【Bluedroid】A2DP控制通道UIPC机制深度解析(btif_a2dp_control_init)
本文深入剖析Android蓝牙协议栈中A2DP控制通道的UIPC(用户间进程通信)实现机制。通过分析
btif_a2dp_control_init到uipc_setup_server_locked的完整调用链,揭示Unix域套接字创建、命名空间管理、线程唤醒等核心技术,并解析跨平台适配策略如何保障蓝牙音频控制的实时性。
一、概述
A2DP 控制通道是蓝牙音频系统中传输控制命令的关键路径,负责协调音频源(如手机)与接收设备(如耳机)的交互(如播放状态切换、音量同步)。该通道基于 UIPC 框架实现进程间通信(IPC),其初始化流程涉及多个层级的技术协同,可分为以下核心阶段:
1. 初始化触发:btif_a2dp_control_init作为入口函数,通过UIPC_Init创建 UIPC 状态结构体,并调用UIPC_Open打开 A2DP 控制通道(UIPC_CH_ID_AV_CTRL),绑定控制命令回调(btif_a2dp_ctrl_cb)。
2. UIPC 框架初始化:UIPC_Init通过uipc_main_init完成基础配置,包括:
创建
socketpair(双向套接字对),用于线程间唤醒与控制信号传输;初始化通道数组(
tUIPC_CHAN),所有通道初始化为 “断开连接” 状态;配置文件描述符集合(
active_set/read_set),管理监听的套接字。
3. 主服务线程启动:uipc_start_main_server_thread创建uipc_read_task线程,作为 UIPC 的核心事件循环,负责监听套接字事件(如控制命令接收、新连接请求),实现异步消息处理。
4. 控制通道打开:UIPC_Open通过uipc_setup_server_locked创建 Unix 域套接字服务器,绑定到指定路径(/data/misc/bluedroid/.a2dp_ctrl),并将通道添加到监听集合。Android 平台采用抽象命名空间(避免创建实际文件),非 Android 平台使用文件系统路径。
5. 动态事件响应:通过uipc_wakeup_locked机制,当通道配置变更时(如新增通道),向socketpair发送唤醒信号,迫使主服务线程从select阻塞中唤醒,及时处理新事件,确保控制命令的实时性。
二、源码解析
btif_a2dp_control_init
/packages/modules/Bluetooth/system/btif/src/btif_a2dp_control.cc
#define A2DP_CTRL_PATH "/data/misc/bluedroid/.a2dp_ctrl"void btif_a2dp_control_init(void) {log::error("btif_a2dp_control_init");a2dp_uipc = UIPC_Init();UIPC_Open(*a2dp_uipc, UIPC_CH_ID_AV_CTRL, btif_a2dp_ctrl_cb, A2DP_CTRL_PATH);
}建立与音频控制相关的 UIPC(用户间进程通信)通道。为蓝牙音频控制命令(如播放、暂停、音量调节)的传输和处理奠定基础,是 A2DP 控制平面的核心初始化入口。
#define A2DP_CTRL_PATH "/data/misc/bluedroid/.a2dp_ctrl"定义了蓝牙 A2DP(高级音频分发配置文件)控制通道的 Unix 域套接字路径。该路径是 A2DP 控制平面进程间通信(UIPC)的端点,用于传输蓝牙音频控制命令(如播放、暂停、音量调节等),是 A2DP 控制通道的核心配置。
UIPC_Init
packages/modules/Bluetooth/system/udrv/ulinux/uipc.cc
/*********************************************************************************** Function UIPC_Init**** Description Initialize UIPC module**** Returns void********************************************************************************/
