【排序算法】⑥快速排序:Hoare、挖坑法、前后指针法
系列文章目录
第一篇:【排序算法】①直接插入排序-CSDN博客
第二篇:【排序算法】②希尔排序-CSDN博客
第三篇:【排序算法】③直接选择排序-CSDN博客
第四篇:【排序算法】④堆排序-CSDN博客
第五篇:【排序算法】⑤冒泡排序-CSDN博客
第六篇:【排序算法】⑥快速排序:Hoare、挖坑法、前后指针法-CSDN博客
第七篇:【排序算法】⑦归并排序-CSDN博客

目录
系列文章目录
前言
一、快排思想
二、以Hoare算法为核心实现快排
1.三数取中函数
2.经典Hoare快排
细节:为什么左做key,内循环一定要右边先找?
完整代码框架
优化快排
三、算法拓展
挖坑法
前后指针法
四、分析快速排序
总结
前言
快速排序是当前最常用到的排序算法,快速排序整体的综合性能和使用场景都是较优的,所以才敢叫快速排序。
本文以经典Hoare快排算法为主,并结合其他函数先为读者展现一个完整的快排代码框架,之后再介绍挖坑法与前后指针法。
一、快排思想
快速排序是Hoare于上世纪60年代提出的一种类似二叉树结构的交换排序方法,其基本思想为:
任取待排序元素数组中的某元素作为基准值,按照该基准值将待排序集合分割成两子序列,使左子序列中所有元素均小于基准值,右子序列中所有元素均大于基准值,然后最左右子序列重复该过程,直到所有元素都排列在相应位置上为止。
该算法的实现有递归与非递归两种方式,非递归方式需要用到自定义数据结构“栈”,因此本文用较为简单的递归方式为例介绍。
// 假设按照升序对a数组中[left, right]区间中的元素进行排序
void QuickSort(int* a, int left, int right)
{if (left >= right)return;if (!a)return;int div = PartSort1(a, left, right);// 递归排[left, div)QuickSort(a, left, div-1);// 递归排[div+1, right)QuickSort(a, div + 1, right);
}解释:
①其中形参*a是需要排序的数组,left与right分别指向该数组的第一个元素与最后一个元素的数组下标;
②其中调用的PartSort1函数为具体实现函数——即做到“按照该基准值将待排序集合分割成两子序列,使左子序列中所有元素均小于基准值,右子序列中所有元素均大于基准值”。
③不同的算法有不同的实现过程,咱们以PartSort1代指经典的Hoare快排算法;PartSort2为挖坑法;PartSort3为前后指针法。它们都会返回基准值的数组下标。
④利用递归不断分区,直至单个元素返回。将每一个待排数据实现“左序列中所有元素均小于基准值,右子序列中所有元素均大于基准值”,此时整个数组有序。如:1,2,3,4,5,6,7。
二、以Hoare算法为核心实现快排
1.三数取中函数
首先我们需要选定一个基准值作为比较对象,使得小于该基准值的数据都移动到它左边,大于它的移动到右边。因此该基准值最好选择该数组中的非最大值或最小值,若选择最大值或最小值为基准值,则算法效率大幅下降。
三数取中函数的目的就是确保:基准值非最大值或最小值。
GetMid:三数取中
//三数取中
int GetMid(int* a, int left, int right)
{int mid = (right - left) / 2;if (a[mid] < a[right]){if (a[mid] > a[left])return mid;else return a[left] < a[right] ? left : right;}else{if (a[right] > a[left])return right;else return a[left] > a[mid] ? mid : left;}
}解释:
①left与right、mid都是存储的数组下标;
②我们从数组首元素、末元素和中间元素三个数据中选择一个中间值,确保基准值非最大值或最小值,并返回其数组下标。
③第一个if 条件中的else:如果a[mid]小于a[right],但a[mid]又小于等于a[left](未满足if),那么返回a[left]与a[right]中的较小值下标即可。第二个if 条件中的else同理;
现在,再次明确目的:如何才能做到“使左子序列中所有元素均小于基准值,右子序列中所有元素均大于基准值”?
