【AI】YOLOV1原理详解
AI学习目录汇总
0、前言
YOLOv1~3作者是约瑟夫·雷德蒙(Joseph Chet Redmon),他的网站:https://pjreddie.com/
YOLOv1网站:https://pjreddie.com/darknet/yolov1/
YOLOv2网站:https://pjreddie.com/darknet/yolov2/
YOLOv3网站:https://pjreddie.com/darknet/yolo/
github:https://github.com/pjreddie/darknet
YOLOv4作者是AlexeyAB(俄),网站:https://github.com/AlexeyAB/darknet
YOLO之父Joseph Redmon因为YOLO被用于军事目的而退出,将衣钵传给了AlexeyAB
YOLOv5作者是ultralytics团队的Glenn Jocher,网站:https://github.com/ultralytics/yolov5
Glenn Jocher并没有发布YOLOv5相关论文,也不被YOLO之父Joseph Redmon认可
YOLOX作者是刘松涛
YOLOX PyTorch实现:https://github.com/Megvii-BaseDetection/YOLOX
YOLOX MegEngine实现:https://github.com/MegEngine/YOLOX
注:MegEngine是旷视深度学习框架天元
YOLOv6是由美团提出的:https://github.com/meituan/YOLOv6
YOLOv7是YOLOv4原开发团队(AlexeyAB等人)的续作,网站:https://github.com/WongKinYiu/yolov7
YOLOv8由ultralytics团队发布:
官网:https://docs.ultralytics.com/
github:https://github.com/ultralytics/ultralytics
1、简介
YOLO:You Only Look Once,一种对象检测算法,2016年由Redmon提出
优点:速度快,适合于实时检测任务;
缺点:准确度略低
2、其它算法对象检测原理
在YOLO出现之前,其它算法使用分类器对测试图像的不同切片进行评估。
例如,使用一个小窗口在图像上滑动来获取一小块图像,称为一块切片,在不同位置切出不同大小的切片后,再对这些切片进行分类处理,可以看成两个任务:找到图片中某个存在对象的区域,然后识别出该区域中具体是哪个对象。
遍历图片中所有可能的位置,地毯式搜索不同大小,不同宽高比,不同位置的每个区域,逐一检测其中是否存在某个对象,挑选其中概率最大的结果作为输出。显然这种方法效率太低。
3、YOLO原理
YOLO将图像分成NxN的格子,同时对每个格子做回归预测,输出每个格子对若干种检测目标的概率、所处的位置等信息。根据概率拼接格子就可以检测出目标的大致轮廓。
4、基本概念
4.1 神经元
神经元基本形式:y = wx + b,以下图为例:
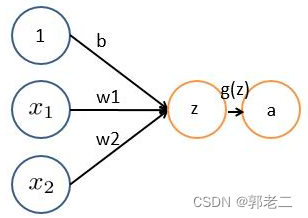
a=g(z) = g( x1 * w1 + x2 *w2 + b )
- x1、x2表示输入向量
- w1、w2为权重
- b为偏置bias
- z= x1 * w1 + x2 *w2 + b 线性组合函数
- g(z) 为激活函数
- a 为输出
4.2 激活函数
为什么要用激活函数?
