Linux-0.11 boot目录bootsect.s详解
Linux-0.11 boot目录bootsect.s详解
模块简介
bootsect.s是磁盘启动的引导程序,其概括起来就是代码的搬运工,将代码搬到合适的位置。下图是对搬运过程的概括,可以有个印象,后面将详细讲解。
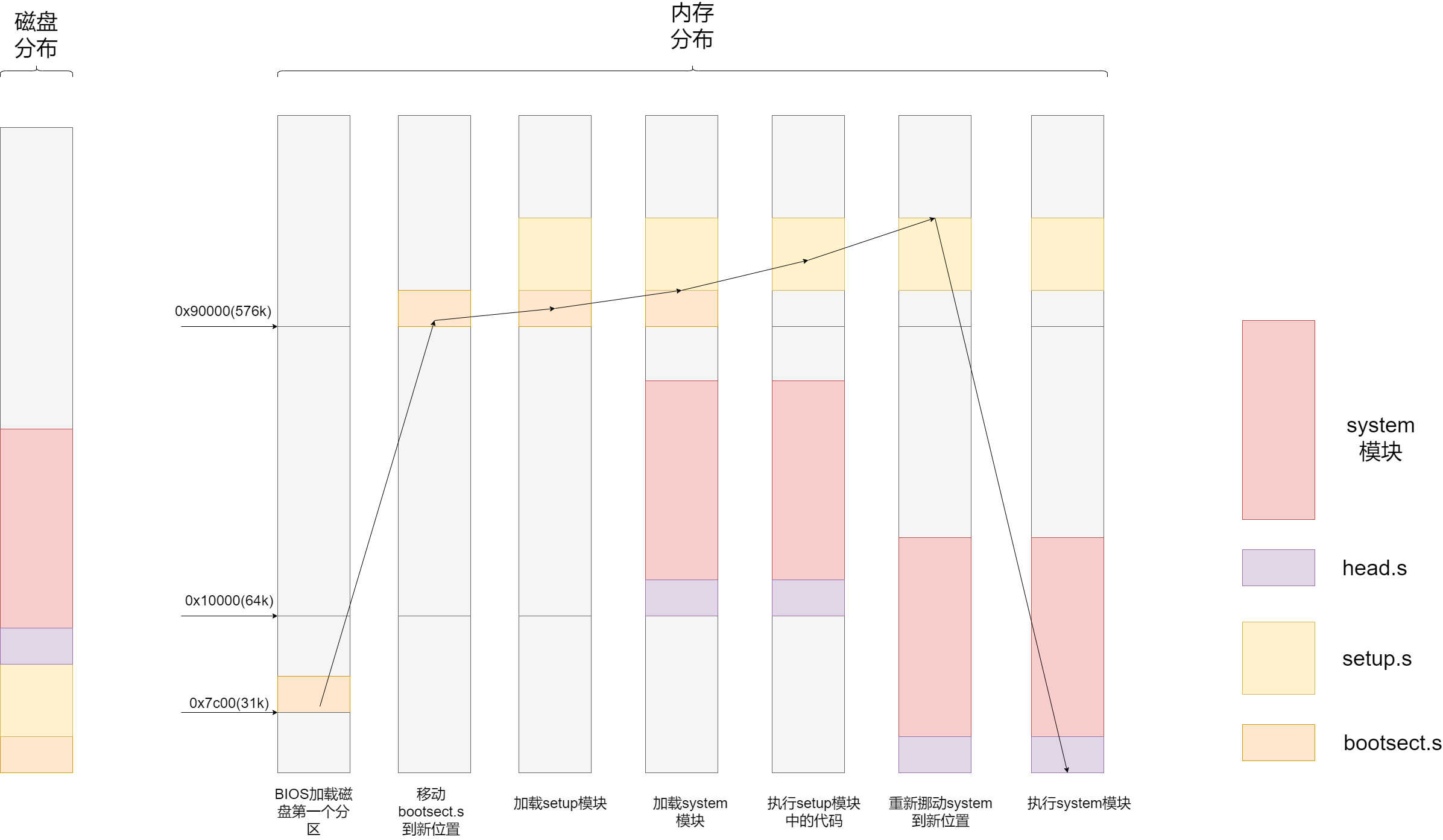
bootsect.s主要做了如下的三件事:
- 搬运bootsect.s代码到0x9000:0x0000处
- 加载setup.s代码到0x9000:0x200处
- 加载system模块到0x1000:0x0000处
过程详解
搬运bootsect.s代码到0x9000:0x0000处
将ax寄存器设置为0x07c0, 接着ax寄存器的值拷贝给ds,即ds目前也为0x07c0。
将ax寄存器设置为0x9000, 接着ax寄存器的值拷贝给es,即es目前也为0x9000。
mov $BOOTSEG, %ax #将ds段寄存器设置为0x07c0
mov %ax, %ds
mov $INITSEG, %ax #将es段寄存器设置为0x9000
mov %ax, %es
接下来将ecx的值设置为256。接下来通过sub将si和di寄存器设置为0。
接下来使用rep和movsw从ds:si拷贝256个字(512字节)到es:si处。
mov $256, %cx #设置移动计数值256字
sub %si, %si #源地址 ds:si = 0x07C0:0x0000
sub %di, %di #目标地址 es:si = 0x9000:0x0000
rep #重复执行并递减cx的值
movsw #从内存[si]处移动cx个字到[di]处
接下来使用ljmp跳转到0x9000 偏移量为go处的代码执行。
ljmp $INITSEG, $go
cs寄存器的值为0x9000。接下来的操作就是将ds,es,ss都赋值为0x9000。同时将sp设置为0xFF00。
go: mov %cs, %ax #将ds,es,ss都设置成移动后代码所在的段处(0x9000)mov %ax, %dsmov %ax, %esmov %ax, %ssmov $0xFF00, %sp # arbitrary value >>512
加载setup.s代码到0x9000:0x200处
接下来这一部分用于加载setup.s的代码到0x9000:0200处。
这里利用了BIOS的0x13号中断。
下面是关于BIOS INT 0x13在使用时的说明:
ah = 0x02 读磁盘到内存 al = 4 读4个扇区
ch: 柱面号的低8位, cl: 0-5位代表开始扇区, 6-7位 代表磁道号的高2位代表柱面的高2位。
dh 磁头号 dl 驱动器号。
如果读取成功则执行ok_load_setup。 如果不成功,则对驱动器进行复位,再次读取。