2.经典Hoare快排
算法介绍:
①通过三数取中函数得到基准值,将其与首元素交换,再定义key变量存储基准值下标;
②从数组右边开始寻找大于a[key](基准值)的元素,若存在则right最后指向的就是它;从数组左边开始寻找小于a[key](基准值)的元素,若存在则left最后指向的就是它;
③确保left与right没有跑过的情况下,将上述找到的值交换。然后重复②。
④结束时,也就是left与right相遇时,将相遇所在的位置的数据与基准值交换,并返回交换后基准值下标;
代码参考:
// 快速排序hoare版本
int PartSort1(int* a, int left, int right)
{//左第一个做keyint mid = GetMid(a, left, right);swap(&a[mid], &a[left]);int key = left;while (left < right){// 左做key,右先走// 找大于a[key]的值while (left < right && a[right] >= a[key])right--; // 找小于a[key]的值while (left < right && a[left] <= a[key])left++; if (left < right){swap(&a[left], &a[right]);}}swap(&a[key], &a[left]);return left;
}void swap(int* a, int* b)
{int temp = *a;*a = *b;*b = temp;
}(本文以a[left]与基准值交换,实际上可以是left也可以是right,只不过内循环执行顺序不同)
举个例子解释说明:可结合下方图解与上述代码查看
假设有数组int a[ ]={7,5,2,3,6,4,9,1,0},执行一次上述代码流程为:
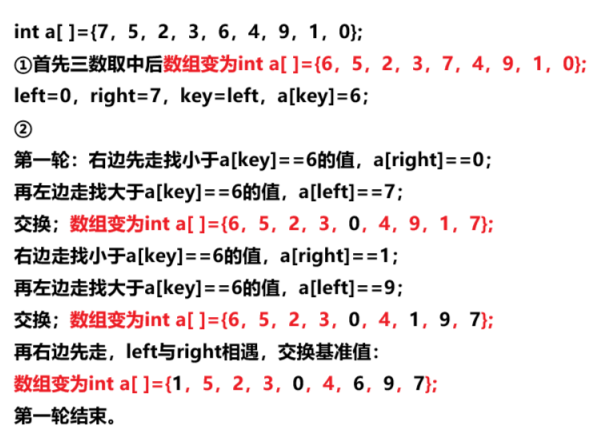
图解:
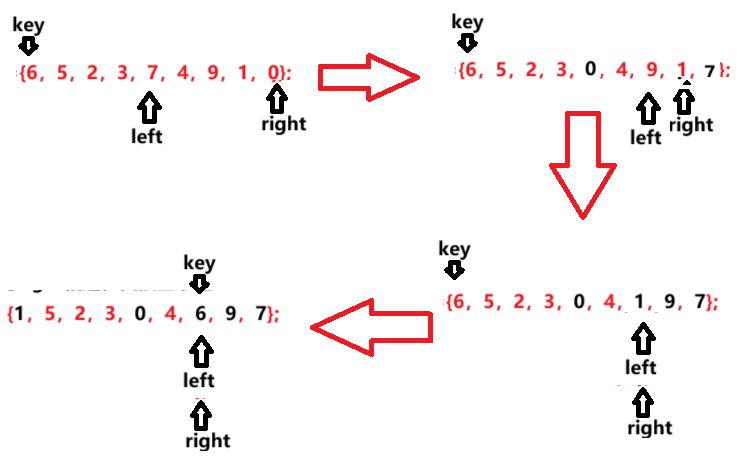
当外循环结束,此时数组满足基准值左边都小于基准值,基准值右边都大于基准值。
返回基准值的下标给div,接着执行QuickSort余下代码:
int div = PartSort1(a, left, right);QuickSort(a, left, div-1);QuickSort(a, div + 1, right);// 快速排序递归实现
void QuickSort(int* a, int left, int right)
{if (left >= right)return;if (!a)return;int div = PartSort1(a, left, right);QuickSort(a, left, div-1);QuickSort(a, div + 1, right);
}将基准值左右两边的数据集当作新的数组(传入的是数组下标,实质还是在原数组上修改),以递归思想再次传入QuickSort函数。
何时函数执行结束?
