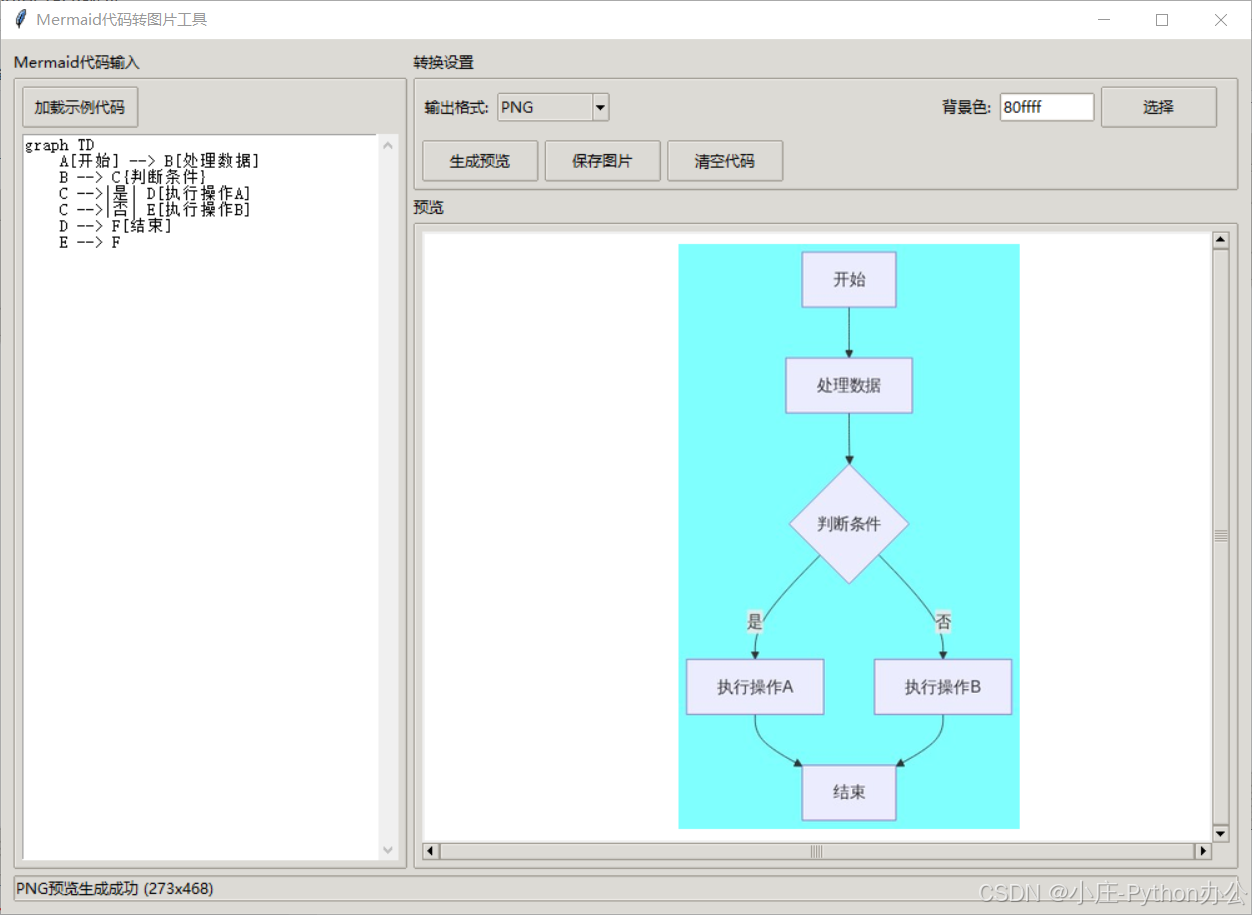
【Python办公】Mermaid代码转图片工具 - Tkinter GUI版本
目录
- 专栏导读
-
- 项目简介
- 功能特性
-
- 🎨 直观的图形界面
- 📝 代码编辑功能
- 🖼️ 图片生成与预览
- 💾 文件操作
- ⚡ 性能优化
- 技术架构
-
- 核心技术栈
- 架构设计
- 安装与使用
-
- 环境要求
- 依赖安装
- 运行程序
- 使用步骤
- 代码示例
-
- 基本流程图
- 时序图
- 甘特图
- 核心代码解析
-
- 1. 主类结构
- 2. API调用封装
- 3. 异步处理
- 4. 图像预览
- 项目亮点
-
- 🚀 技术亮点
- 🎯 用户体验
- 🔧 扩展性
- 常见问题
-
- Q: 生成图片失败怎么办?
- Q: 支持哪些Mermaid图表类型?
- Q: 可以离线使用吗?
- Q: 如何自定义界面样式?
- 版本历史
- 致谢
- 完整代码
专栏导读
🌸 欢迎来到Python办公自动化专栏—Python处理办公问题,解放您的双手
🏳️🌈 博客主页:请点击——> 一晌小贪欢的博客主页求关注
👍 该系列文章专栏:请点击——>Python办公自动化专栏求订阅
🕷 此外还有爬虫专栏:请点击——>Python爬虫基础专栏求订阅
📕 此外还有python基础