load_setup:mov $0x0000, %dx # drive 0, head 0mov $0x0002, %cx # sector 2, track 0mov $0x0200, %bx # address = 512, in INITSEG.equ AX, 0x0200+SETUPLENmov $AX, %ax # service 2, nr of sectorsint $0x13 # read itjnc ok_load_setup # ok - continuemov $0x0000, %dxmov $0x0000, %ax # reset the disketteint $0x13jmp load_setup
下面依旧是使用INT 0x13去获取一些磁盘驱动器的参数。
ah = 0x08 用于获取驱动器参数。 dl为驱动器号。
返回信息:
- 如果出错则CF置为, ah=状态码
- al = 0, al = 0
- bl为驱动器的类型 AT/PS2
- ch 最大柱面号的低8位
- cl 0-5为每磁道最大扇区数, 6-7代表柱面号高2位
- dh最大磁头数
- dl驱动器数量
- es:di 软驱磁盘参数表
ok_load_setup:mov $0x00, %dlmov $0x0800, %ax # AH=8 is get drive parametersint $0x13mov $0x00, %ch#seg csmov %cx, %cs:sectors+0 # %cs means sectors is in %csmov $INITSEG, %axmov %ax, %es
下面会使用BIOS中断0x10向终端中打印信息。
0x10中断号有多个功能
(1)读光标位置:
功能号:ah=0x03
输入:
- bh = 页号
输出: - ch = 扫描开始线
- cl = 扫描结束线
- dh = 行号
- dl = 列号
(1)打印字符串:
功能号:ah=0x013
输入:
- al = 放置光标的方式和规定属性
- es:bp 字符串位置
- cx = 显示的字符串字符数
- bh = 显示页面号
- bl = 字符属性
- dh = 行号
- dl = 列号
mov $0x03, %ah # read cursor posxor %bh, %bhint $0x10mov $30, %cxmov $0x0007, %bx # page 0, attribute 7 (normal)#lea msg1, %bpmov $msg1, %bpmov $0x1301, %ax # write string, move cursorint $0x10
加载system模块到0x1000:0x0000处
接下来,要继续读system模块到内存中。
ax = 0x1000, es = 0x1000
mov $SYSSEG, %axmov %ax, %es # segment of 0x010000call read_itcall kill_motor
read_it实际上就是将system模块存放在0x1000:0x0000处。
test执行的是0x1000 & 0x0fff = 0x0000,
read_it:mov %es, %axtest $0x0fff, %ax
