GEEPython-demo1:利用Sentinel-2监测北京奥林匹克森林公园2024年NDVI变化(附Python版)
01 说明
1.1 逻辑和流程
简要流程:
- 获取2024年覆盖北京奥林匹克森林公园的所有Sentinel-2影像
- 对所有不同时间段的影像分别计算NDVI
- 对于同一时间段的影像,取公园内所有像元NDVI值的中位数作为该时间点的NDVI
- 将所有时间点的NDVI综合绘制折线图
- 地图上展示公园的真彩色Sentinel-2图层和NDVI图层
ps: 提供JS版本和Python版本(在Pycharm中可正常运行, colab未尝试)参考学习,二者逻辑基本保持一致.
1.2 数据集说明
使用的数据集为: Harmonized Sentinel-2 MSl:MultiSpectral Instrument, Level-2A (SR)(SR表示表面反射率即地表反射率, TOA版本为大气层顶反射率<包含大气层的影响>).
使用到的相关波段信息如下:
| 波段名称 | 描述 | 分辨率 | 比例系数 |
|---|---|---|---|
| B2 | Blue | 10 meters | 0.0001 |
| B3 | Green | 10 meters | 0.0001 |
| B4 | Red | 10 meters | 0.0001 |
| B8 | NIR | 10meters | 0.0001 |
其中,比例系数0.0001与像元DN值相乘即可得到真正的Sentinel-2表面反射率(原始值通过整数存储节省存储,通过0.0001缩放回来)
Sentinel-2中存在属性CLOUDY_PIXEL_PERCENTAGE表示影像的云覆盖率(单位为%)。
02 JS代码
/*
demo1 利用Sentinel-2监测北京奥林匹克森林公园2024年NDVI变化北京奥林匹克森林公园经度: 116.388768°E, 纬度: 39.988588°N
