stm32项目(29)——基于stm32的智能眼镜设计
目录
1.功能需求
2.原理图
3.功能演示视频
4.主要模块
4.1GPS模块
4.2语音播报模块
5.源文件
1.功能需求
基于stm32的智能眼镜设计
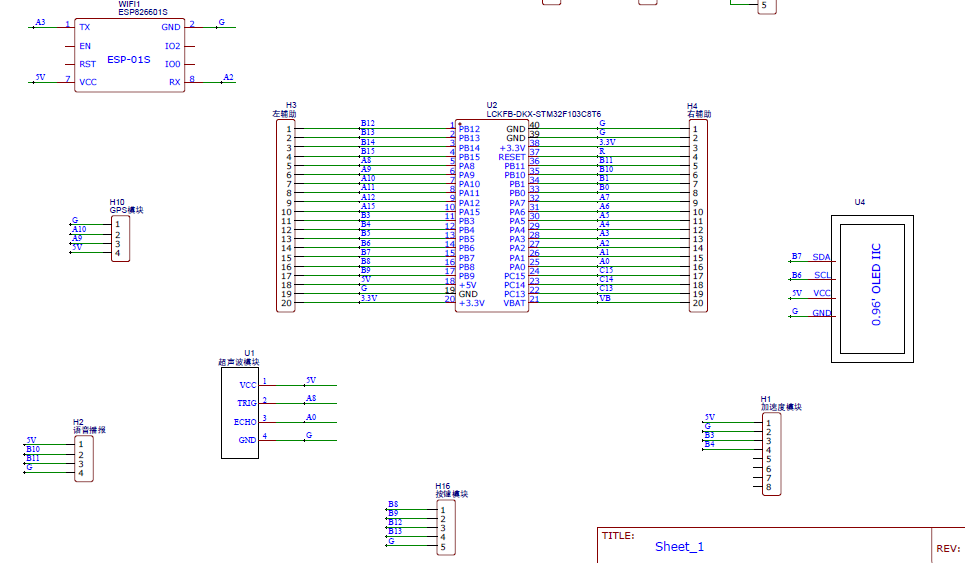
主控stm32f103c8t6,功能:可以检测障碍物距离、监测佩戴者是否跌倒,实时跟踪佩戴者的位置信息。
HC-SR04检测到距离障碍物过近,语音播报模块JQ8900-16P就会播报“距离过近,请注意”。
MPU6050跌倒检测模块检测到加速度过大,认为发生了跌倒,GPS模块NEO-6M记录当下的实时定位,通过ESP8266把位置信息远程发送到手机上。
按下机械按键,同样也会把实时定位发送到手机,提示按键报警。
0.96英寸12C接口的OLED 显示屏,显示当前的距离、加速度等信息。
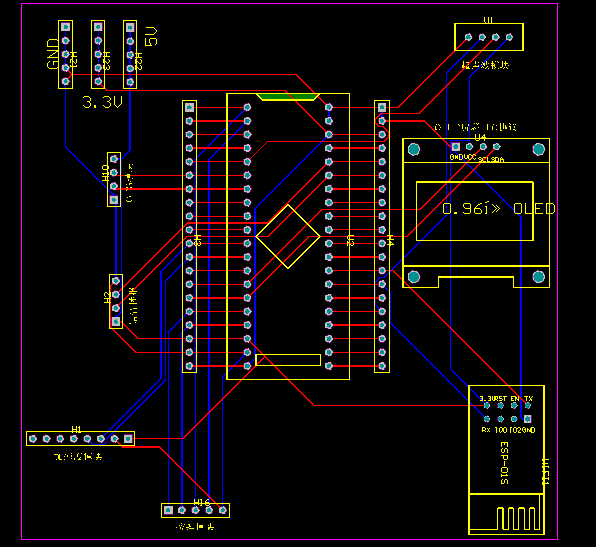
2.原理图
3.功能演示视频
基于STM32的智能眼镜设计
4.主要模块
4.1GPS模块
GPS模块NEO-6M

NEO-6M是u-blox公司推出的一款高性能GPS定位模块,广泛应用于车辆导航、无人机定位、轨迹记录等场景。其特点是小巧轻便、定位精度高(2.5米CEP),支持多卫星系统(GPS+GLONASS),并内置可充电备份电池维持星历数据。
1. 基本特性
-
定位精度:2.5米CEP(开阔环境下)
-
更新速率:默认1Hz(最高5Hz可配置)
-
卫星系统:支持GPS、GLONASS(需配置)
-
工作电压:3.3V~5V DC
-
通信协议:UART(默认9600bps,NMEA-0183格式)
-
特殊功能:
-
内置EEPROM存储配置参数
-
可充电备份电池(维持热启动时间)
-
外接有源天线接口(SMA端子)
-
2. 硬件接口(4引脚)
| 引脚 | 功能 | 连接说明 |
|---|---|---|
| VCC | 电源(3.3V~5V) | 接单片机电源(建议5V) |
| GND | 接地 | 与单片机共地 |
| TXD | 串口发送端 | 接单片机RXD(如PA10) |
| RXD | 串口接收端 | 接单片机TXD(如PA9) |
📌 注意:
模块自带陶瓷天线,但信号较弱,建议在室外使用。
若使用有源天线,需通过SMA接口连接并确保VCC供电足够(通常需3V~5V偏置)。
3. 数据协议(NMEA-0183)
模块通过UART持续输出NMEA语句,常用指令包括:
-
$GPGGA:时间、经纬度、海拔、卫星数
$GPGGA,123519,4807.038,N,01131.000,E,1,08,0.9,545.4,M,46.9,M,,*47
-
$GPRMC:推荐最小定位数据(速度、日期)
$GPRMC,123519,A,4807.038,N,01131.000,E,022.4,084.4,230394,003.1,W*6A
默认波特率为9600,且需要在室外才会有信号(或者阳台上)
4.2语音播报模块
JQ8900-16P
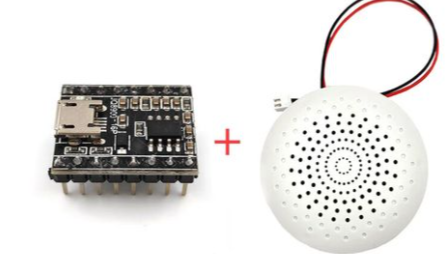
JQ8900-16P 是一款低成本、易集成的语音播放模块,支持MP3/WAV格式音频播放,广泛应用于智能设备语音提示、安防报警、自动播报等场景。其核心特点是采用两线串口通信(TX/RX),无需复杂协议即可控制播放,并内置16MB Flash存储(可扩展TF卡)。
1. 基本特性
-
音频格式:支持MP3(8~320kbps)和WAV(8/16bit,8~48kHz)
-
存储介质:内置16MB Flash(约40分钟音频),支持外接TF卡(最大32GB)
-
通信接口:两线串口(TX/RX,默认波特率9600bps)
-
控制方式:
-
直接发送指令码控制播放(如播放指定曲目、调节音量)
-
支持按键触发(可外接物理按键)
-
-
输出功率:3W(4Ω喇叭),支持立体声输出
-
供电电压:DC 3.7~5V(建议5V/500mA以上)
使用串口控制时,只需对其发送16进制指令即可。
例如,发送0xAA, 0x07, 0x02, 0x00, 0x01, 0xB4 代表播放音乐“00001.mp3”
5.源文件
压缩包内包含原理图、代码、注意事项讲解视频、机智云配网教程
基于STM32的智能眼镜设计资源-CSDN下载![]() https://download.csdn.net/download/guangali/91670572?spm=1001.2014.3001.5501
https://download.csdn.net/download/guangali/91670572?spm=1001.2014.3001.5501