这样套娃一直递归下去,直到传入的新数组只有一个元素(一个元素肯定有序),或者传入数组下标不合理,如left>right等,会通过 if 而返回。
if (left >= right)return;细节:为什么左做key,内循环一定要右边先找?
这是为了预防情况:
①如果在某次交换完成后,right一直左移,直到与left相遇,那么此时相遇位置的值一定是小于基准值的!——因为刚发生了交换,小于基准值的被交换到了left的位置。所以再执行外循环外的swap(&a[key], &a[left]);时可以防止将大于基准值的数交换到数组前边去。
如果是左边先找,就会出现将大于基准值的数交换到数组前边去。
②如果压根就没有发生交换,一开始就right一直向左直至遇到left,此时“swap(&a[key], &a[left])”交换的是同一个位置的值(没有影响);但如果右边先走就会出现将大于基准值的数交换到数组前边去。
完整代码框架
// 快速排序递归实现
void QuickSort(int* a, int left, int right)
{if (left >= right)return;if (!a)return;if (right - left <= 10){InsertSort(a + left, right - left + 1);return;}int div = PartSort1(a, left, right);QuickSort(a, left, div-1);QuickSort(a, div + 1, right);
}// 快速排序hoare版本
int PartSort1(int* a, int left, int right)
{//左第一个做keyint mid = GetMid(a, left, right);swap(&a[mid], &a[left]);int key = left;while (left < right){// 右边指针while (left < right && a[right] >= a[key])right--; // 左边指针while (left < right && a[left] <= a[key])left++; if (left < right){swap(&a[left], &a[right]);}}swap(&a[key], &a[left]);return left;
}//三数取中
int GetMid(int* a, int left, int right)
{int mid = (right - left) / 2;if (a[mid] < a[right]){if (a[mid] > a[left])return mid;else return a[left] < a[right] ? left : right;}else{if (a[right] > a[left])return right;else return a[left] > a[mid] ? mid : left;}
}//直接插入排序:用于优化hoare版本
void InsertSort(int* a, int n)
{if (!a){perror("arr is NULL");return;}//【0,end】为有序,temp即a[end+1]为插入数据;//在一遍for循环结束后,【0,end+1】变有序;//内循环while的作用是为a[end+1]寻找在【0,end+1】中合适的位置for (int i = 0; i < n - 1; ++i){int end = i;int temp = a[end + 1];while (end >= 0){if (a[end] > temp){a[end + 1] = a[end];end--;}else{break;}}//走到这里end已经变成-1a[end + 1] = temp;}
}void swap(int* a, int* b)
{int temp = *a;*a = *b;*b = temp;
}优化快排
读者可能已经注意到上述代码与之前分析有不同之处:加入了InsertSort直接插入排序。
为什么?
在上述的例子中我们用了几个数据为例,分析了快排实际执行流程,但现实使用中很少出现这种几个数排序的的情况。
实际上几个数快排造成的函数调用等的时间损耗,比直接InsertSort插入排的时间损耗还多。
具体原因有:
1.减少递归开销:
快速排序是递归算法,每次递归调用都会产生函数调用栈的开销
对于小数组(如10个元素),递归调用产生的开销可能超过排序本身的成本
插入排序是原地排序,没有递归开销
2.实验表明,当n<15时,插入排序通常比快速排序更快。
所以当排序数据量小于等于10时,采用直接插入排序。这点在代码中体现为:
if (right - left <= 10){InsertSort(a + left, right - left + 1);return;}到这里一个完整的快排算法框架就算是搭好了,接下来介绍挖坑法与前后指针法。
三、算法拓展
挖坑法与前后指针法都可以用作快排中的核心算法,它们与Hoare算法作用一样,读者可随自己喜好随意用哪种。
之所以先介绍Hoare算法,完全是为了先搭好一个快排的框架。
至于框架内用哪种算法解决“使左子序列中所有元素均小于基准值,右子序列中所有元素均大于基准值”,它们三个都可以完成。
挖坑法
挖坑法顾名思义,就是拿符合条件的值去填坑。
算法介绍:
①通过三数取中函数得到基准值,将它与首元素交换,再定义key变量存储基准值,定义变量hole做坑,初始值为hole=left;
②从后往前,先找小于key(基准值)的元素。找到后,将这个值填入坑中,即a[hole]=a[right],然后这个right当作新坑,接着执行③
③从前往后,找大于key的元素。找到后,将这个值填入坑中,即a[hole]=a[left],然后这个leftt作当作新坑;
④重复②和③,直到left与right相遇,最后把key值填入坑中。
代码参考:
// 快速排序挖坑法
int PartSort2(int* a, int left, int right)
{int mid = GetMid(a, left, right);swap(&a[left], &a[mid]);int key = a[left];int hole = left;while (left < right){while (left < right && a[right] >= key){right--;}a[hole] = a[right];hole = right;while (left < right && a[left] <= key){left++;}a[hole] = a[left];hole = left;}a[hole] = key;return hole;
}举个例子解释说明:可结合下方图解与上述代码查看
假设有数组int a[ ]={7,5,2,3,6,4,9,1,0},执行一次上述代码流程为:
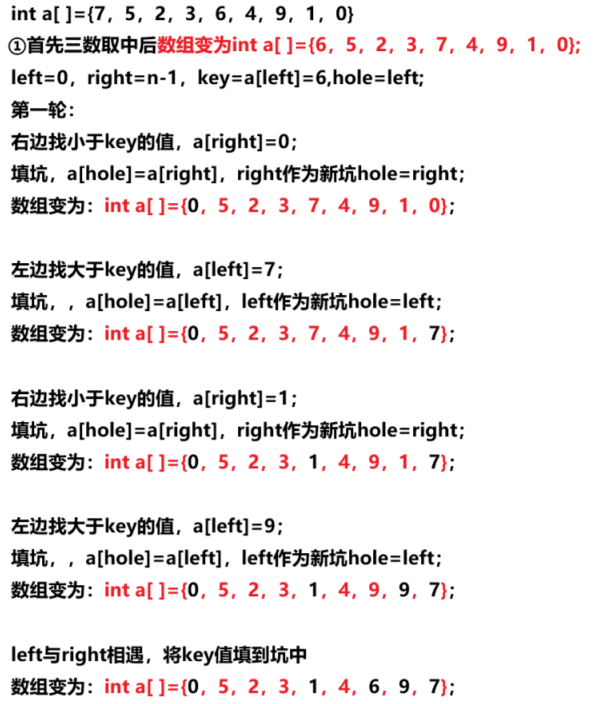
图解:
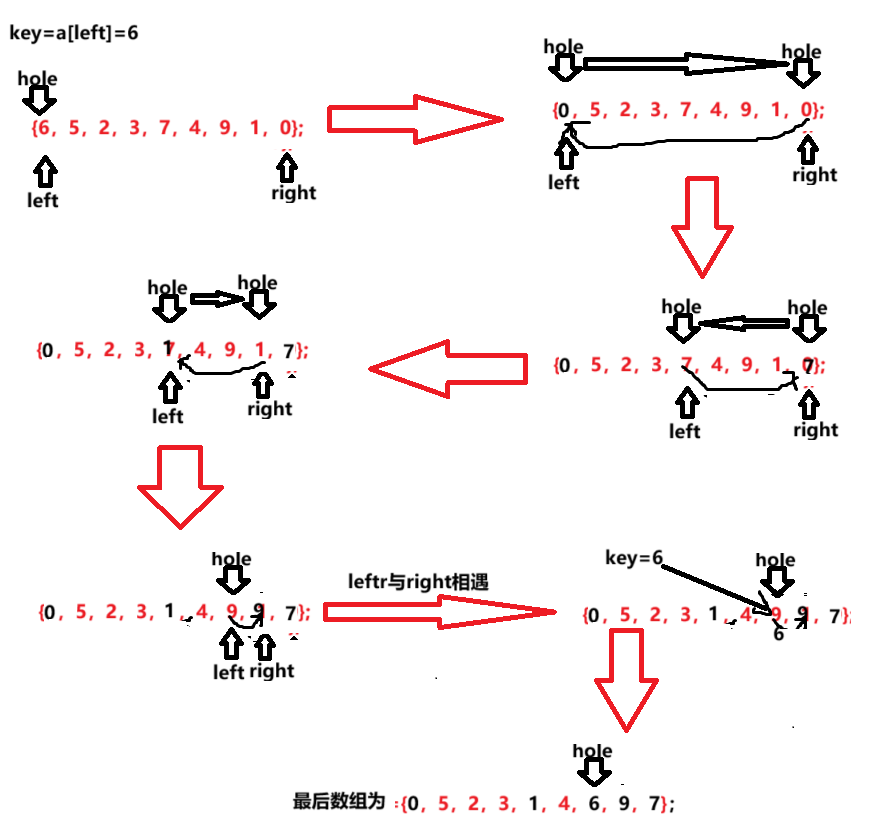
一轮结束后,基准值的下标被放回,实现基准值(6)左边都小于它,右边都大于它。
前后指针法
算法介绍:
①通过三数取中函数得到基准值,将它与首元素交换。再定义key变量存储基准值,定义变量pre=left,定义变量cur=pre+1;
②pre变量存储小于等于基准值的最后一个元素的数组下标;
③cur遍历数组,当cur遇到小于基准值key的值时,pre++,并交换pre下标与cur下标所对应的值;
④cur++,重复③
⑤遍历结束后,将基准值与最后pre到达的位置对应的值进行交换。返回基准值下标。
代码实现:
// 正确的快速排序前后指针法
int PartSort3(int* a, int left, int right)
{// 1. 三数取中选择基准int mid = GetMid(a, left, right);swap(&a[left], &a[mid]);int key = a[left];// 2. 初始化指针int pre = left; // 指向小于基准的最后一个元素int cur = left + 1; // 遍历指针// 3. 遍历分区while (cur <= right){// 当前元素小于基准时,与pre后元素交换//if (a[cur] < key)//{// pre++;// swap(&a[pre], &a[cur]);//}//cur++;//优化后if (a[cur] < key&&++pre!=cur){swap(&a[cur], &a[pre]);}cur++;}// 4. 将基准放到正确位置swap(&a[left], &a[pre]);return pre;
}依旧举个例子解释说明:可结合下方图解与上述代码查看
假设有数组int a[ ]={7,5,2,3,6,4,9,1,0},执行一次上述代码流程为:
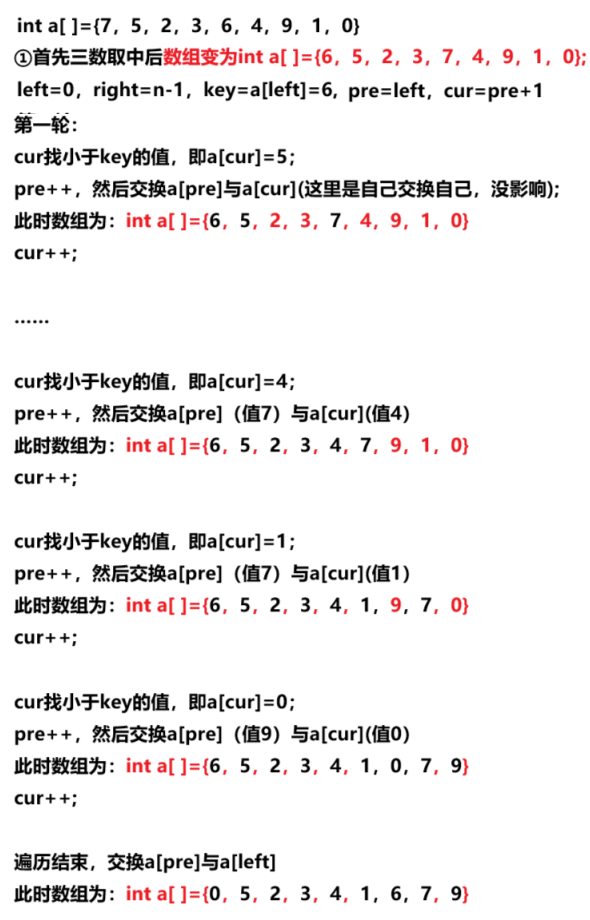
图解:
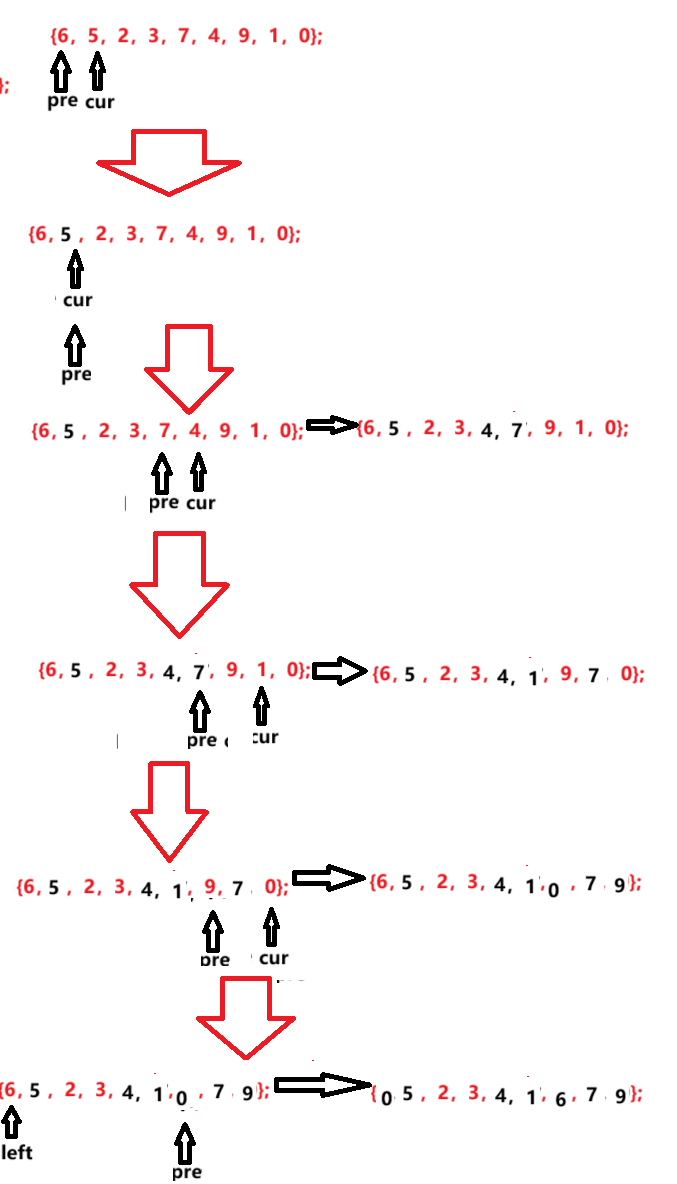
一轮结束后,基准值的下标被放回,实现基准值(6)左边都小于它,右边都大于它。
四、分析快速排序
Hoare、挖坑法、前后指针法这三种方法本质上都是实现快速排序核心思想——分区操作的不同策略,但它们的目标完全一致:
选取一个基准值,将数组划分为两部分,使得左边部分的元素都小于等于基准值,右边部分的元素都大于等于基准值。 基准值最终会落在其正确的位置上。
特性分析
1.三种算法的时间复杂度都是O(n logN);
2.三种算法的空间复杂度都是原地排序O(1),但栈空间消耗完全取决于递归深度,通过用直接插入排序优化,在一定程度上减少了栈空间的消耗。
3.三种算法都是不稳定的!——非相邻交换导致相等元素顺序颠倒的可能性在三种方法中都存在。
4.Hoare最经典,挖坑法最好理解,前后指针法最易编写;
总结
本文是【排序算法】系第六篇,主要介绍了快速排序的思想,以及三种核心算法:Hoare、挖坑法、前后指针法。文章先以Hoare算法为例,将快排整体框架与代码实现,再介绍挖坑法与前后指针法,最后再分析了快排的特性。
笔者水平有限,若文章中有缺漏不正确的地方,还望读者指出,共同进步。
整理不易,希望能帮到你。
读完点赞,手留余香~