*/// 准备
var start_date = '2024-01-01';
var end_date = '2024-12-31'
var pt = ee.Geometry.Point([116.388768, 39.988588]); // 定义矢量点
var roi = pt.buffer(2000); // 2000m缓冲区
var vis_ture_color = { // 真彩色显示参数bands: ['B4', 'B3', 'B2'],min: 0,max: 1,gamma: 1.6
}
var vis_ndvi = { // NDVI显示参数bands: 'NDVI',min: 0, max: 1,palette: ['white', 'green', 'yellow']
}// 获取sentinel-2的影像集合
var s2_collection = ee.ImageCollection("COPERNICUS/S2_SR_HARMONIZED").filterBounds(roi) // 按空间范围筛选.filterDate(start_date, end_date) // 按时间范围筛选.filter(ee.Filter.lt('CLOUDY_PIXEL_PERCENTAGE', 20)); // 筛选小于20%云覆盖的影像// 计算NDVI
var add_ndvi = function(img){var ndvi = img.normalizedDifference(['B8', 'B4']).rename('NDVI'); // 计算NDVIreturn img.addBands([ndvi]); // 返回添加了NDVI波段的img
}
var s2_ndvi = s2_collection.map(add_ndvi).select('NDVI');// 绘制ndvi
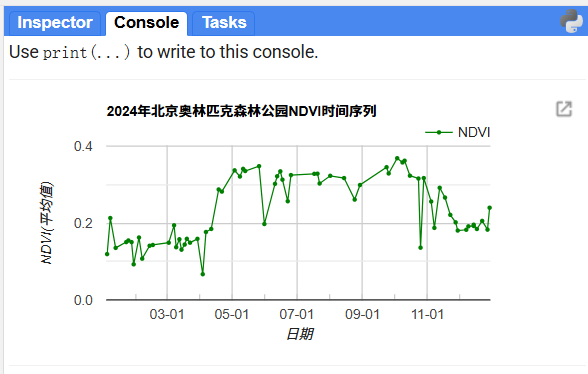
var ndvi_chart = ui.Chart.image.series({imageCollection: s2_ndvi, // 必填region: roi, // 必填reducer: ee.Reducer.mean(), // 默认就是该参数, 可不填scale: 30, // 在30m的分辨率进行reducer(此处即在30m分辨率下进行均值计算), 可不填xProperty: 'system:time_start' // 默认就是该参数
})
// 为绘制的ndvi添加样式
ndvi_chart.setOptions({title: '2024年北京奥林匹克森林公园NDVI时间序列',vAxis: {title: 'NDVI(平均值)', viewWindow: {min: 0, max: null}},hAxis: {title: '日期', format: 'MM-dd', gridlines: {count: 10}},series:{0: {color: 'green',lineWidth: 1,pointSize: 1.5,pointShape: 'cicrle'}}
})
// 在控制台显示该图表
print(ndvi_chart)// 地图显示
var img_median = s2_collection.median().clip(roi).multiply(0.0001); // 中位数合成
var ndvi_median = s2_ndvi.median().clip(roi); // 中位数合成ndvi
Map.centerObject(roi, 14);
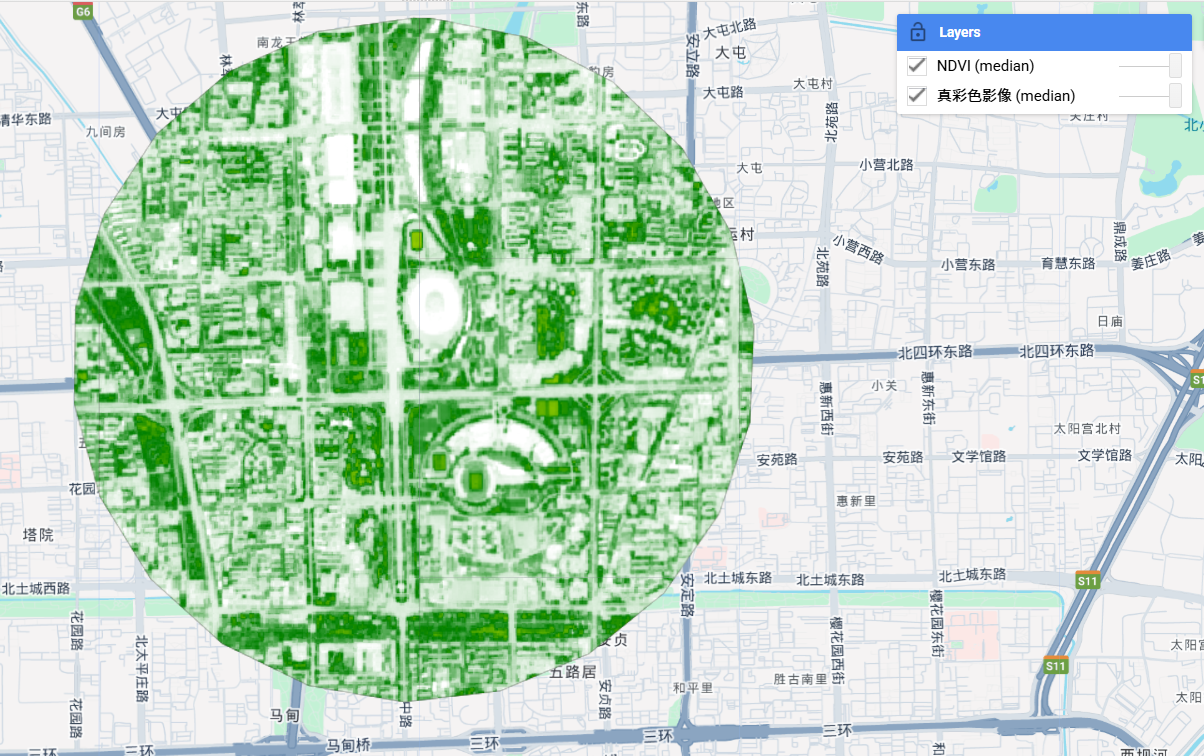
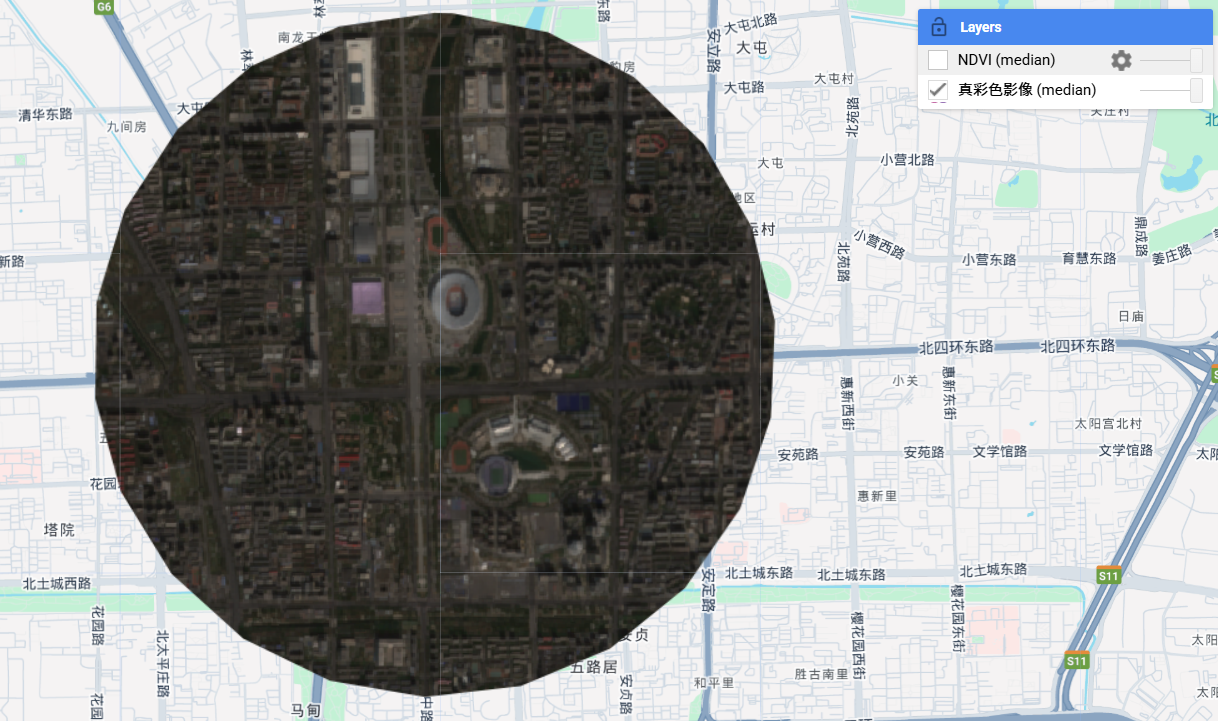
Map.addLayer(img_median, vis_ture_color, '真彩色影像 (median)');
Map.addLayer(ndvi_median, vis_ndvi, 'NDVI (median)');
结果展示:
03 Python代码
#%% md
# demo1 利用Sentinel-2监测北京奥林匹克森林公园2024年NDVI变化北京奥林匹克森林公园经度: 116.388768°E, 纬度: 39.988588°N
#%%
import geemap
import ee
from matplotlib import pyplot as plt
from matplotlib import dates as mdates
import pandas as pd
#%%
# 准备
start_date = '2024-01-01'
end_date = '2024-12-31'
pt = ee.Geometry.Point([116.388768, 39.988588]) # 定义矢量点
roi = pt.buffer(2000) # 做2000m缓冲区视为北京奥林匹克森林公园区域
#%%
# 获取Sentinel-2影像集合
s2_collection = (ee.ImageCollection("COPERNICUS/S2_SR_HARMONIZED").filterDate(start_date, end_date) # 筛选时间范围.filterBounds(roi) # 筛选空间范围.filter(ee.Filter.lt('CLOUDY_PIXEL_PERCENTAGE', 20)) # 保留云覆盖率小于20%的影像# .map(lambda img: img.normalizedDifference(['B8', 'B4']).rename('NDVI'))# .select('NDVI'))
#%%
# 计算NDVI
def add_ndvi(img):ndvi = img.normalizedDifference(['B8', 'B4']).rename('NDVI') # 计算NDVI并修改为波段名称为NDVIreturn img.addBands(ndvi) # 添加NDVI波段
s2_ndvi = s2_collection.map(add_ndvi).select('NDVI')
#%%
# 获取roi的NDVI均值(中位数)
def extract_roi_ndvi(img):stats = img.reduceRegion(reducer=ee.Reducer.median(), # 计算的统计量geometry=roi, # 统计的区域scale=30 # 允许在30m分辨率进行统计而非此处s2的10m分辨率)return ee.Feature(None).set(stats).set('date', img.date().format('YYYY-MM-dd'))s2_ndvi_f = s2_ndvi.map(extract_roi_ndvi)
ndvi_list = [p['properties'] for p in s2_ndvi_f.getInfo()['features']]
ndvi_df = pd.DataFrame(ndvi_list).sort_values('date').set_index('date')
ndvi_df
#%%
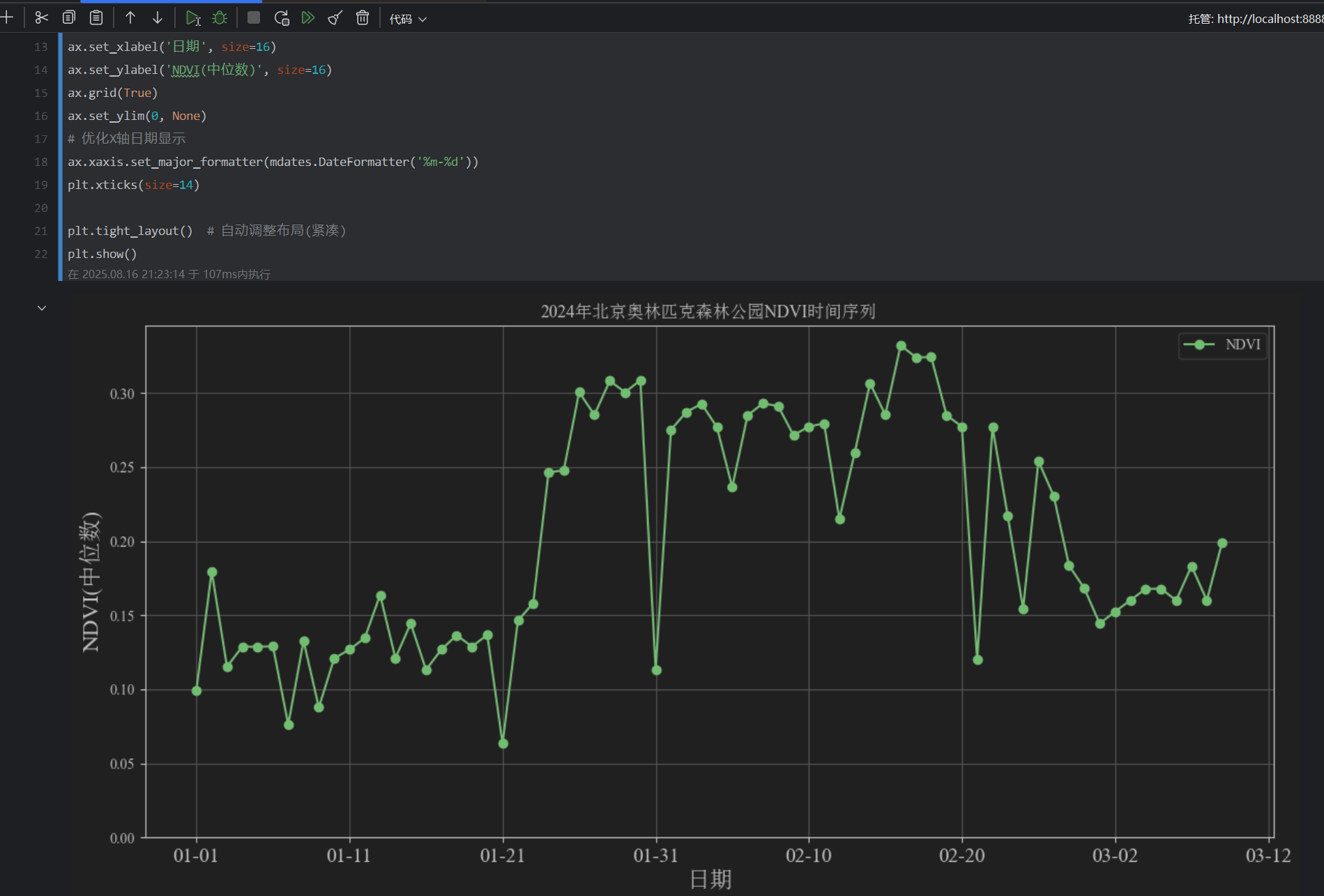
# 绘制NDVI折线图
plt.rcParams['font.family'] = ['Times New Roman', 'SimSun'] # 可显示中文(中文宋体-SimSun, 英文新罗马-Times New Roman)
plt.rcParams['axes.unicode_minus'] = False # 可显示负号fig, ax = plt.subplots(figsize=(12, 6))
ndvi_df.plot(ax=ax,style='-o',color='green',title='2024年北京奥林匹克森林公园NDVI时间序列'
)
# 优化XY轴信息
ax.set_xlabel('日期', size=16)
ax.set_ylabel('NDVI(中位数)', size=16)
ax.grid(True)
ax.set_ylim(0, None)
# 优化X轴日期显示
ax.xaxis.set_major_formatter(mdates.DateFormatter('%m-%d'))
plt.xticks(size=14)plt.tight_layout() # 自动调整布局(紧凑)
plt.show()
#%%
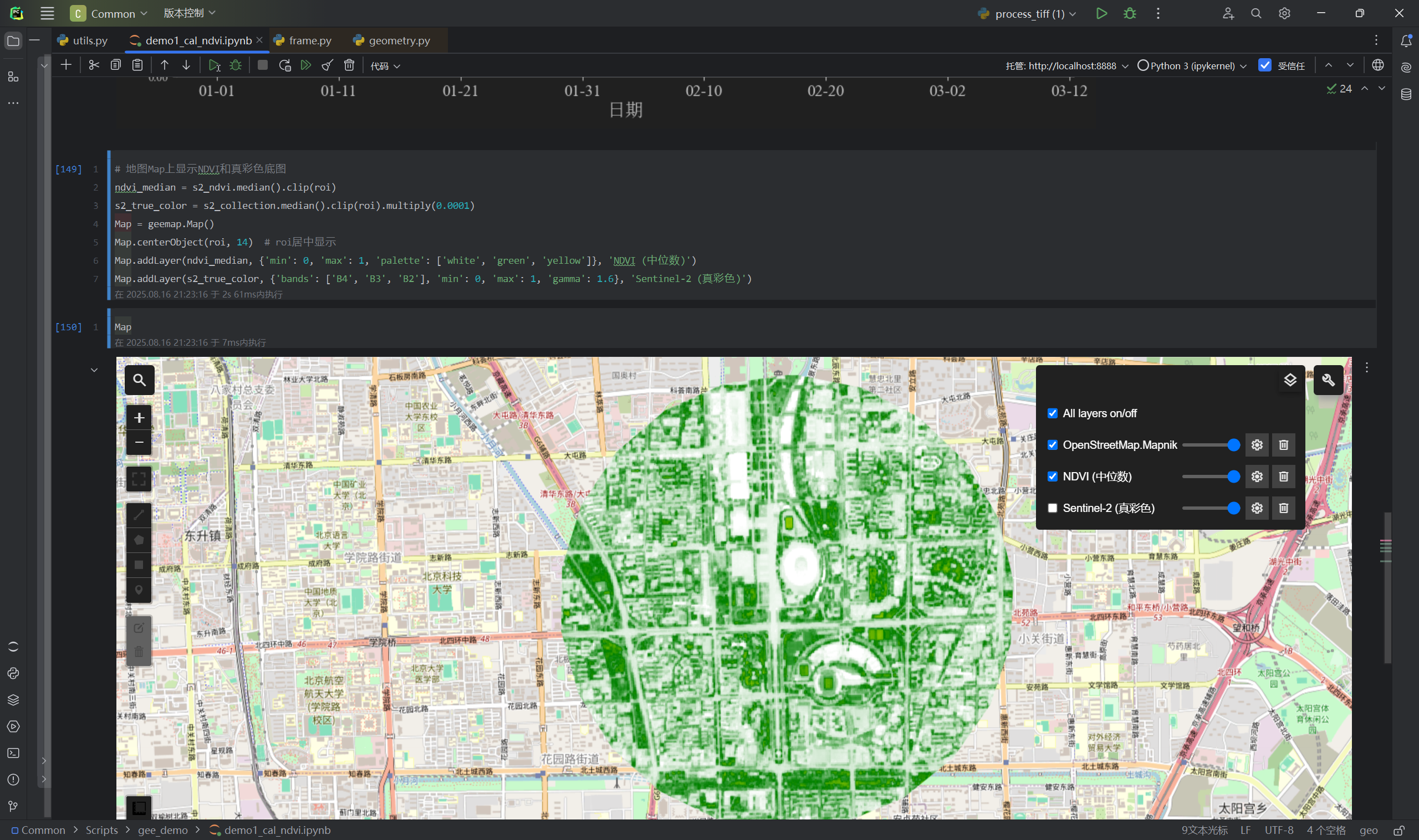
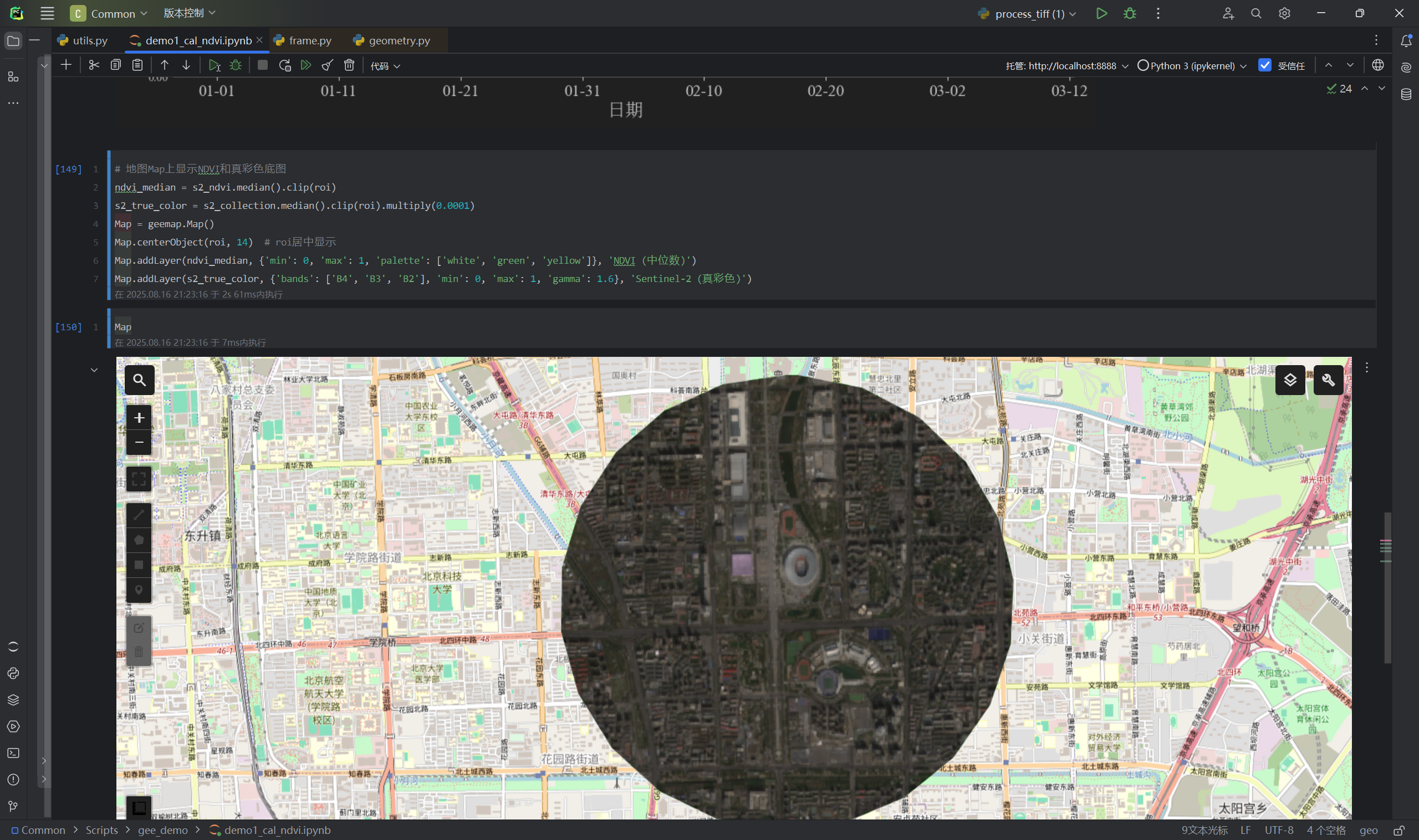
# 地图Map上显示NDVI和真彩色底图
ndvi_median = s2_ndvi.median().clip(roi)
s2_true_color = s2_collection.median().clip(roi).multiply(0.0001)
Map = geemap.Map()
Map.centerObject(roi, 14) # roi居中显示
Map.addLayer(ndvi_median, {'min': 0, 'max': 1, 'palette': ['white', 'green', 'yellow']}, 'NDVI (中位数)')
Map.addLayer(s2_true_color, {'bands': ['B4', 'B3', 'B2'], 'min': 0, 'max': 1, 'gamma': 1.6}, 'Sentinel-2 (真彩色)')
#%%
Map
结果展示: