Zephyr下控制ESP32S3的GPIO口
1.关于esp32s3脚的定义
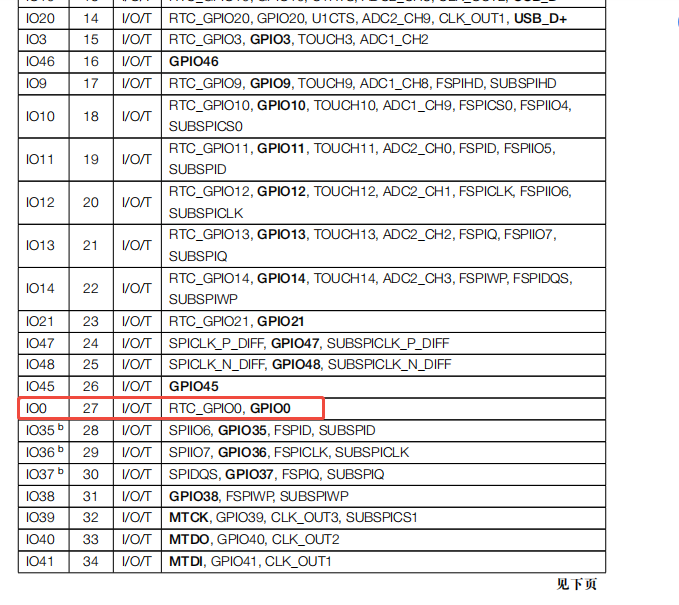
下面以GPIO38为例介绍esp32s3下GPIO口的控制,参考ESP32S3-wroom-1规格书,关于GPIO38接口的定义如下:
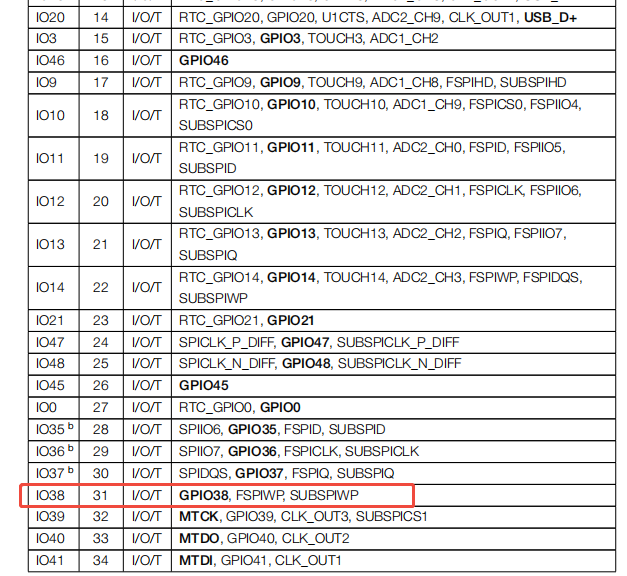
由上表可知GPIO38与SPI复用引脚
2.查看esp32s3_devkitm对应的设备树定义
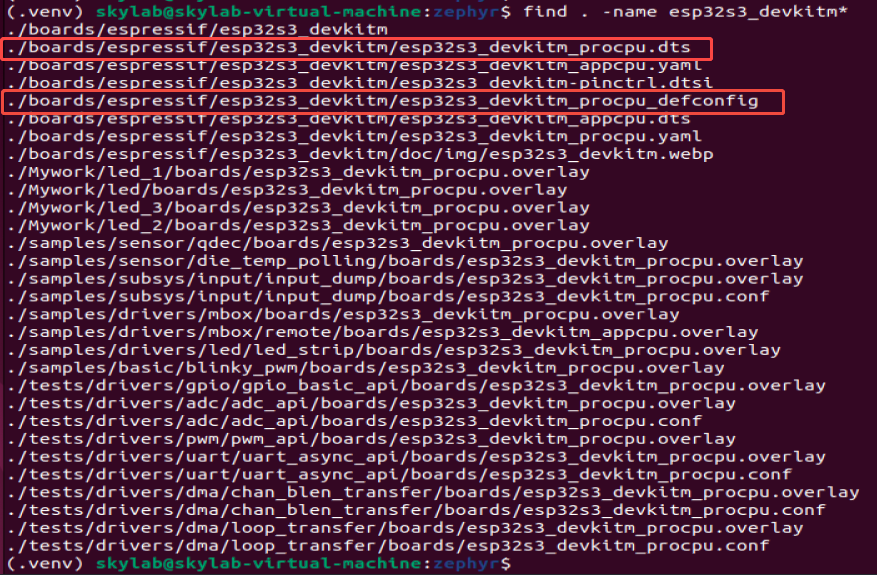
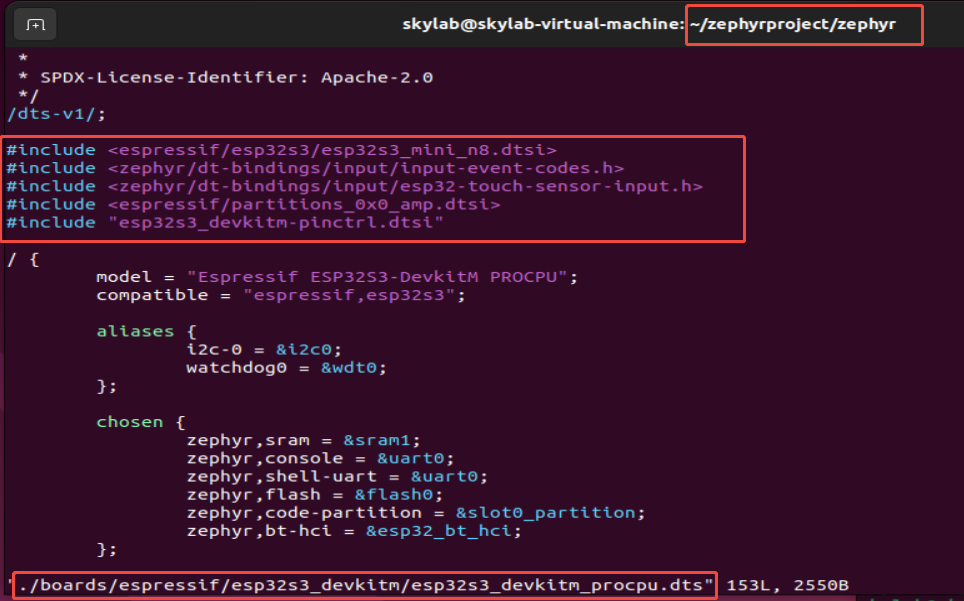
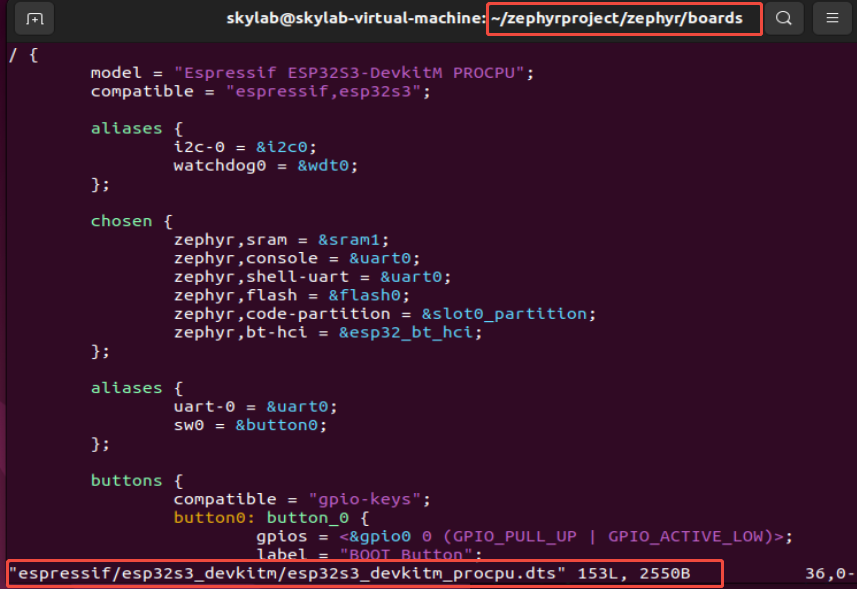
这里我选用的是esp32s3_devkitm/esp32s3/procpu,因此我查找关于这个board的dts定义,如下所示
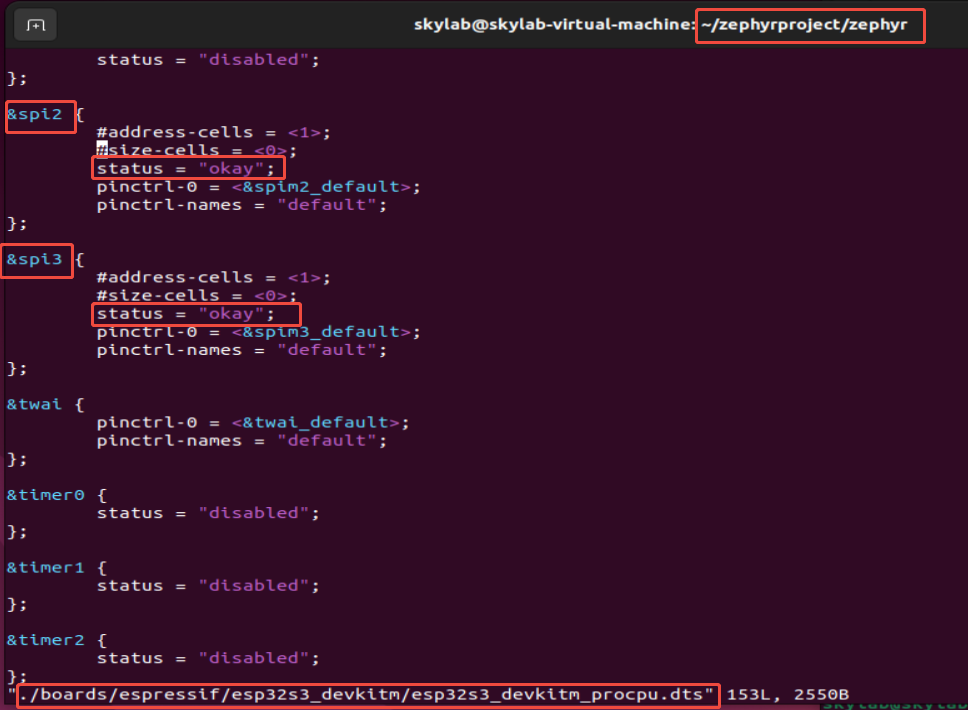
进入文件,查看关于GPIO38和SPI的定义,没有关于GPIO38的定义,SPI的定义如下,对应的SPI功能默认全部打开,需要将其禁用,让gpio功能开启:
继续查找关于GPIO的定义
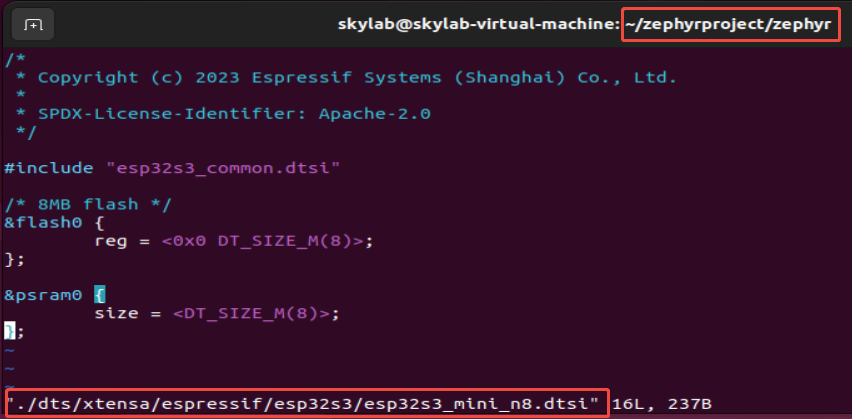
关于"esp32s3_mini_n8.dtsi"里面定义了Flash和RAM的大小
关于“esp32s3_devkitm-pinctrl.dtsi”,里面定义各个功能对应的PIN脚;