std::unique_ptr<tUIPC_STATE> UIPC_Init() {// 状态结构体创建std::unique_ptr<tUIPC_STATE> uipc = std::make_unique<tUIPC_STATE>();LOG_DEBUG("UIPC_Init");// 线程安全保护std::lock_guard<std::recursive_mutex> lock(uipc->mutex);// 初始化 UIPC 主模块uipc_main_init(*uipc);// 启动主服务线程,负责监听 incoming connections 和处理通信事件uipc_start_main_server_thread(*uipc);return uipc;
}创建并初始化 UIPC 状态结构体,启动主服务线程,为进程间通信建立基础框架。使用智能指针管理资源,确保内存安全,并通过互斥锁保证线程安全。

uipc_main_init
packages/modules/Bluetooth/system/udrv/ulinux/uipc.cc
/******************************************************************************* uipc helper functions*****************************************************************************/static int uipc_main_init(tUIPC_STATE& uipc) {int i;LOG_DEBUG("### uipc_main_init ###");// 1.状态结构体初始化uipc.tid = 0;uipc.running = 0;memset(&uipc.active_set, 0, sizeof(uipc.active_set));memset(&uipc.read_set, 0, sizeof(uipc.read_set));uipc.max_fd = 0;memset(&uipc.signal_fds, 0, sizeof(uipc.signal_fds));memset(&uipc.ch, 0, sizeof(uipc.ch));// 2.创建控制 socket 对/* setup interrupt socket pair */if (socketpair(AF_UNIX, SOCK_STREAM, 0, uipc.signal_fds) < 0) {return -1;}// 3.配置文件描述符集合FD_SET(uipc.signal_fds[0], &uipc.active_set);uipc.max_fd = MAX(uipc.max_fd, uipc.signal_fds[0]);// 4. 初始化通道数组for (i = 0; i < UIPC_CH_NUM; i++) {tUIPC_CHAN* p = &uipc.ch[i];p->srvfd = UIPC_DISCONNECTED;p->fd = UIPC_DISCONNECTED;p->task_evt_flags = 0;p->cback = NULL;}LOG_WARN("### uipc_main_init - Initialization completed successfully ###");return 0;
}设置 UIPC 主服务的基础状态,创建控制用的 socket 对,并初始化所有通信通道。通过 socketpair 机制实现线程间通信,为后续的消息处理和通道管理奠定基础。
使用
socketpair创建一对 Unix 域套接字uipc.signal_fds[0]用于读取,uipc.signal_fds[1]用于写入这对 socket 用于线程间通信,发送控制信号(如退出请求)
1. 线程间通信机制
socketpair 的作用:
主服务线程通过监听
uipc.signal_fds[0]接收控制信号其他线程通过向
uipc.signal_fds[1]写入数据触发事件实现无锁的线程间通信,避免轮询,降低 CPU 使用率
2. 文件描述符集合管理
uipc.active_set:维护所有活动的文件描述符
uipc.read_set:在每次select()调用前从active_set复制而来
