RTC时钟倒计时数码管同步显示实现(STC8)
基于STC8的RTC时钟倒计时数码管同步显示实现
在工业控制、定时提醒、比赛计时等场景中,倒计时功能是非常实用的功能。基于STC8系列单片机,我们可以利用其内置的RTC(实时时钟)模块实现精准的倒计时功能,并通过数码管实时同步显示倒计时剩余时间。
系统整体设计
该系统主要由三个核心部分组成:
- 控制核心:STC8单片机(选用STC8H1K08型号),负责RTC时钟管理、倒计时逻辑运算和数码管驱动。
- 计时模块:STC8内置RTC模块,提供稳定的时间基准,确保倒计时精度。
- 显示模块:采用4位共阴极数码管,用于显示倒计时的"时:分"或"分:秒"。
系统工作流程:用户通过按键设置倒计时时间(如30分钟),单片机将RTC当前时间与设置的倒计时时间相加得到目标结束时间;之后系统不断比较当前RTC时间与目标结束时间,计算剩余时间并通过数码管实时显示;当剩余时间为0时,触发提示信号(如蜂鸣器报警)。
硬件电路设计
核心电路连接
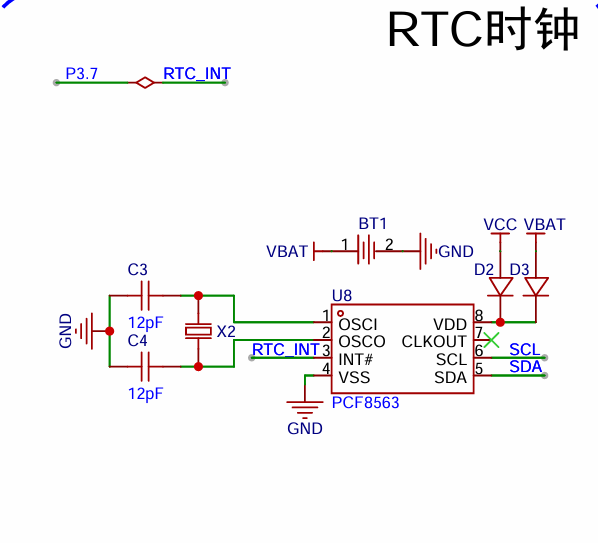
- RTC供电电路:
-
数码管驱动电路:
- 采用动态扫描方式驱动4位数码管
- 段选信号:通过74HC245驱动数码管的a-g段(连接P0口)
- 位选信号:通过PNP三极管(如8550)驱动数码管的位选端(连接P2.0-P2.3)
- 增加1kΩ限流电阻保护三极管和数码管
-
按键电路:
- 3个独立按键:设置键、加键、减键
- 连接至P3.2-P3.4,开启单片机内部上拉电阻
-
报警电路:
- 蜂鸣器通过NPN三极管(如8050)连接至P3.5
硬件设计注意事项
- 数码管公共端的三极管基极限流电阻需根据数码管工作电流调整(通常1kΩ)
- 按键两端可并联104瓷片电容进行硬件消抖
- RTC备用电源回路应尽量短,减少干扰
- 数码管段选线可增加100Ω限流电阻,保护IO口
软件程序实现
基于STC8的RTC时钟倒计时数码管同步显示实现
在工业控制、定时提醒、比赛计时等场景中,倒计时功能是非常实用的功能。基于STC8系列单片机,我们可以利用其内置的RTC(实时时钟)模块实现精准的倒计时功能,并通过数码管实时同步显示倒计时剩余时间。本文将详细介绍这一系统的设计与实现过程。
系统整体设计
该系统主要由三个核心部分组成:
- 控制核心:STC8单片机(选用STC8H1K08型号),负责RTC时钟管理、倒计时逻辑运算和数码管驱动。
- 计时模块:STC8内置RTC模块,提供稳定的时间基准,确保倒计时精度。
- 显示模块:采用4位共阴极数码管,用于显示倒计时的"时:分"或"分:秒"。
系统工作流程:用户通过按键设置倒计时时间(如30分钟),单片机将RTC当前时间与设置的倒计时时间相加得到目标结束时间;之后系统不断比较当前RTC时间与目标结束时间,计算剩余时间并通过数码管实时显示;当剩余时间为0时,触发提示信号(如蜂鸣器报警)。
硬件电路设计
核心电路连接
-
RTC供电电路:
- 通过VBAT引脚连接CR2032纽扣电池作为备用电源
- 串联10kΩ限流电阻,增加二极管防止主电源倒灌
-
数码管驱动电路:
- 采用动态扫描方式驱动4位数码管
- 段选信号:通过74HC245驱动数码管的a-g段(连接P0口)
- 位选信号:通过PNP三极管(如8550)驱动数码管的位选端(连接P2.0-P2.3)
- 增加1kΩ限流电阻保护三极管和数码管
-
按键电路:
- 3个独立按键:设置键、加键、减键
- 连接至P3.2-P3.4,开启单片机内部上拉电阻
-
报警电路:
- 蜂鸣器通过NPN三极管(如8050)连接至P3.5
硬件设计注意事项
- 数码管公共端的三极管基极限流电阻需根据数码管工作电流调整(通常1kΩ)
- 按键两端可并联104瓷片电容进行硬件消抖
- RTC备用电源回路应尽量短,减少干扰
- 数码管段选线可增加100Ω限流电阻,保护IO口
软件程序实现
1. 主函数
头文件与宏定义
// 库函数头文件
#include "GPIO.h"
#include "Delay.h"
#include "NVIC.h"
#include "UART.h"
#include "Switch.h"
#include "PCF8563.h"
#include "Exti.h"
#include "Nixie.h"void GPIO_config(void)
{// P30 P31 准双向口GPIO_InitTypeDef GPIO_InitStructure; // 结构定义GPIO_InitStructure.Pin = GPIO_Pin_0 | GPIO_Pin_1; // 指定要初始化的IO,GPIO_InitStructure.Mode = GPIO_PullUp; // 指定IO的输入或输出方式,GPIO_PullUp,GPIO_HighZ,GPIO_OUT_OD,GPIO_OUT_PPGPIO_Inilize(GPIO_P3, &GPIO_InitStructure); // 初始化