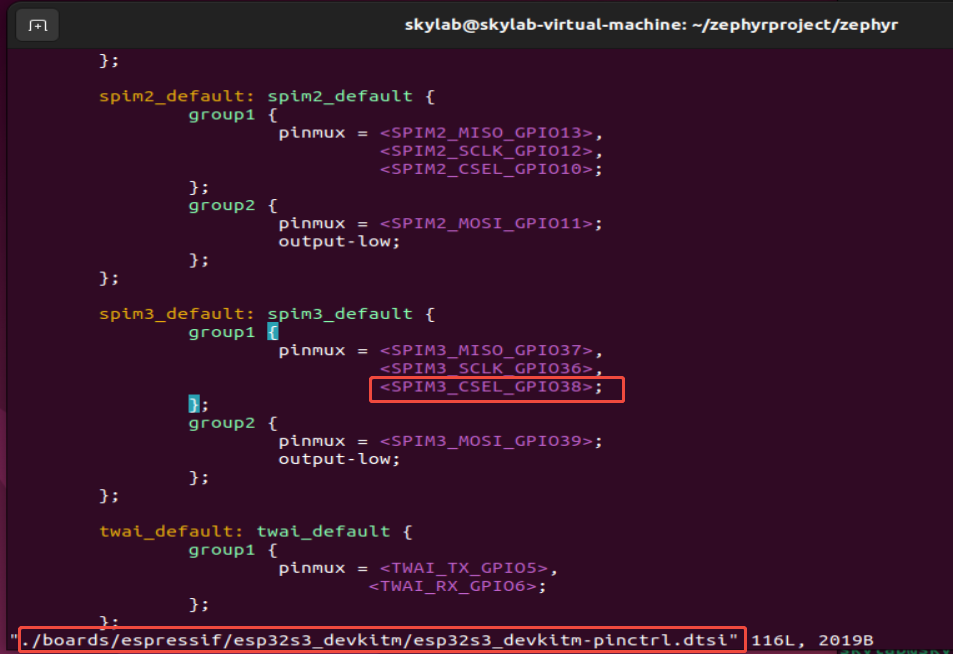
GPIO38用于SPI3的CS脚。
3.控制GPIO38对应的设备树
需要进一步获取系统关于GPIO的定义,由上可知,esp32s3_devkitm更底层,引用了esp32s3_common.dtsi,进一步查看:
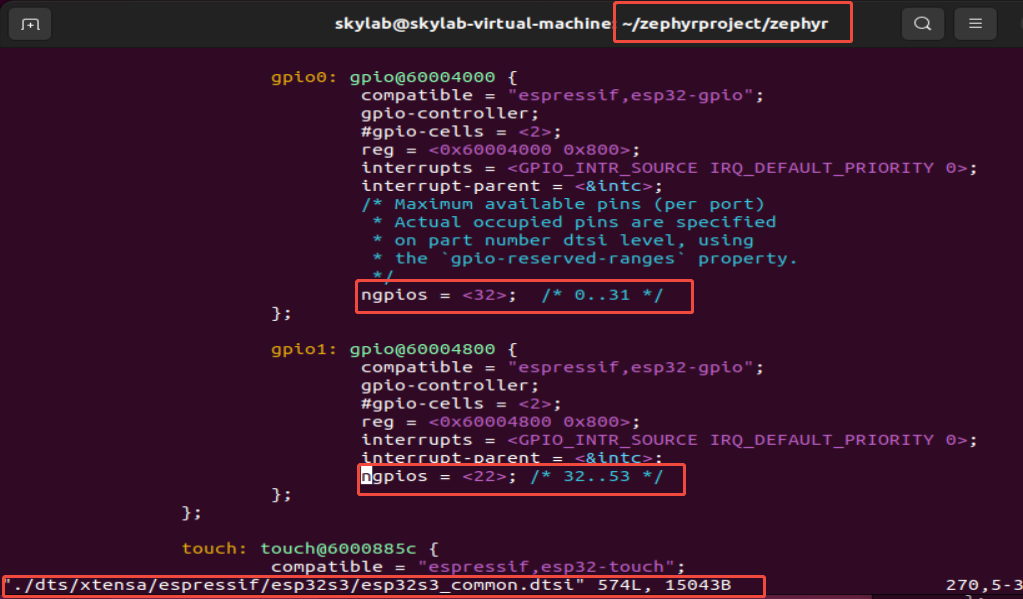
gpio0寄存器控制GPIO0-31这32个GPIO;
gpio1寄存器控制GPIO32-53这22个GPIO;
因此,选用gpio1寄存器,具体设备树定义,如下所示:
#include <zephyr/dt-bindings/gpio/gpio.h>/ {aliases {led0 = &user_led; // 别名正确指向LED节点};leds {compatible = "gpio-leds";user_led: led_0 {gpios = <&gpio1 38 GPIO_ACTIVE_LOW>;status = "okay";};};
};&spi3 {status = "disabled"; //禁用spi3,释放对应io脚
};&gpio1 {status = "okay"; // gpio1控制器必须启用
};
4.控制GPIO38
下面控制GPIO38,使其对应的LED灯亮1s,灭1s,如下所示
#include <zephyr/kernel.h>
#include <zephyr/drivers/gpio.h>#define LED0_NODE DT_ALIAS(led0)