die: jne die # es must be at 64kB boundaryxor %bx, %bx # bx is starting address within segment
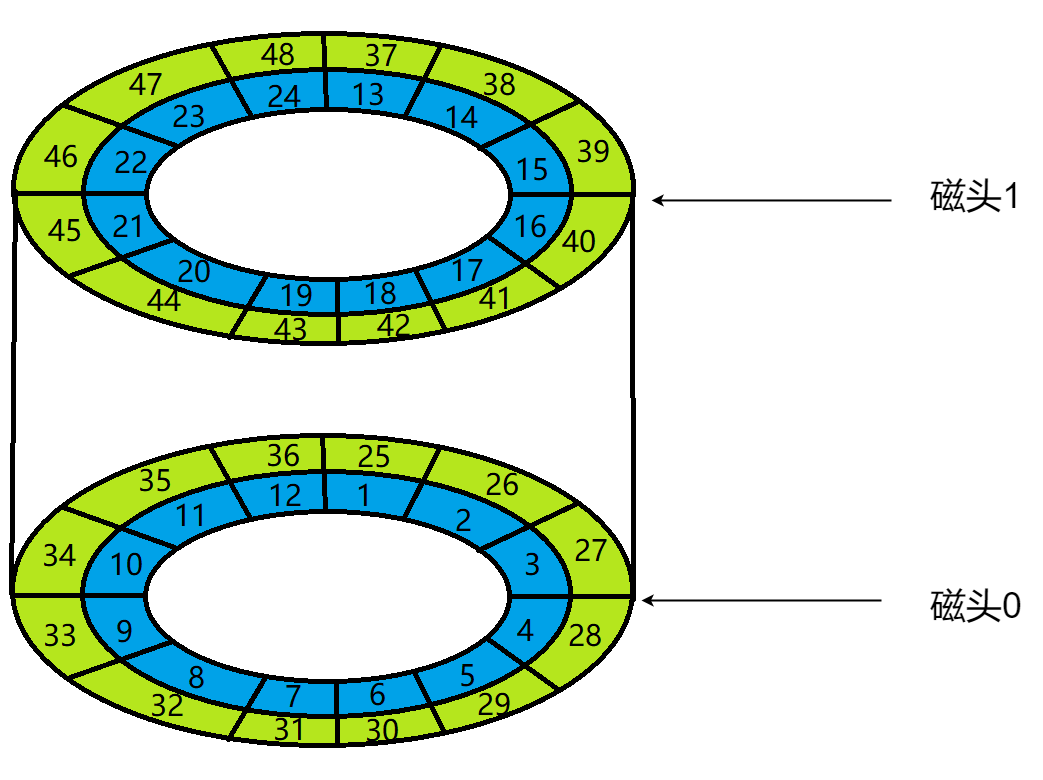
接下来rp_read的过程实际是逐磁道读取磁盘中system模块的过程。如下图所示共两个磁道,两个磁头,每磁道八个扇区,读取顺序如下所示,首先读取0磁头0磁道,然后读取1磁头0磁道,接着读取0磁头1磁道,最后读取1磁头1磁道。
rp_read首先判断是否已经读入了所有的数据(system模块)。比较ax和ENDSEG的值,如果不相等,则跳转到ok1_read中执行。
rp_read:mov %es, %axcmp $ENDSEG, %ax # have we loaded all yet?jb ok1_readret
在ok1_read中,则主要计算了当前磁道上还有多少扇区没有读取完。
ok1_read:#seg csmov %cs:sectors+0, %ax !获取每磁道的扇区数sub sread, %ax !减去当前磁道已读扇区数(bootsect + setup)mov %ax, %cx !cx = ax = 当前柱面未读扇区数shl $9, %cx !cx = cx * 512字节 + 段内偏移add %bx, %cxjnc ok2_read !调用ok2_read函数进行读取当前磁道上剩余扇区。je ok2_readxor %ax, %axsub %bx, %axshr $9, %ax
ok2_read实际的作用就是将当前磁道上的所有扇区全部读完。更具体的,就是读取开始扇区cl和需读扇区数al的数据到es:bx开始处。
ok2_read:call read_track !读当前柱面上指定开始扇区和要读的扇区数mov %ax, %cx !ax代表本次读取的扇区数,复制到cx中add sread, %ax !ax = ax + sread#seg cscmp %cs:sectors+0, %ax !如果当前磁道上还有扇区未读,则跳转到ok3_readjne ok3_readmov $1, %ax !ax = 1sub head, %ax !如果head = 0, ax = ax - head = 1,如果head = 1, ax = ax - head = 0, 即如果磁头号为0,则读取磁头面为1的扇区, 否则的话将读取下一个磁道上的数据。jne ok4_readincw track
如果当前磁道上还有扇区没有读,则会直接进入ok3_read,再次读取。否则先进入ok4_read,移动到下一个磁道或者下一个磁头进行读取。
ok4_read:mov %ax, head !保存当前的磁头号xor %ax, %ax !清除已读扇区数
ok3_read:mov %ax, sread !保存当前扇区已读扇区数shl $9, %cxadd %cx, %bxjnc rp_readmov %es, %axadd $0x1000, %axmov %ax, %esxor %bx, %bxjmp rp_read
接下来的read_track在ok2_read中被调用,其作用是读取当前磁道上的扇面到es:bx处。
回顾一下INT 0x13读取磁盘数据时的参数:
- ah = 0x02 功能号,代表读磁盘到内存
- al = 需要读出的扇区总数
- ch = 磁道(柱面)号的低8位
- cl = 0-5位代表开始扇区, 6-7位代表磁道号的高2位代表柱面的高2位。
- dh = 磁头号
- dl = 驱动器号
- es:bx = 指向数据缓冲区
- 如果出错,则CF标志位置位,ah中将存放出错码
read_track:push %ax !保存ax,bx,cx,dx寄存器push %bxpush %cxpush %dxmov track, %dx !获取当前的磁道号mov sread, %cx !获取当前磁道上的已读扇区数inc %cx !cl = 开始读的扇区号mov %dl, %ch !ch = 当前磁道号mov head, %dx !dx = 当前磁头号, 目前磁头号还在dl中,后面会挪动到dh中。mov %dl, %dh !将磁头号从dl挪动到dh中mov $0, %dl !dl = 驱动器号and $0x0100, %dx !将dx与0x0100进行按位与,实际就是使得磁头号小于等于1。mov $2, %ah !ah = 2,读磁盘扇区的功能号int $0x13 !0x13号中断, 读取磁盘数据。jc bad_rt !如果出错,则跳转运行bad_rtpop %dx !恢复dx,cx,bx,ax寄存器pop %cxpop %bxpop %axret
看到这里,我们再回到调用read_it的地方, 注意到其中的ljmp $SETUPSEG, $0,这便是跳转到了setup.s中进行执行。
mov $SYSSEG, %axmov %ax, %es # segment of 0x010000call read_it !读取磁盘上system模块call kill_motor !关闭驱动器马达#seg csmov %cs:root_dev+0, %axcmp $0, %axjne root_defined#seg csmov %cs:sectors+0, %bxmov $0x0208, %ax # /dev/ps0 - 1.2Mbcmp $15, %bxje root_definedmov $0x021c, %ax # /dev/PS0 - 1.44Mbcmp $18, %bxje root_defined
undef_root:jmp undef_root
root_defined:#seg csmov %ax, %cs:root_dev+0ljmp $SETUPSEG, $0 !跳转到SETUPSEG模块进行执行
Q & A
https://github.com/Wangzhike/HIT-Linux-0.11/blob/master/1-boot/OS-booting.md
文中如有表达不正确之处,欢迎大家与我交流