}void UART_config(void)
{// >>> 记得添加 NVIC.c, UART.c, UART_Isr.c <<<COMx_InitDefine COMx_InitStructure; // 结构定义COMx_InitStructure.UART_Mode = UART_8bit_BRTx; // 模式, UART_ShiftRight,UART_8bit_BRTx,UART_9bit,UART_9bit_BRTxCOMx_InitStructure.UART_BRT_Use = BRT_Timer1; // 选择波特率发生器, BRT_Timer1, BRT_Timer2 (注意: 串口2固定使用BRT_Timer2)COMx_InitStructure.UART_BaudRate = 115200ul; // 波特率, 一般 110 ~ 115200COMx_InitStructure.UART_RxEnable = ENABLE; // 接收允许, ENABLE或DISABLECOMx_InitStructure.BaudRateDouble = DISABLE; // 波特率加倍, ENABLE或DISABLEUART_Configuration(UART1, &COMx_InitStructure); // 初始化串口1 UART1,UART2,UART3,UART4NVIC_UART1_Init(ENABLE, Priority_1); // 中断使能, ENABLE/DISABLE; 优先级(低到高) Priority_0,Priority_1,Priority_2,Priority_3UART1_SW(UART1_SW_P30_P31); // 引脚选择, UART1_SW_P30_P31,UART1_SW_P36_P37,UART1_SW_P16_P17,UART1_SW_P43_P44
}char n = 20;
void ext_int3_call() { // 外部中断3回调函数// printf("========timer_call==============\n");// 清除定时器标志位PCF8563_clear_timer();n --;if (n <= 0) {n = 20;}
}void main()
{Clock_t temp;Alarm_t alarm;EA = 1; // 使能全局中断开关// ========记得=============EAXSFR(); /* 扩展寄存器访问使能 */GPIO_config(); // IO配置函数调用UART_config(); // UART配置函数调用// PCF8563初始化PCF8563_init();Nixie_init(); // 数码管//======================================时间日期temp.year = 2025; temp.month = 4; temp.day = 11;temp.weekday = 5; // 星期几temp.hour = 23; temp.minute = 59; temp.second = 56;PCF8563_set_clock(temp);//===================2.1 闹钟设置 寄存器地址 0x09alarm.day = -1, alarm.hour = 0, alarm.minute = 0, alarm.weekday = -1;PCF8563_set_alarm(alarm);//===================2.2 闹钟开启 寄存器地址 0x01PCF8563_enable_alarm(); // 启用PCF8563_disable_alarm(); // 禁用//======================================定时器PCF8563_set_timer(HZ64, 64); // 时间间隔 64 / 64 = 1sPCF8563_enable_timer(); // 启动定时器// PCF8563_disable_timer(); // 禁用定时器while (1) {Nixie_display(n / 10, 1); // 十位delay_ms(1); // 适当延时,非必须,只是不要让循环处理太快Nixie_display(n % 10, 2); // 个位delay_ms(1);Nixie_show(0xff, 0xff); // 全灭}
}