uipc.max_fd:记录最大文件描述符值,优化select()调用范围3. 通道状态管理
typedef struct {int srvfd;int fd;int read_poll_tmo_ms;int task_evt_flags; /* event flags pending to be processed in read task */tUIPC_RCV_CBACK* cback; } tUIPC_CHAN;
tUIPC_CHAN结构体包含:
srvfd:服务端监听套接字
fd:客户端连接套接字
task_evt_flags:事件标志位
cback:消息回调函数所有通道初始化为
UIPC_DISCONNECTED状态
uipc_start_main_server_thread
packages/modules/Bluetooth/system/udrv/ulinux/uipc.cc
int uipc_start_main_server_thread(tUIPC_STATE& uipc) {uipc.running = 1; // 表示线程即将启动// 创建线程if (pthread_create(&uipc.tid, (const pthread_attr_t*)NULL, uipc_read_task,&uipc) != 0) {LOG_ERROR("uipc_thread_create pthread_create failed:%d", errno);return -1;}return 0;
}创建并启动 UIPC 主服务线程。该线程通过监听文件描述符(包括控制 socket 和通信通道)实现异步消息处理,是 UIPC 通信框架的核心执行单元。

UIPC_Open
packages/modules/Bluetooth/system/udrv/ulinux/uipc.cc
/*********************************************************************************** Function UIPC_Open**** Description Open UIPC interface**** Returns true in case of success, false in case of failure.********************************************************************************/
bool UIPC_Open(tUIPC_STATE& uipc, tUIPC_CH_ID ch_id, tUIPC_RCV_CBACK* p_cback,const char* socket_path) {LOG_DEBUG("UIPC_Open : ch_id %d", ch_id);std::lock_guard<std::recursive_mutex> lock(uipc.mutex);if (ch_id >= UIPC_CH_NUM) {return false;}// 通道状态检查if (uipc.ch[ch_id].srvfd != UIPC_DISCONNECTED) {LOG_DEBUG("CHANNEL %d ALREADY OPEN", ch_id);return 0;}// 设置服务器套接字uipc_setup_server_locked(uipc, ch_id, socket_path, p_cback);return true;
}蓝牙 UIPC(用户间进程通信)模块的通道打开函数,负责创建并初始化指定 ID 的通信通道。通过 Unix 域套接字建立进程间通信路径,为后续的数据传输提供基础。它采用线程安全设计,确保在多线程环境下正确管理通道资源。
uipc_setup_server_locked
packages/modules/Bluetooth/system/udrv/ulinux/uipc.cc