static const struct gpio_dt_spec led = GPIO_DT_SPEC_GET(LED0_NODE, gpios);int main(void)
{int ret;bool current_state;if (!gpio_is_ready_dt(&led)) {printk("LED GPIO not ready\n");return 0;}// 配置为输出,初始高电平(灭,因GPIO_ACTIVE_LOW)ret = gpio_pin_configure_dt(&led, GPIO_OUTPUT | GPIO_PUSH_PULL);if (ret != 0) {printk("Configure failed: %d\n", ret);return 0;}while (1) {ret = gpio_pin_set_dt(&led, 1); // 1对应高电平(因ACTIVE_LOW,此时LED应灭)if (ret != 0) {printk("Set high failed: %d\n", ret);}int level = gpio_pin_get_dt(&led);printk("After set high, level = %d\n", level); // 预期应为1k_msleep(1000);printk("Testing set low...\n");ret = gpio_pin_set_dt(&led, 0); // 0对应低电平(LED应亮)if (ret != 0) {printk("Set low failed: %d\n", ret);}level = gpio_pin_get_dt(&led);printk("After set low, level = %d\n", level); // 预期应为0k_msleep(1000);}return 0;
}
ESP32-S3 的部分 GPIO(尤其是 34~39 号引脚)默认配置为输入专用模式(无内部上拉 / 下拉电阻)。如果你的 LED 连接在这类引脚上,即使配置为输出,读取电平(输入操作)时可能无法正确获取输出状态,导致gpio_pin_get_dt始终返回 0。
5.控制GPIO0做按键
代码如下:
#include <zephyr/kernel.h>
#include <zephyr/sys/printk.h>
#include <zephyr/device.h>
#include <zephyr/drivers/gpio.h>#define KEY_NODE DT_ALIAS(sw0)
static const struct gpio_dt_spec key = GPIO_DT_SPEC_GET (KEY_NODE, gpios);static int64_t last_mode_change;
volatile uint8_t pwm_mode = 1;static void change_mode(const struct device *dev, struct gpio_callback *cb, uint32_t pins)