如果不用激活函数,每一层输出都是上层输入的线性函数,无论神经网络有多少层,输出都是输入的线性组合,这种情况就是最原始的感知机(Perceptron)。
如果使用的话,激活函数给神经元引入了非线性因素,使得神经网络可以任意逼近任何非线性函数,这样神经网络就可以应用到众多的非线性模型中。
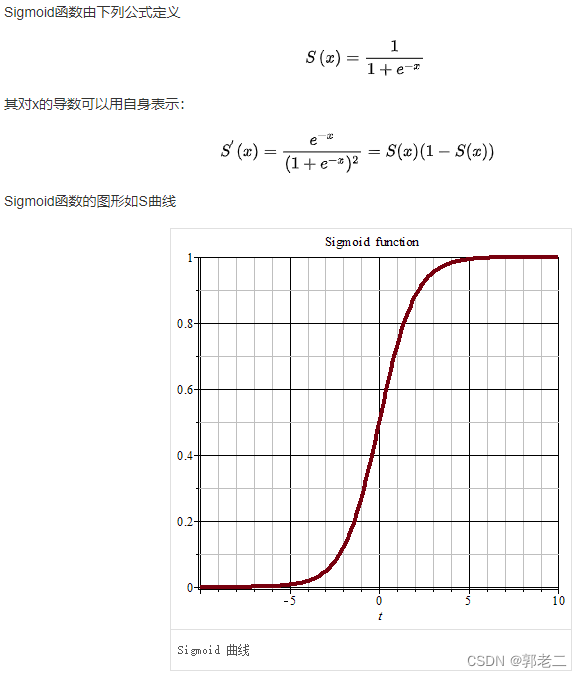
4.2.1 sigmoid
sigmoid函数也叫Logistic函数,用于隐层神经元输出,取值范围为(0,1),它可以将一个实数映射到(0,1)的区间,可以用来做二分类。在特征相差比较复杂或是相差不是特别大时效果比较好。Sigmoid作为激活函数有以下优缺点:
- 优点:平滑、易于求导。
- 缺点:激活函数计算量大,反向传播求误差梯度时,求导涉及除法;反向传播时,很容易就会出现梯度消失的情况,从而无法完成深层网络的训练。
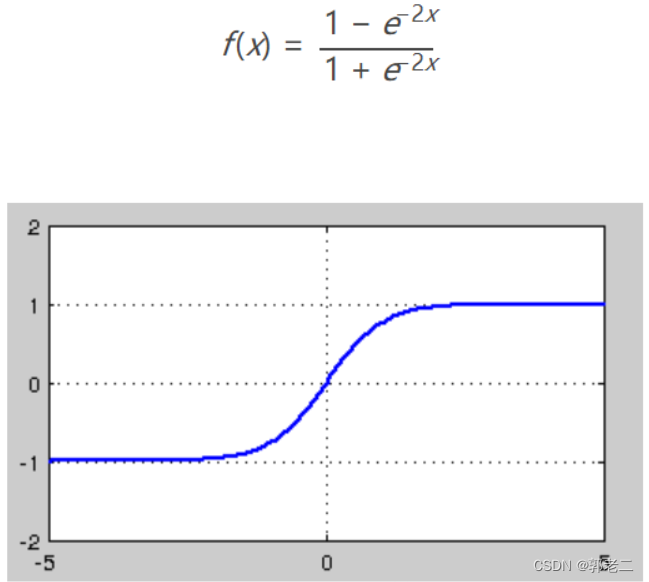
4.2.2 tanh
tanh优缺点:
- 优点:与sigmoid相比,它的输出均值是0,使得其收敛速度要比sigmoid快,减少迭代次数。
- 缺点:tanh一样具有软饱和性,从而造成梯度消失,在两边一样有趋近于0的情况
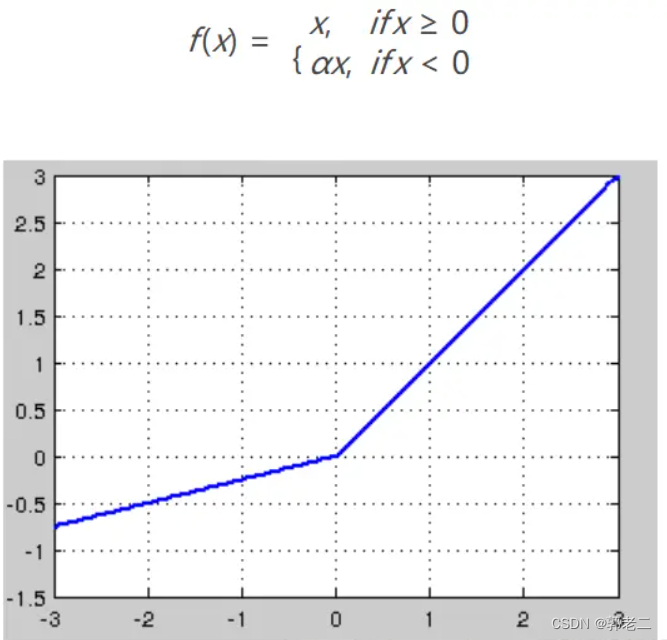
4.2.3 relu
Relu激活函数(The Rectified Linear Unit),用于隐层神经元输出。公式如下
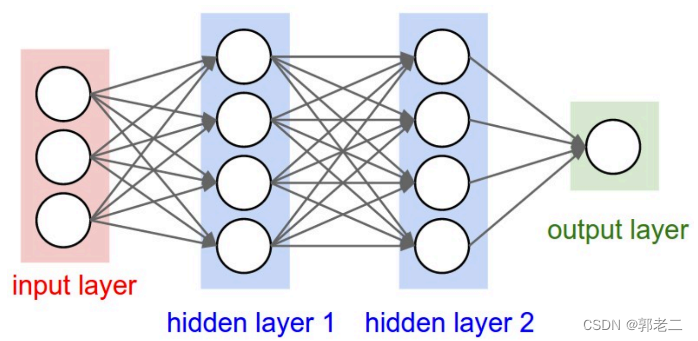
4.3 人工神经网络(DNN)
DNN层级结构如下图所示:包括1,输入层;2.隐含层(1,2,…,n);3.输出层。层级之间采用全连接(FC),激活函数一般采用sigmoid函数。优化算法一般是随机梯度下降(SGD)
