ROS学习——通信机制(话题通信①—发布方实现)
2.1 话题通信 · Autolabor-ROS机器人入门课程《ROS理论与实践》零基础教程
040话题通信(C++)1_发布方框架_Chapter2-ROS通信机制_哔哩哔哩_bilibili
一、ROS 中的基本通信机制主要有如下三种实现策略
- 话题通信(发布订阅模式
- 服务通信(请求响应模式)
- 参数服务器(参数共享模式)

二、发布方框架
1.创建ROS工作空间
mkdir -p xxx_ws/src(必须得有 src。xxx是文件名)
cd xxx_ws
catkin_make
2.启动vscode
cd xxx_ws
code .
3.
①新建功能包

新建功能包名称————plumbing_pub_sub
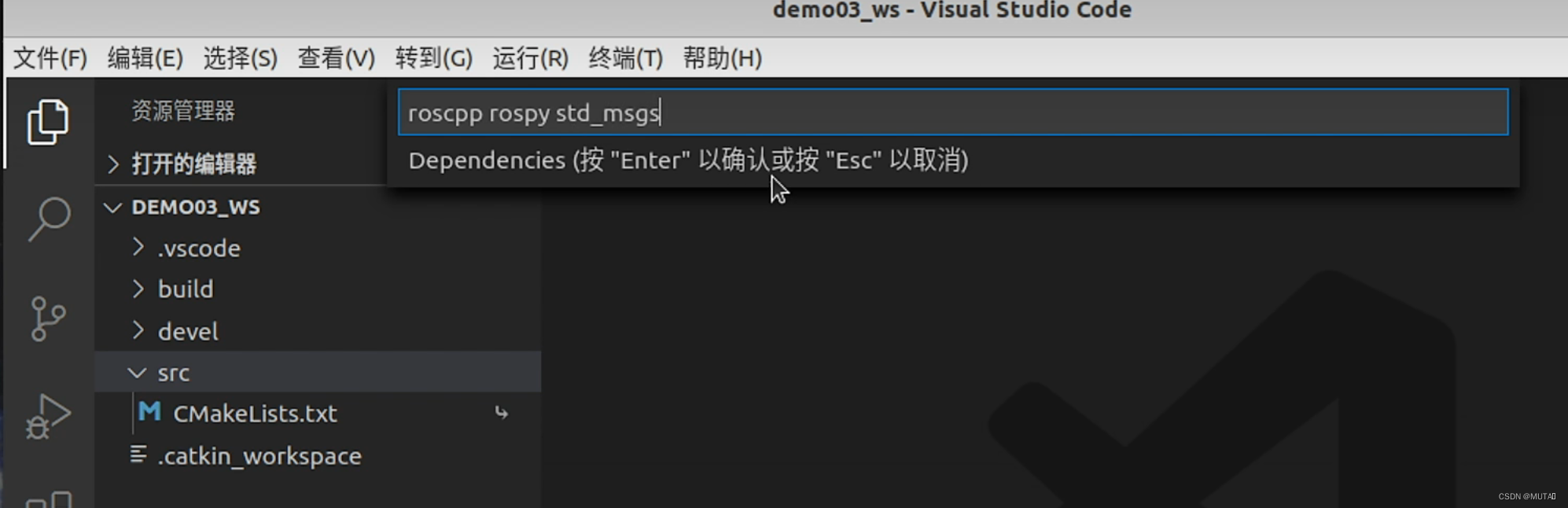
②导入依赖的包
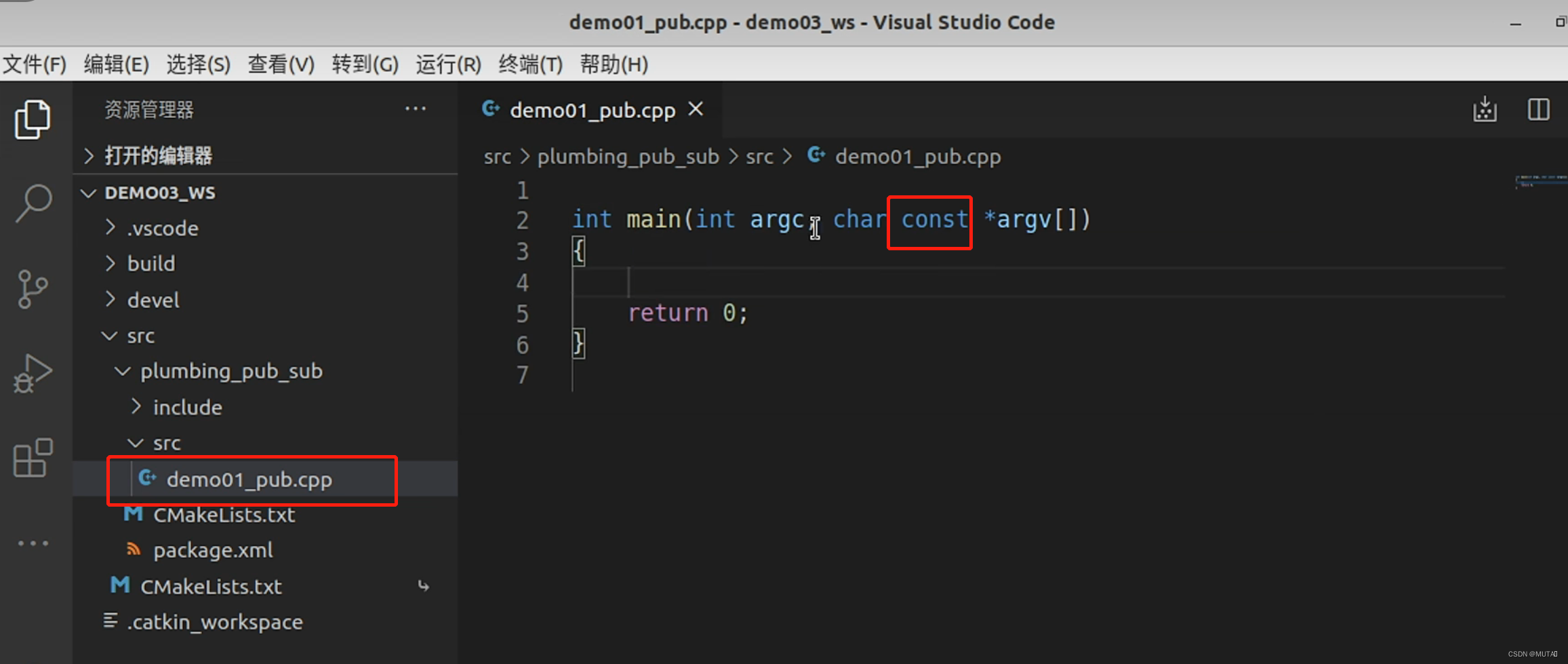
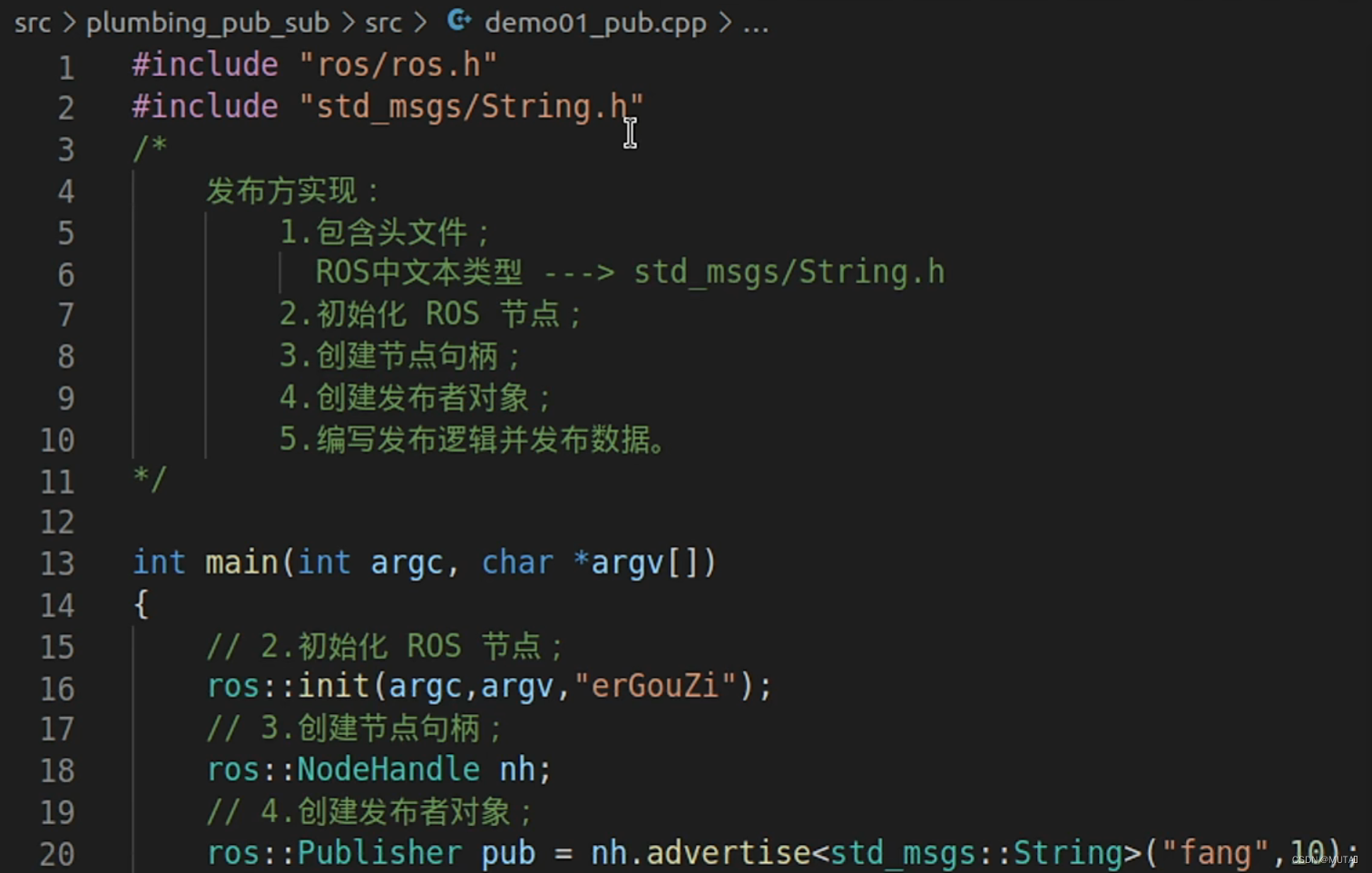
③新建文件(demo01_pub.cpp),搭建框架
注意删除const修饰符
④包含头文件

修改.vscode/tasks.json 文件,否则ros.h头文件会报错
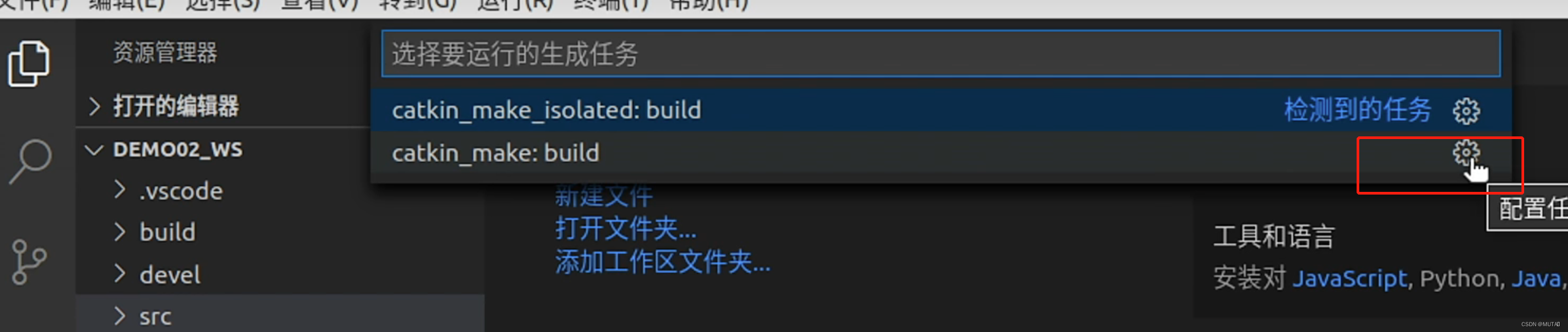
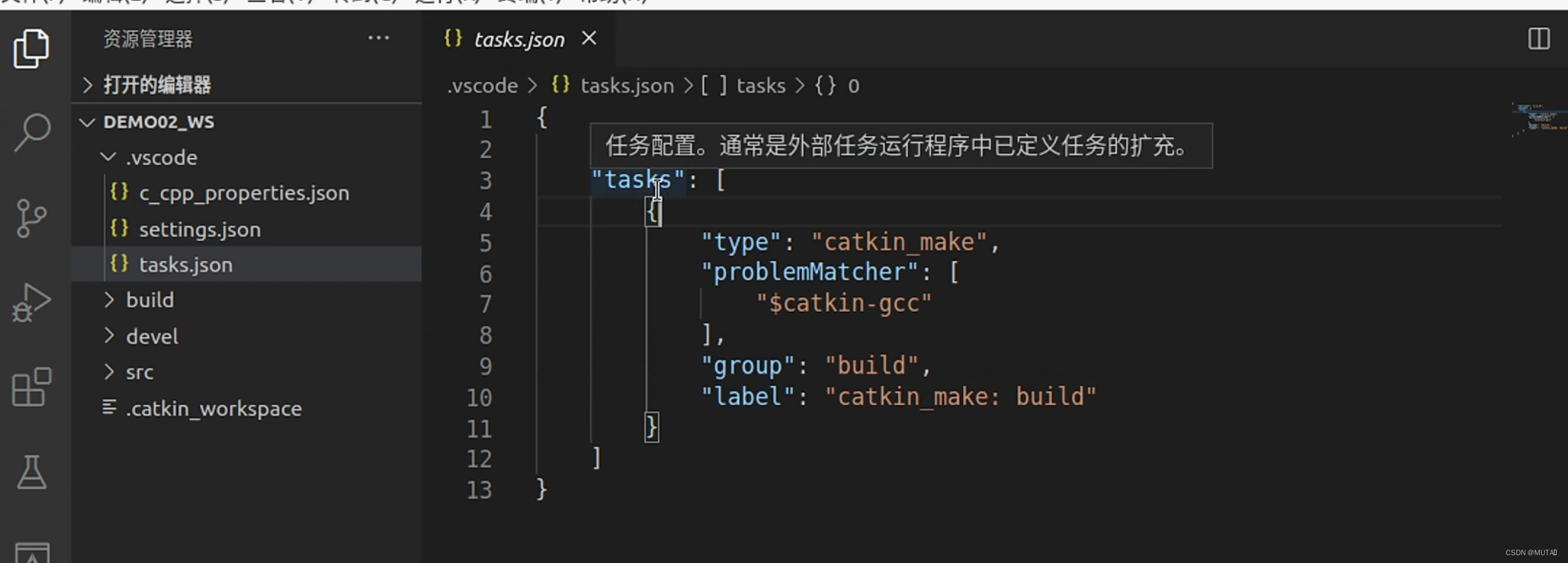
内容修改为以下内容:
{
// 有关 tasks.json 格式的文档,请参见// https://go.microsoft.com/fwlink/?LinkId=733558"version": "2.0.0","tasks": [{"label": "catkin_make:debug", //代表提示的描述性信息"type": "shell", //可以选择shell或者process,如果是shell代码是在shell里面运行一个命令,如果是process代表作为一个进程来运行"command": "catkin_make",//这个是我们需要运行的命令"args": [],//如果需要在命令后面加一些后缀,可以写在这里,比如-DCATKIN_WHITELIST_PACKAGES=“pac1;pac2”"group": {"kind":"build","isDefault":true},"presentation": {"reveal": "always"//可选always或者silence,代表是否输出信息},"problemMatcher": "$msCompile"}]
}
⑤发布方

解释:
(1)头文件
#include "std_msgs/String.h"std_msgs功能包文件里的String,创建的是string文本类型
(2)初始化节点
erGouZi是节点名称
(3)实例化句柄
ros::NodeHandle nh;//该类封装了 ROS 中的一些常用功能调用ros命名空间下的NodeHandle ,nh是句柄名称
(4)创建发布者对象![]()
调用ros命名空间下的Publisher,pub是发布者对象名称,调用句柄nh的advertise函数( 创建发布者对象),该函数有多个重载,这里选用第二种重载函数

返回值类型ros::Publisher,函数名叫advertise,M指泛型类型,指一会要发布的数据类型,泛型可以自动推导不用写;const std::string&topic指参数1是字符串类型,topic是话题(自定义),unit32_t queue_size是一个长度,在发布数据时,网络阻塞部分数据发不出去,假设发布12个数据,由于网络阻塞都没发出去,因此依次放在队列里面,这里如果设置长度为10,那么前两个数据被抛弃,相当于缓冲区;
std_msgs::String 消息类型;
fang——话题名称;
10——话题长度,最多缓存长度;
(5)编写发布逻辑并发布数据
先创建被发布消息,msg是发布对象名称;
std_msgs::String msg;编写循环,循环中发布数据
while (ros::ok()){//使用 stringstream 拼接字符串与编号std::stringstream ss;ss << msg_front << count;msg.data = ss.str();//发布消息pub.publish(msg);//加入调试,打印发送的消息ROS_INFO("发送的消息:%s",msg.data.c_str());//根据前面制定的发送贫频率自动休眠 休眠时间 = 1/频率;r.sleep();count++;//循环结束前,让 count 自增//暂无应用ros::spinOnce();}ros::ok——循环条件,指如果节点还存在
pub.publish(msg)——pub中的publish发布函数;
⑥配置cmakelists