2. RTC模块初始化与操作
PCF8563.c文件
#include "PCF8563.h"static void GPIO_config(void)
{GPIO_InitTypeDef GPIO_InitStructure; // 结构定义// P32 P33 开漏模式GPIO_InitStructure.Pin = GPIO_Pin_2 | GPIO_Pin_3; // 指定要初始化的IO,GPIO_InitStructure.Mode = GPIO_OUT_OD; // 指定IO的输入或输出方式,GPIO_PullUp,GPIO_HighZ,GPIO_OUT_OD,GPIO_OUT_PPGPIO_Inilize(GPIO_P3, &GPIO_InitStructure); // 初始化// P37 准双向口GPIO_InitStructure.Pin = GPIO_Pin_7; // 指定要初始化的IO,GPIO_InitStructure.Mode = GPIO_PullUp; // 指定IO的输入或输出方式,GPIO_PullUp,GPIO_HighZ,GPIO_OUT_OD,GPIO_OUT_PPGPIO_Inilize(GPIO_P3, &GPIO_InitStructure);
}// I2C配置函数定义
/**************** I2C初始化函数 *****************/
static void I2C_config(void)
{I2C_InitTypeDef I2C_InitStructure;I2C_InitStructure.I2C_Mode = I2C_Mode_Master; // 主从选择 I2C_Mode_Master, I2C_Mode_SlaveI2C_InitStructure.I2C_Enable = ENABLE; // I2C功能使能, ENABLE, DISABLEI2C_InitStructure.I2C_MS_WDTA = DISABLE; // 主机使能自动发送, ENABLE, DISABLEI2C_InitStructure.I2C_Speed = 13; // 总线速度=Fosc/2/(Speed*2+4), 0~63// 400k, 24M => 13I2C_Init(&I2C_InitStructure);NVIC_I2C_Init(I2C_Mode_Master, DISABLE, Priority_0); // 主从模式, I2C_Mode_Master, I2C_Mode_Slave; 中断使能, ENABLE/DISABLE; 优先级(低到高) Priority_0,Priority_1,Priority_2,Priority_3I2C_SW(I2C_P33_P32); // I2C_P14_P15,I2C_P24_P25,I2C_P33_P32
}/******************** INT配置 ********************/
static void Exti_config(void)
{EXTI_InitTypeDef Exti_InitStructure; //结构定义Exti_InitStructure.EXTI_Mode = EXT_MODE_RiseFall;//中断模式, EXT_MODE_RiseFall,EXT_MODE_FallExt_Inilize(EXT_INT3,&Exti_InitStructure); //初始化NVIC_INT3_Init(ENABLE,Priority_0); //中断使能, ENABLE/DISABLE; 优先级(低到高) Priority_0,Priority_1,Priority_2,Priority_3
}// PCF8563初始化
void PCF8563_init() {EA = 1;EAXSFR(); /* 扩展寄存器访问使能 */GPIO_config();I2C_config();Exti_config();
}// 设置时间
void PCF8563_set_clock(Clock_t temp) {u8 p[7] = {0};// 秒的寄存器地址为: 0x02// 秒: 第0~3位记录个位,第4~6位记录十位p[0] = WRITE_BCD(temp.second);// 分: 第0~3位,保存个数,第4到6位,保存十位p[1] = WRITE_BCD(temp.minute);// 时:第0~3位,保存个数,第4到5位,保存十位p[2] = WRITE_BCD(temp.hour);// 日:第0~3位,保存个数,第4到5位,保存十位p[3] = WRITE_BCD(temp.day);// 周:第0~2位,保存个数p[4] = temp.weekday;// 