4.4 卷积神经网络(CNN)
4.4.1 什么需要卷积神经网络?
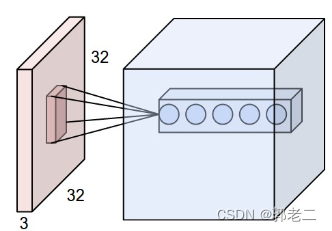
如果用普通的神经网络处理图像,一张图像的数据信息太多,输入层和隐藏层全连接时,将会产生过多的权重,例如,一张图像200x200x3(宽200,高200,颜色RGB通道数3)作为输入,和隐藏层的一个神经元将产生 2002003 = 120,000 个权重。
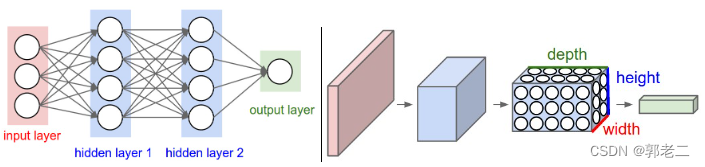
卷积神经网络以3个维度排列成3D体积的神经元:宽度、高度、深度;一层中的神经元只会连接到它之前的层的一小部分区域,如下图:
人工神经网络和卷积神经网络对比:
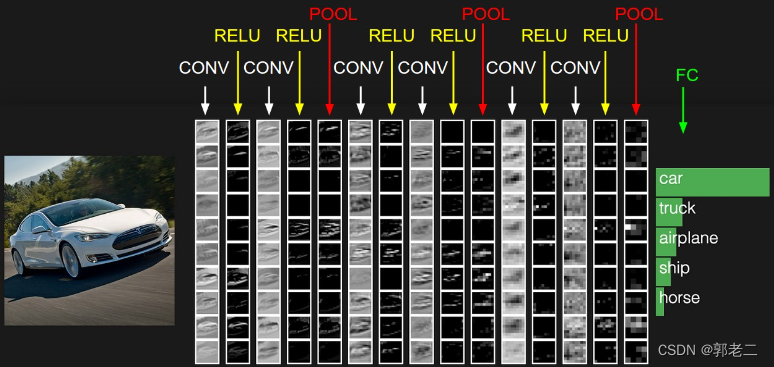
4.4.2CNN层级结构
CNN层级结构如下图所示:包括输入层,若干个(卷积层CONV+激励层(一般使用ReLU激活函数)+池化层(POOL,一般使用最大池化)),最后加一个全连接(FC),预测结果。CNN的每一层都通过可微函数将一个激活量转换为另一个激活量。
4.5 卷积层CONV
CNN笔记:通俗理解卷积神经网络
4.5.1 什么是卷积层
卷积层(Convolutional layer),卷积神经网络中每层卷积层由若干卷积单元组成,每个卷积单元的参数都是通过反向传播算法最佳化得到的。卷积运算的目的是提取输入的不同特征,第一层卷积层可能只能提取一些低级的特征如边缘、线条和角等层级,更多层的网路能从低级特征中迭代提取更复杂的特征。
4.5.2 超参
输入层的体积(宽、高、深度)受图像像素、色深限制为固定值,卷积层的体积大小怎么确认?
卷积层的体积受三个参数控制,称为超级参数:深度(depth)、步幅(stride)和零填充(zero-padding)
深度(depth):是指输出量的深度,将一组权重和偏置组成一个过滤器,有n个过滤器,通过卷积运算后将输出n个深度输出量
步幅(stride):滑动过滤器的步幅。当步幅为 1 时,将过滤器一次移动一个像素;当步幅为 2时,将过滤器一次移动两个像素
零填充(zero-padding):如果没有零填充,输出的体积将受输入的限制;人为将输入的数据边缘扩充为1个或多个0,可以控制输出体积的空间大小
4.5.3 卷积层体积计算
输入:W1×H1×D1
深度(过滤器):K
过滤器宽度:F
步幅:S
0填充:P
输出:W2×H2×D2
W2=(W1−F+2P)/S+1
H2=(H1−F+2P)/S+1
D2=K

4.5.4 计算输出
输出层体积中的每个点的值怎么计算?
例如:输入为X,体积为:X.shape: (11,11,4)
过滤器宽度:F = 5
步幅:S = 2
0填充:P = 0
过滤器:W0.shape: (5,5,4)
outV[0,0,0] = np.sum(X[:5,:5,:] * W0) + b0
outV[1,0,0] = np.sum(X[2:7,:5,:] * W0) + b0
outV[2,0,0] = np.sum(X[4:9,:5,:] * W0) + b0
outV[3,0,0] = np.sum(X[6:11,:5,:] * W0) + b0
outV[0,1,0] = np.sum(X[:5,2:5,:] * W0) + b0
outV[1,1,0] = np.sum(X[2:7,2:5,:] * W0) + b0
outV[2,1,0] = np.sum(X[4:9,2:5,:] * W0) + b0
outV[3,1,0] = np.sum(X[6:11,2:5,:] * W0) + b0
……
4.6 激励层:RELU
每个卷积层后都再更一个RELU激活层
4.7 池化层:POOL
4.7.1 池化层作用
池化层夹在连续的卷积层中间, 用于减少数据和参数的个数。
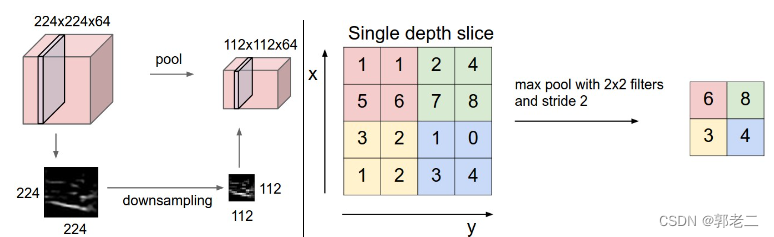
左图:大小为 [224x224x64] 的输入量经过大小为 2 、步幅为2的过滤器处理,输出量为 [112x112x64] 。请注意体积深度被保留。
右图:最常见的过滤操作是取最大值。
4.7.2 池化层体积计算
输入:W1×H1×D1
过滤器宽度:F
步幅:S
输出:W2×H2×D2
W2=(W1−F)/S+1
H2=(H1−F)/S+1
D2=D1
4.7.3 舍弃池化层
偶尔在 CONV 层中使用更大的步幅,来较少参数量,代理池化层的作用,反而训练的更好,例如变分自动编码器 (VAE) 或生成对抗网络 (GAN)。未来的架构可能会很少使用、甚至不再使用池化层。
4.8 全连接层
完全连接层中的神经元与前一层中的所有激活具有完全连接,如常规神经网络中所见。因此,它们的激活可以通过矩阵乘法和偏置偏移来计算。
4.9 过拟合
所谓过拟合(overfitting),指的是模型在训练集上表现的很好,但是在交叉验证集合测试集上表现一般,也就是说模型对未知样本的预测表现一般,泛化(generalization)能力较差。
4.10 损失函数
每一个样本经过模型后会得到一个预测值,然后得到的预测值和真实值的差值就成为损失(当然损失值越小证明模型越是成功)
最小化损失函数时,只需要使损失函数沿着负梯度前行,就能使损失函数最快下降。
梯度下降用于以最快速度、最少的步骤快速找到损失函数的极小值。
4.11 梯度下降
梯度就是导数;
梯度下降作用是找到函数的最小值所对应的自变量的值(曲线最低点对应x的值)。
梯度下降含义(具体操作)是:改变参数(权重、偏置等)的值使得导数的绝对值变小,当导数小于0时候,我们要让目前参数(权重、偏置等)值大一点点,再看它导数值。当导数大于0时候,我们要让目前参数(权重、偏置等)值减小一点点,再看它导数值。当导数接近0时候,我们就得到想要的自变量参数(权重、偏置等)了。也就是说找到这个算法最佳参数,使得拟合曲线与真实值误差最小
4.12 反向传播
参考:深度学习——反向传播(Backpropagation)
5、YOLOv1
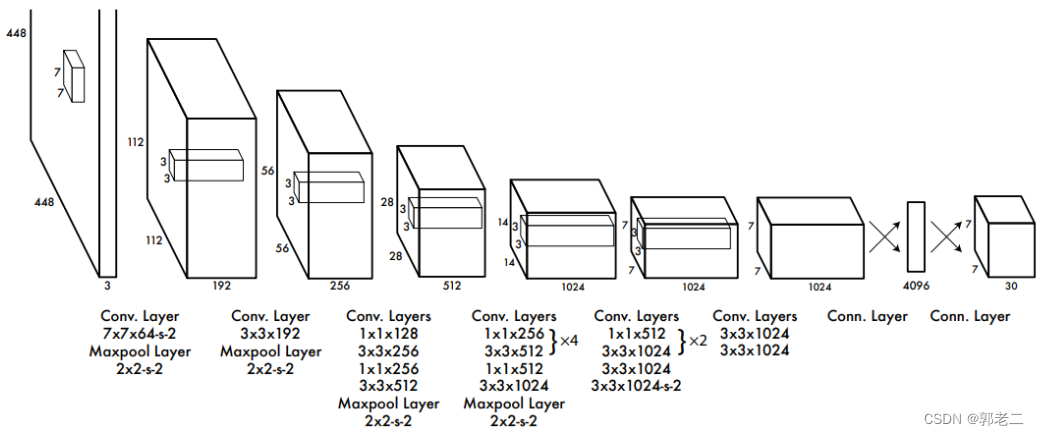
5.1 网络结构
输入层:448×448×3的彩色图片。
卷积层:由若干卷积层和最大池化层组成,用于提取图片的抽象特征。
全连接层:由两个全连接层组成,用来预测目标的位置和类别概率值。
输出层:7×7×30的预测结果。
5.2 检测原理
yolo-v1将一幅图像分成的是7x7大小的网格;
yolo-v1要求每个网格预测的是2个边界框(bounding box),每个边界框包含五个值坐标(x,y) 长宽(w,h)和置信度(confidence)
- (x,y) 表示边界框中心 相对于网格 的坐标;
- (w,h) 表示边界框 相对于整张图像 的宽和高
- 意思是边界框的中心坐标必须在网格内,但其宽和高不受网格限制、可以随意超过网格大小
- 当边界框中不存在目标时,置信度应等于0;当边界框中存在目标时,置信度应等于这一边界框和物体的真实边界框的IoU

yolo-v1默认可以预测的类别有20种,每个网格还要预测一个类别信息(C 个类)
IoU表示(真实值和预测值的交集)占(真实值和预测值的并集)的比列:

5.3 输出张量
S×S 个网格,每个网格要预测 B个边界框 ,还要预测 C 个类。输出层就是一个 S × S × (5×B+C) 的张量。对于yolo-v1,网络输出即是一个7x7x30的张量


6、YOLOV1的不足
- 每张图片能够进行分类数量太少,只有20种物体分类;
- 检测的目标的数量太少,一张图只能检测 7 * 7 = 49个目标;
- 对重叠在一起的物体检测性不好;
- YOLO对小目标的检测效果不好;