static int uipc_setup_server_locked(tUIPC_STATE& uipc, tUIPC_CH_ID ch_id,const char* name, tUIPC_RCV_CBACK* cback) {int fd;LOG_DEBUG("SETUP CHANNEL SERVER %d", ch_id);if (ch_id >= UIPC_CH_NUM) return -1;// 1. 获取互斥锁std::lock_guard<std::recursive_mutex> guard(uipc.mutex);// 2. 创建服务器套接字fd = create_server_socket(name);if (fd < 0) {LOG_ERROR("failed to setup %s: %s", name, strerror(errno));return -1;}// 3. 更新文件描述符集合LOG_DEBUG("ADD SERVER FD TO ACTIVE SET %d", fd);FD_SET(fd, &uipc.active_set);uipc.max_fd = MAX(uipc.max_fd, fd);// 4. 配置通道状态uipc.ch[ch_id].srvfd = fd;uipc.ch[ch_id].cback = cback;uipc.ch[ch_id].read_poll_tmo_ms = DEFAULT_READ_POLL_TMO_MS;// 5. 唤醒主服务线程/* trigger main thread to update read set */uipc_wakeup_locked(uipc);return 0;
}创建 Unix 域套接字服务器并配置监听。在互斥锁保护下执行,确保线程安全,并通过唤醒主服务线程更新监听集合,实现通道的动态添加。
create_server_socket
packages/modules/Bluetooth/system/udrv/ulinux/uipc.cc
static inline int create_server_socket(const char* name) {// 1. 创建套接字int s = socket(AF_LOCAL, SOCK_STREAM, 0);if (s < 0) return -1;LOG_DEBUG("create_server_socket %s", name);// 2. 绑定套接字地址if (osi_socket_local_server_bind(s, name,
#ifdef __ANDROID__ANDROID_SOCKET_NAMESPACE_ABSTRACT
#else // !__ANDROID__ANDROID_SOCKET_NAMESPACE_FILESYSTEM
#endif // __ANDROID__) < 0) {LOG_DEBUG("socket failed to create (%s)", strerror(errno));close(s);return -1;}// 3. 设置监听状态if (listen(s, 5) < 0) {LOG_DEBUG("listen failed: %s", strerror(errno));close(s);return -1;}LOG_DEBUG("created socket fd %d", s);return s;创建 Unix 域套接字服务器并配置监听。根据平台特性选择抽象命名空间或文件系统路径,实现进程间通信通道的初始化。
Unix 域套接字类型
抽象命名空间(Android):
套接字路径不以
/开头,不创建实际文件路径仅存在于内核空间,进程退出后自动消失
安全性更高,避免文件权限管理问题
文件系统路径(非 Android):
需确保路径目录存在且有写入权限
套接字文件创建后需手动删除(或通过
unlink)可能受文件系统限制(如路径长度)

osi_socket_local_server_bind
packages/modules/Bluetooth/system/osi/src/socket_utils/socket_local_server.cc
/*** Binds a pre-created socket(AF_LOCAL) 's' to 'name'* returns 's' on success, -1 on fail** Does not call listen()*/
int osi_socket_local_server_bind(int s, const char* name, int namespaceId) {struct sockaddr_un addr;socklen_t alen;int n;int err;// 1.创建套接字地址结构err = osi_socket_make_sockaddr_un(name, namespaceId, &addr, &alen);if (err < 0) {return -1;}// 2.处理文件系统路径
/* basically: if this is a filesystem path, unlink first */
#if !defined(__linux__)if (1) {
#elseif (namespaceId == ANDROID_SOCKET_NAMESPACE_RESERVED ||namespaceId == ANDROID_SOCKET_NAMESPACE_FILESYSTEM) {
#endif/*ignore ENOENT*/unlink(addr.sun_path);}// 3.设置套接字选项n = 1;setsockopt(s, SOL_SOCKET, SO_REUSEADDR, &n, sizeof(n));// 4. 执行绑定操作if (bind(s, (struct sockaddr*)&addr, alen) < 0) {return -1;}return s;
}将已创建的套接字与指定名称(路径)关联。支持两种命名空间:抽象命名空间(Android 特有)和文件系统命名空间,并在绑定前处理了文件系统路径的清理工作,确保绑定操作的可靠性。
抽象命名空间与文件系统路径对比:
| 特性 | 抽象命名空间 | 文件系统路径 |
| 路径格式 | 以空字符开头(sun_path[0] = 0) | 常规文件路径(如/tmp/socket) |
| 文件系统操作 | 无 | 需要创建 / 删除文件 |
| 权限管理 | 由内核控制 | 依赖文件系统权限 |
| 进程退出后 | 自动清理 | 需手动清理残留文件 |
| 兼容性 | Linux/Android 特有 | 所有 Unix 系统 |
osi_socket_make_sockaddr_un
packages/modules/Bluetooth/system/osi/src/socket_utils/socket_local_client.cc
#define FILESYSTEM_SOCKET_PREFIX "/tmp/"
#define ANDROID_RESERVED_SOCKET_PREFIX "/dev/socket/"/* Documented in header file. */
int osi_socket_make_sockaddr_un(const char* name, int namespaceId,struct sockaddr_un* p_addr, socklen_t* alen) {memset(p_addr, 0, sizeof(*p_addr));size_t namelen;switch (namespaceId) {case ANDROID_SOCKET_NAMESPACE_ABSTRACT: // 抽象命名空间处理
#if defined(__linux__)namelen = strlen(name);// Test with length +1 for the *initial* '\0'.if ((namelen + 1) > sizeof(p_addr->sun_path)) {goto error;}/** Note: The path in this case is *not* supposed to be* '\0'-terminated. ("man 7 unix" for the gory details.)*/p_addr->sun_path[0] = 0; // 抽象命名空间标记(空字符开头)memcpy(p_addr->sun_path + 1, name, namelen);
#else/* this OS doesn't have the Linux abstract namespace */// 非Linux系统不支持抽象命名空间,降级为文件系统路径namelen = strlen(name) + strlen(FILESYSTEM_SOCKET_PREFIX);/* unix_path_max appears to be missing on linux */if (namelen >sizeof(*p_addr) - offsetof(struct sockaddr_un, sun_path) - 1) {goto error;}strcpy(p_addr->sun_path, FILESYSTEM_SOCKET_PREFIX);strcat(p_addr->sun_path, name);
#endifbreak;case ANDROID_SOCKET_NAMESPACE_RESERVED: // 保留命名空间处理// 拼接系统预留前缀(如/dev/socket/,Android 系统中由 init 进程管理的特殊路径)namelen = strlen(name) + strlen(ANDROID_RESERVED_SOCKET_PREFIX);/* unix_path_max appears to be missing on linux */if (namelen >sizeof(*p_addr) - offsetof(struct sockaddr_un, sun_path) - 1) {goto error;}strcpy(p_addr->sun_path, ANDROID_RESERVED_SOCKET_PREFIX);strcat(p_addr->sun_path, name);break;case ANDROID_SOCKET_NAMESPACE_FILESYSTEM: // 文件系统命名空间处理namelen = strlen(name);/* unix_path_max appears to be missing on linux */if (namelen >sizeof(*p_addr) - offsetof(struct sockaddr_un, sun_path) - 1) {goto error;}strcpy(p_addr->sun_path, name);break;default:// invalid namespace idreturn -1;}// 地址结构收尾p_addr->sun_family = AF_LOCAL; // 设置为Unix域套接字*alen = namelen + offsetof(struct sockaddr_un, sun_path) + 1; // 计算地址长度return 0;
error:return -1;
}根据不同的命名空间(namespaceId)处理路径格式,确保套接字地址符合对应命名空间的规范,为后续的bind操作提供正确的地址结构。是跨平台适配的关键,支持 Android 特有的抽象命名空间、保留命名空间和通用文件系统命名空间。
命名空间语义:
| 命名空间常量 | 适用场景 | 路径特点 |
| ABSTRACT | Android/Linux 系统内部通信 | 抽象路径(无实际文件) |
| RESERVED | Android 系统服务间通信 | 系统预留路径(如/dev/socket/) |
| FILESYSTEM | 通用跨平台通信 | 常规文件系统路径 |
uipc_wakeup_locked
packages/modules/Bluetooth/system/udrv/ulinux/uipc.cc
static inline void uipc_wakeup_locked(tUIPC_STATE& uipc) {// 准备唤醒信号, 信号内容不影响唤醒效果,仅需触发 socket 的可读事件char sig_on = 1; LOG_DEBUG("UIPC SEND WAKE UP");// 发送唤醒信号OSI_NO_INTR(send(uipc.signal_fds[1], &sig_on, sizeof(sig_on), 0));
}通过向 UIPC 控制通道(socketpair)发送一个唤醒信号,迫使阻塞在select()或poll()中的主服务线程立即返回,从而及时处理新的事件(如新增的通信通道、配置变更等)。
1. 唤醒机制原理
主服务线程通常阻塞在
select(uipc.max_fd + 1, &uipc.read_set, ...),等待文件描述符事件当
uipc_wakeup_locked向signal_fds[1]发送数据后:signal_fds[0]变为可读状态select()立即返回,主服务线程从阻塞中唤醒
唤醒后,主服务线程会重新检查所有文件描述符(包括新增的通道),处理最新事件
2. socketpair 的作用
socketpair创建的一对套接字用于线程间通信:主服务线程监听
signal_fds[0]其他线程通过
signal_fds[1]发送控制信号
相比其他唤醒方式(如信号量),socketpair 的优势在于:
可无缝集成到
select()/poll()的事件循环中支持携带简单数据(此处仅用 1 字节作为 "唤醒标记")
跨平台兼容性好(所有 Unix-like 系统支持)
3. 线程安全保证
函数名中的
_locked后缀表明:调用该函数前必须持有uipc.mutex互斥锁确保在修改 UIPC 状态(如添加新通道)后,唤醒操作的原子性
避免主服务线程在状态更新过程中被唤醒,导致处理不完整的配置
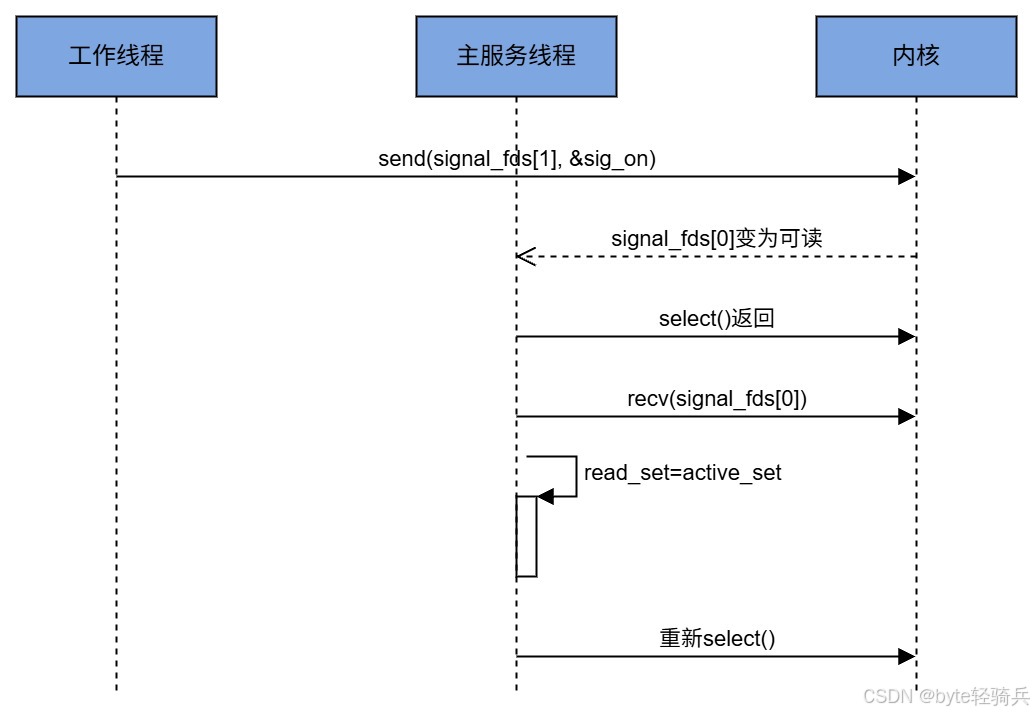
4. 主服务线程响应流程
uipc_read_task() [主服务线程]→ select()阻塞等待事件→ 收到uipc_wakeup_locked发送的信号→ select()返回,检测到signal_fds[0]可读→ 读取并忽略信号内容(仅需唤醒)→ 更新read_set为最新的active_set→ 继续select()监听5. OSI_NO_INTR
packages/modules/Bluetooth/system/osi/include/osi.h
// Re-run |fn| system call until the system call doesn't cause EINTR.
#define OSI_NO_INTR(fn) \do { \} while ((fn) == -1 && errno == EINTR)通过循环重试机制,确保被中断的系统调用(如 send, recv, select 等)能够自动恢复执行,避免因信号干扰导致的操作失败,提高系统的稳定性和可靠性。
使用
do-while循环确保至少执行一次系统调用若系统调用返回
-1且errno为EINTR,则重试适用于所有可能被信号中断的系统调用
①信号中断问题:
在 Unix/Linux 系统中,当进程接收到信号时,正在执行的系统调用可能会被中断
被中断的系统调用通常返回
-1,并设置errno为EINTR这种情况下,系统调用可能只执行了部分操作,需要重新发起
②完整调用链示例:
packages/modules/Bluetooth/system/osi/include/osi.h
// Re-run |fn| system call until the system call doesn't cause EINTR.
#define OSI_NO_INTR(fn) \do { \} while ((fn) == -1 && errno == EINTR)③信号处理流程:
系统调用(如select)执行
进程接收到信号
系统调用被中断,返回-1,errno=EINTR
OSI_NO_INTR宏捕获中断,重试系统调用
系统调用成功返回或遇到其他错误
三、时序图
UIPC 初始化关键函数调用时序:
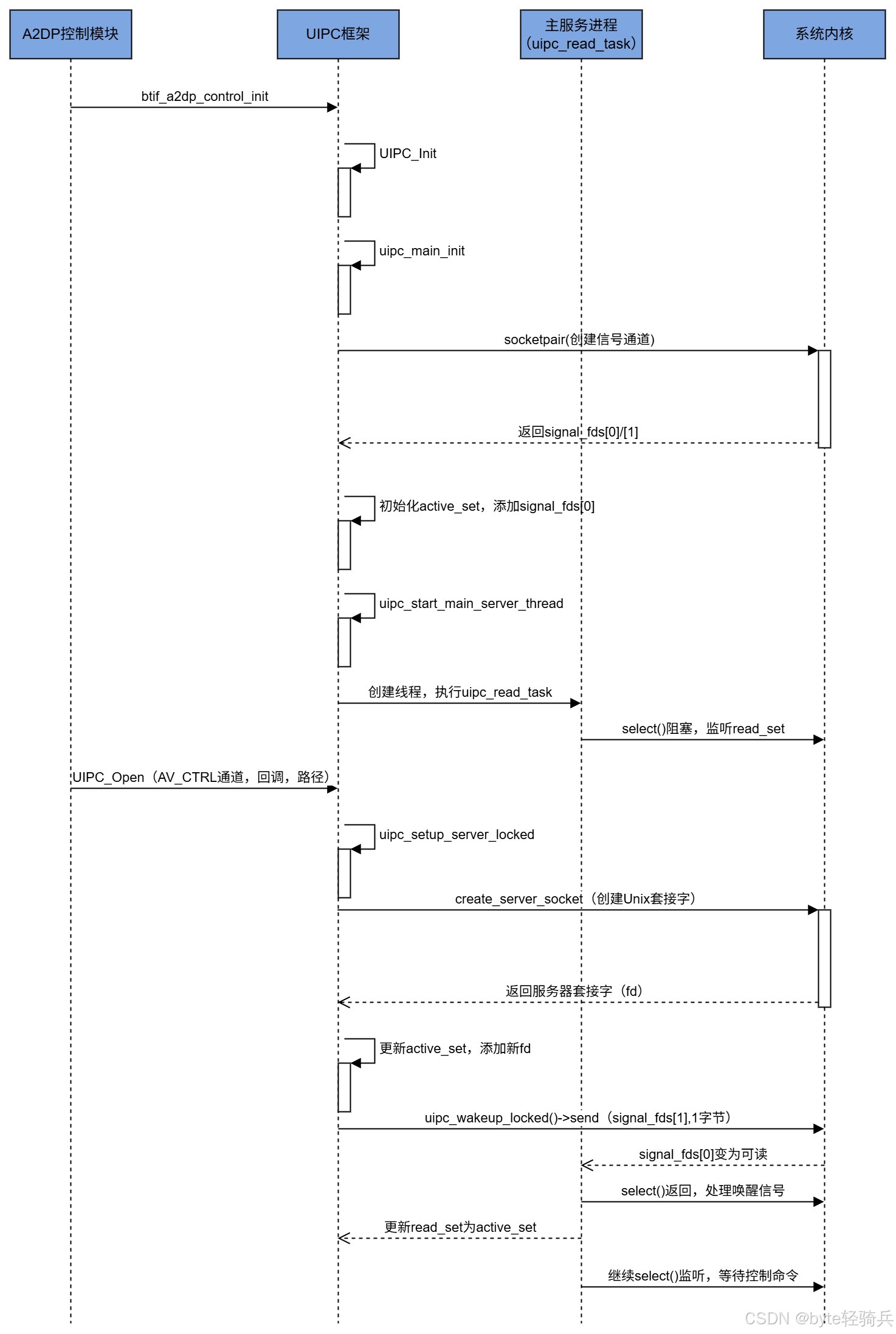
唤醒机制工作原理:
A2DP 控制通道的 UIPC 初始化是蓝牙音频控制平面的基础,其核心技术亮点包括:
1. 跨进程通信的可靠实现:通过 Unix 域套接字(抽象命名空间 / 文件系统路径)构建进程间通信通道,Android 平台采用抽象命名空间避免文件权限问题,非 Android 平台兼容文件系统路径,确保跨平台适配。
2. 线程安全与事件驱动:
递归互斥锁(
uipc.mutex)保护通道配置与状态更新,避免多线程竞争;uipc_read_task线程作为事件循环,通过select监听套接字事件,实现异步命令处理,降低 CPU 占用。
3. 动态唤醒机制:uipc_wakeup_locked通过socketpair向主服务线程发送信号,解决select阻塞导致的事件延迟问题,确保通道配置变更后能及时响应新命令。
4. 模块化设计:UIPC 框架通过通道抽象(tUIPC_CHAN)、回调机制(tUIPC_RCV_CBACK)实现控制命令的解耦处理,支持多通道并行管理(如控制通道与音频数据通道分离)。
这些技术共同保障了 A2DP 控制命令(如播放、暂停)的实时传输与可靠处理,是蓝牙音频设备交互的核心基础设施,直接影响用户对蓝牙音频控制的响应体验(如按键延迟、状态同步准确性)。