月_世纪: 第0~3位记录个位,第4位记录十位,第7位为0,世纪数为20xx; 为1,世纪数为21xxp[5] = WRITE_BCD(temp.month);if(temp.year >= 2100) { // p[5] 的第7位为1p[5] |= (1 << 7);} else { // p[5] 的第7位为0p[5] &= ~(1 << 7);}// 年:第0~3位,保存个数,第4到7位,保存十位// 2025 => 25 => 2 和 5p[6] = WRITE_BCD(temp.year % 100);// 往rtc时钟芯片,写如数据I2C_WriteNbyte(PCF8563_DEV_ADDR, PCF8563_REG_SECOND, p, 7);
}// 获取时间
void PCF8563_get_clock(Clock_t *p) {u8 temp[7] = {0}; // 接收数据u8 flag;// 读取rtc时钟芯片,数据, 读操作也是用写地址,内部会把写地址,变成读地址I2C_ReadNbyte(PCF8563_DEV_ADDR, PCF8563_REG_SECOND, temp, 7);// 秒的寄存器地址为: 0x02// 秒: 第0~3位记录个位,第4~6位记录十位p->second = READ_BCD(temp[0]); // 秒// 分: 第0~3位,保存个数,第4到6位,保存十位p->minute = READ_BCD(temp[1]); // 分// 时:第0~3位,保存个数,第4到5位,保存十位p->hour = READ_BCD(temp[2]); // 时// 日:第0~3位,保存个数,第4到5位,保存十位p->day = READ_BCD(temp[3]); // 日// 周:第0~2位,保存个数p->weekday = temp[4]; // 周// 月_世纪: 第0~3位记录个位,第4位记录十位,第7位为0,世纪数为20xx,为1,世纪数为21xx// 取出月的第7位的值flag = (temp[5] & (1 << 7)) >> 7; // 取出月的第7位的值// 给第7位置零temp[5] &= ~(1 << 7); // 给第7位置零// 取出月的第4到6位的值p->month = READ_BCD(temp[5]); // 月// 年:第0~3位,保存个数,第4到7位,保存十位p->year = READ_BCD(temp[6]); // 年if (flag == 1) { // 世纪数为21xxp->year += 2100;}else {p->year += 2000;}
}//=============================闹钟
// 设置闹钟
void PCF8563_set_alarm(Alarm_t alarm) {u8 p[4];// 分: 第0~3位,记录个数, 第4~6位记录十位, 第7位:置0启动, 置1禁用// 默认第7位为0p[0] = alarm.minute != -1 ? WRITE_BCD(alarm.minute) : 0x80; // 分// 时: 第0~3位,记录个数, 第4~5位记录十位, 第7位:置0启动, 置1禁用p[1] = alarm.hour != -1 ? WRITE_BCD(alarm.hour) : 0x80; // 时// 日: 第0~3位,记录个数, 第4~5位记录十位, 第7位:置0启动, 置1禁用p[2] = alarm.day != -1 ? WRITE_BCD(alarm.day) : 0x80; // 周: 第0~2位,记录个数, 第7位:置0启动, 置1禁用p[3] = alarm.weekday != -1 ? WRITE_BCD(alarm.weekday): 0x80; I2C_WriteNbyte(PCF8563_DEV_ADDR, 0x09, p, 4);
}// 启用闹钟
void PCF8563_enable_alarm() {u8 cfg;//a) 读原来的配置(不要乱改配置,只改自己的位,其它维持不变)I2C_ReadNbyte(PCF8563_DEV_ADDR, 0x01, &cfg, 1);//b) 在原来配置的基础上,清除标志位 第3位:置0清除标志位cfg &= ~(1 << 3);//c) 在原来配置基础上,启动闹钟,第1位:置1启动 cfg |= (1 << 1);//d) 重新写入配置I2C_WriteNbyte(PCF8563_DEV_ADDR, 0x01, &cfg, 1);}// 禁用闹钟Alarm
void PCF8563_disable_alarm() {u8 cfg;//a) 读原来的配置(不要乱改配置,只改自己的位,其它维持不变)I2C_ReadNbyte(PCF8563_DEV_ADDR, 0x01, &cfg, 1);//b) 在原来配置的基础上,清除标志位 第3位:置0清除标志位cfg &= ~(1 << 3);//c) 在原来配置基础上,禁用闹钟,第1位:置0禁用cfg &= ~(1 << 1);//d) 重新写入配置I2C_WriteNbyte(PCF8563_DEV_ADDR, 0x01, &cfg, 1);}// 清理闹钟标记
void PCF8563_alarm_clear_flag() {u8 cfg;// ============================= 清除标志位,让闹钟能重复触发//a) 读原来的配置(不要乱改配置,只改自己的位,其它维持不变)I2C_ReadNbyte(PCF8563_DEV_ADDR, 0x01, &cfg, 1);//b) 在原来配置的基础上,清除标志位 第3位:置0清除标志位cfg &= ~(1 << 3);//d) 重新写入配置I2C_WriteNbyte(PCF8563_DEV_ADDR, 0x01, &cfg, 1);
}// 启动定时器
void PCF8563_enable_timer() {u8 cfg;//============2 定时器开启 寄存器地址 0x01//a) 读原来的配置(不要乱改配置,只改自己的位,其它维持不变)I2C_ReadNbyte(PCF8563_DEV_ADDR, 0x01, &cfg, 1);//b) 在原来配置的基础上,清除标志位,第2位:置0清除标志位cfg &= ~(1 << 2);//c) 在原来配置基础上,启动定时器,第0位,置1启用 cfg |= (1 << 0); //d) 重新写入配置I2C_WriteNbyte(PCF8563_DEV_ADDR, 0x01, &cfg, 1);}// 禁用定时器
void PCF8563_disable_timer() {u8 cfg;//============2 定时器开启 寄存器地址 0x01//a) 读原来的配置(不要乱改配置,只改自己的位,其它维持不变)I2C_ReadNbyte(PCF8563_DEV_ADDR, 0x01, &cfg, 1);//b) 在原来配置的基础上,清除标志位,第2位:置0清除标志位cfg &= ~(1 << 2);//c) 在原来配置基础上,启动定时器,第0位,置0禁用 cfg &= ~(1 << 0); //d) 重新写入配置I2C_WriteNbyte(PCF8563_DEV_ADDR, 0x01, &cfg, 1);
}// 清除定时器标志位
void PCF8563_clear_timer() {u8 cfg;// ============================= 清除标志位,让定时器能重复触发//a) 读原来的配置(不要乱改配置,只改自己的位,其它维持不变)I2C_ReadNbyte(PCF8563_DEV_ADDR, 0x01, &cfg, 1);//b) 在原来配置的基础上,清除标志位 第2位:置0清除标志位cfg &= ~(1 << 2);//d) 重新写入配置I2C_WriteNbyte(PCF8563_DEV_ADDR, 0x01, &cfg, 1);
}// 设置定时器,参数1:时钟频率 参数2:倒计时计算值,时间为:参数2/参数1
void PCF8563_set_timer(TimerFreq freq, u8 countdown) {u8 p[2];//============1 定时器设置 寄存器地址 0x0e//a) 时钟频率 国产芯片不建议用1hz// 0x00: 4.096 khz 0x01: 64 hz 0x02: 1hz 0x03: 1/60 hz// 第七位为1,定时器启用p[0] = freq + 0x80; // 0x80: 定时器启用;//b) 计数值(0~255) ===》时间为: 计数值/时钟频率 p[1] = countdown; // 计数值/时钟频率 = 64/64 = 1s 时间间隔I2C_WriteNbyte(PCF8563_DEV_ADDR, 0x0e, p, 2);
}
3. 数码管显示驱动
Nixie.c文件
#include "Nixie.h"#define SCK_ACTION() { NIX_SCK = 0;NOP2(); NIX_SCK = 1; NOP2();}static void GPIO_cfg() {// 创建结构体变量// 类型 变量GPIO_InitTypeDef info;// P43 P42info.Mode = GPIO_PullUp; // 准双向口info.Pin = PIN_SCK | PIN_RCK; // 引脚GPIO_Inilize(PORT, &info);// P44 推挽输出info.Mode = GPIO_OUT_PP; info.Pin = PIN_DI; // 引脚GPIO_Inilize(PORT, &info);
}void Nixie_init() {GPIO_cfg();
}void Nixie_out(u8 dat) {char i; // char 类型,有-操作// 内容for (i = 7; i >= 0; i--) {NIX_DI = ( dat & (1 << i) ) >> i;// 移位 0 -> 1SCK_ACTION();}
}// num: 控制显示的什么内容
// idx: 控制显示哪几个显示
void Nixie_show(u8 num, u8 idx) {Nixie_out(num); // 内容Nixie_out(idx); // 位置// 锁存NIX_RCK = 1;NOP2();NIX_RCK = 0;NOP2();}// 索引对应表格参见:
// https://www.yuque.com/icheima/stc8h/kmz2mllvxs1uvdfy#lLhhp
u8 code LED_TABLE[] =
{// 0 1 2 -> 9 (索引012...9)0xC0,0xF9,0xA4,0xB0,0x99,0x92,0x82,0xF8,0x80,0x90,// 0. 1. 2. -> 9. (索引10,11,12....19)0x40,0x79,0x24,0x30,0x19,0x12,0x02,0x78,0x00,0x10,// . - (索引20,21)0x7F, 0xBF,// AbCdEFHJLPqU (索引22,23,24....33)0x88,0x83,0xC6,0xA1,0x86,0x8E,0x89,0xF1,0xC7,0x8C,0x98,0xC1
};// i 对应的内容在数组的位置(索引),配合自定义码表
// n 显示在屏幕上的位置(1 -> 8)
void Nixie_display(u8 i, u8 n){// 除了0~9,刚好和下标一致,其它的内容,需要查表Nixie_show(LED_TABLE[i], 1 << (n - 1));
}
4. 中断函数的逻辑实现
Exti_Isr.c库函数,芯片官方提供的
#include "Exti.h"//========================================================================
// 本地变量声明
//========================================================================u8 WakeUpSource;
//========================================================================
// 函数: INT0_ISR_Handler
// 描述: INT0中断函数.
// 参数: none.
// 返回: none.
// 版本: V1.0, 2020-09-23
//========================================================================
void INT0_ISR_Handler (void) interrupt INT0_VECTOR //进中断时已经清除标志
{// TODO: 在此处添加用户代码
// P00 = ~P00;WakeUpSource = 1;
}//========================================================================
// 函数: INT1_ISR_Handler
// 描述: INT1中断函数.
// 参数: none.
// 返回: none.
// 版本: V1.0, 2020-09-23
//========================================================================
void INT1_ISR_Handler (void) interrupt INT1_VECTOR //进中断时已经清除标志
{// TODO: 在此处添加用户代码
// P01 = ~P01;WakeUpSource = 2;
}//========================================================================
// 函数: INT2_ISR_Handler
// 描述: INT2中断函数.
// 参数: none.
// 返回: none.