{(void) dev;(void) cb;(void) pins;int64_t now = k_uptime_get();if (now - last_mode_change > 300) {pwm_mode = (pwm_mode)?0:1;last_mode_change = now;}
}int main(void)
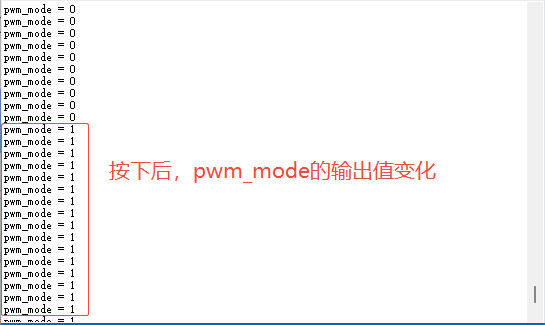
{struct gpio_callback button_cb_data;int ret;if(!gpio_is_ready_dt(&key)) {printf("Error: GPIO device not ready!\n");return -1;}ret = gpio_pin_configure_dt(&key, GPIO_INPUT);if(ret != 0) {printf("Failed to configure.key (ret = %d)\n", ret);return -1;}gpio_pin_interrupt_configure_dt(&key, GPIO_INT_EDGE_RISING);gpio_init_callback(&button_cb_data, change_mode, BIT(key.pin));gpio_add_callback(key.port, &button_cb_data);while(1) {printk("pwm_mode = %d\n", pwm_mode);}return 0;
}
运行后,执行结果如下: