 16
checkpoint_config = dict(interval=1)
log_config = dict(interval=50, hooks=[dict(type='TextLoggerHook')])
dist_params = dict(backend='nccl')
log_level = 'INFO'
work_dir = './'
load_from = None
resume_from = None
workflow = [('train', 1)]
gpu_ids = range(0, 1)