// 版本: V1.0, 2020-09-23
//========================================================================
void INT2_ISR_Handler (void) interrupt INT2_VECTOR //进中断时已经清除标志
{// TODO: 在此处添加用户代码
// P02 = ~P02;WakeUpSource = 3;
}void ext_int3_call(); // 声明
//========================================================================
// 函数: INT3_ISR_Handler
// 描述: INT3中断函数.
// 参数: none.
// 返回: none.
// 版本: V1.0, 2020-09-23
//========================================================================
void INT3_ISR_Handler (void) interrupt INT3_VECTOR //进中断时已经清除标志
{// TODO: 在此处添加用户代码ext_int3_call(); // 调用
// P03 = ~P03;WakeUpSource = 4;
}//========================================================================
// 函数: INT4_ISR_Handler
// 描述: INT4中断函数.
// 参数: none.
// 返回: none.
// 版本: V1.0, 2020-09-23
//========================================================================
void INT4_ISR_Handler (void) interrupt INT4_VECTOR //进中断时已经清除标志
{// TODO: 在此处添加用户代码
// P04 = ~P04;WakeUpSource = 5;
}5. PCF8563自定义的时间封装的库函数
PCF8563.h
#ifndef __PCF8563_H__
#define __PCF8563_H__#include "GPIO.h"
#include "Switch.h"
#include "I2C.h"
#include "NVIC.h"
#include "Exti.h"// 设备地址
#define PCF8563_DEV_ADDR 0xa2
// 存储地址(寄存器地址): 时间(秒)存储地址
#define PCF8563_REG_SECOND 0x02#define WRITE_BCD(val) (val % 10) + ((val / 10) << 4)
#define READ_BCD(val) (val & 0x0f) + ((val & 0xf0) >> 4) * 10typedef struct {u16 year; u8 month;u8 day;u8 weekday;u8 hour;u8 minute;u8 second;
} Clock_t;// PCF8563初始化
void PCF8563_init();// 设置时间
void PCF8563_set_clock(Clock_t temp);// 获取时间
void PCF8563_get_clock(Clock_t *temp);//=============================闹钟
typedef struct {// 设置分\时\天\周,如果为-1,禁用此项char minute ;char hour ;char day ;char weekday;
} Alarm_t;// 设置闹钟
void PCF8563_set_alarm(Alarm_t alarm);
// 启用闹钟
void PCF8563_enable_alarm();
// 禁用闹钟Alarm
void PCF8563_disable_alarm();
// 清理闹钟标记
void PCF8563_alarm_clear_flag();//=============================定时器
typedef enum { HZ4096 = 0, HZ64 = 1, HZ1 = 2, HZ1_60 = 3} TimerFreq;// 启动定时器
void PCF8563_enable_timer();
// 禁用定时器
void PCF8563_disable_timer();
// 清除定时器标志位
void PCF8563_clear_timer();
// 设置定时器,参数1:时钟频率 参数2:倒计时计算值,时间为:参数2/参数1
void PCF8563_set_timer(TimerFreq freq, u8 countdown);#endif
系统调试与优化
-
时间精度校准:
- 若发现倒计时有误差,可通过RTC校准寄存器进行微调
- 定期与标准时间对比,记录误差并进行软件补偿
-
显示效果优化:
- 调整动态扫描的延时时间(通常1-5ms),平衡显示亮度和稳定性
- 增加数码管亮度调节功能,适应不同环境光线
-
功能扩展:
- 增加多个倒计时模式(时:分:秒、分:秒、秒)
- 加入暂停/继续功能
- 增加倒计时完成后的灯光提示
应用场景
该系统可应用于多种场景:
- 厨房定时提醒(如煲汤、烘焙计时)
- 比赛计时(如演讲比赛、答题竞赛)
- 工业设备定时控制(如定时停机提醒)
- 学习工作计时(如番茄工作法)
通过STC8单片机的RTC模块与数码管的结合,我们实现了一个精准、稳定且成本低廉的倒计时系统。该方案充分利用了STC8内置RTC的优势,简化了硬件设计,同时通过动态扫描方式降低了数码管的功耗,适合各类电池供电的便携式设备。