执行的源文件名称
参数1是给这个文件节点映射的名称,一般源文件名称是什么,这里名称就设置成什么

放开注释,把参数1改成映射的名称


⑦编译 ctrl+shift+B
⑧运行
先打开终端roscore,启动ros核心
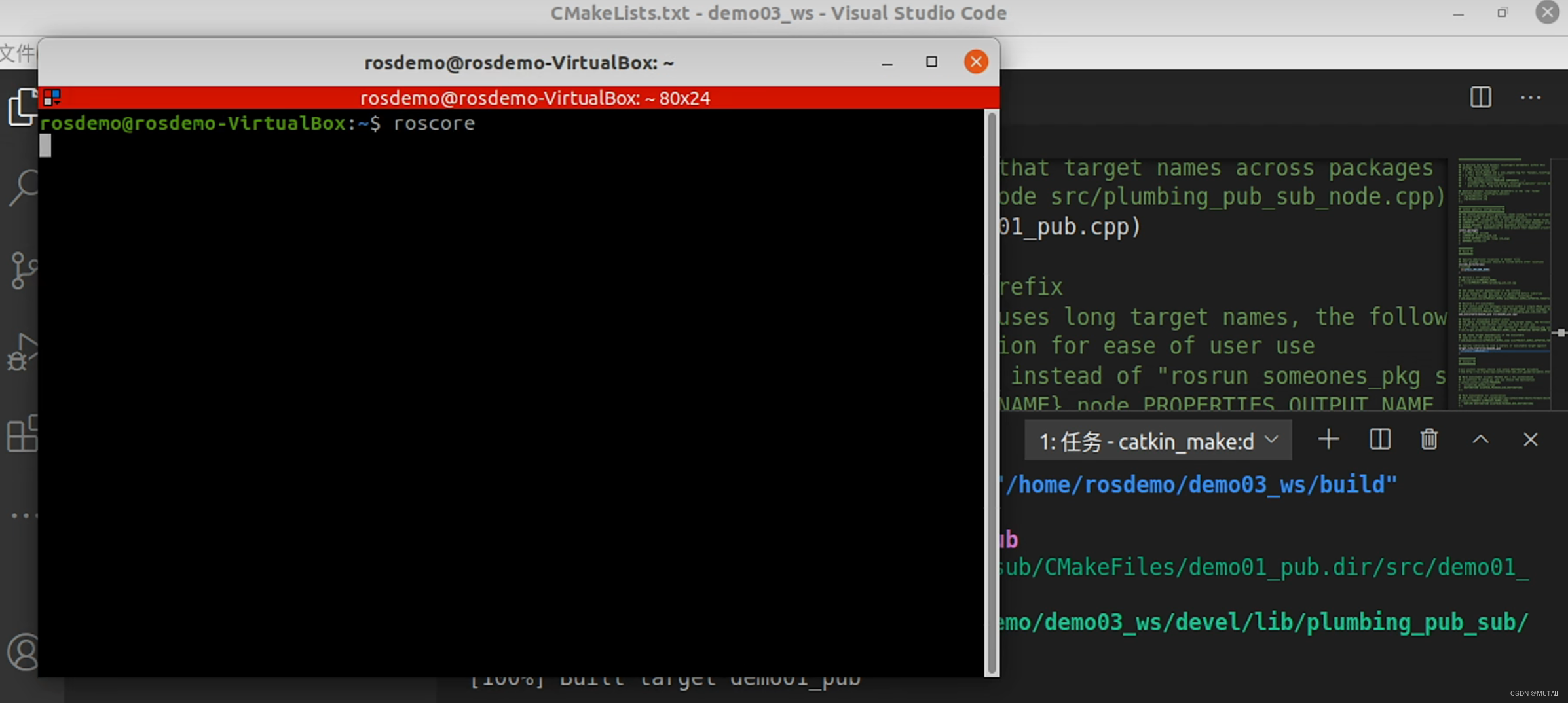
再重开终端

plumbing_pub_sub功能包名
⑨检验,再开终端
 fang——话题名
fang——话题名
三、发布方逻辑
要求:以10HZ的频率发布数据,并且文本后添加编号
1.发布频率

创建rate对象
2. 调用rate对象里的sleep函数

3.设置编号
添加头文件


4.添加日志

因为有中文输出,为避免乱码需要添加该行:
