西门子PLC S7-1200单轴步进控制电动机
单轴步进控制电动机
1.PLC控制任务说明
现有一项工程,需要通过组态软件对工作台的滑动座步进电动机进行控制,如图5-49所示,具体要
求如下:
①滑动座③由步进电动机②带动丝杠①在轨道上左、右滑行;
②磁性限位开关⑧分别代表左极限、外部参考点、右极限,直接输入到西门子S7-1200 PLC的输入
点; ③滑动座的最大行程为1000mm; ④滑动座可以有左/右点动、速度运行、回原点等功能。
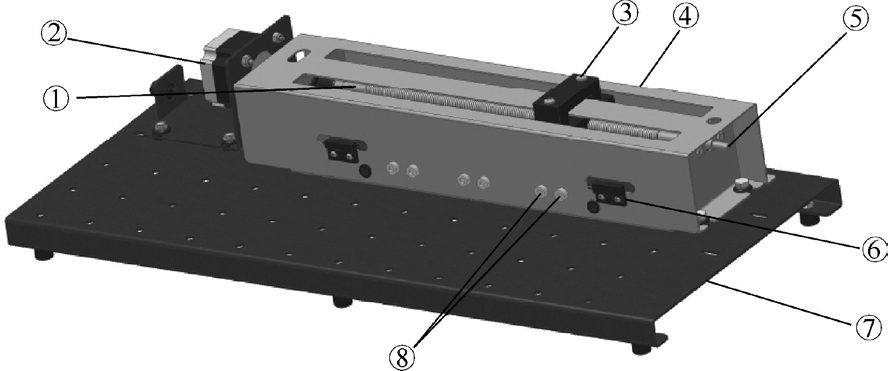
图5-49 工作台的滑动座步进电动机
①丝杠;②步进电动机;③滑动座;④机盖;⑤杆端;⑥左、右机械限位;⑦工作台底座;⑧磁性限位开关(分别是左限位、原点、右限位)
通过组态软件控制工作台滑动座步进电动机的主要元件包括西门子S7-1200 PLC、步进驱动器及步
进电动机。工作台滑动座步进电动机控制的电气接线如图5-50所示。表5-3为工作台滑动座步进电动机控制的输入/输出定义。
2.电气接线
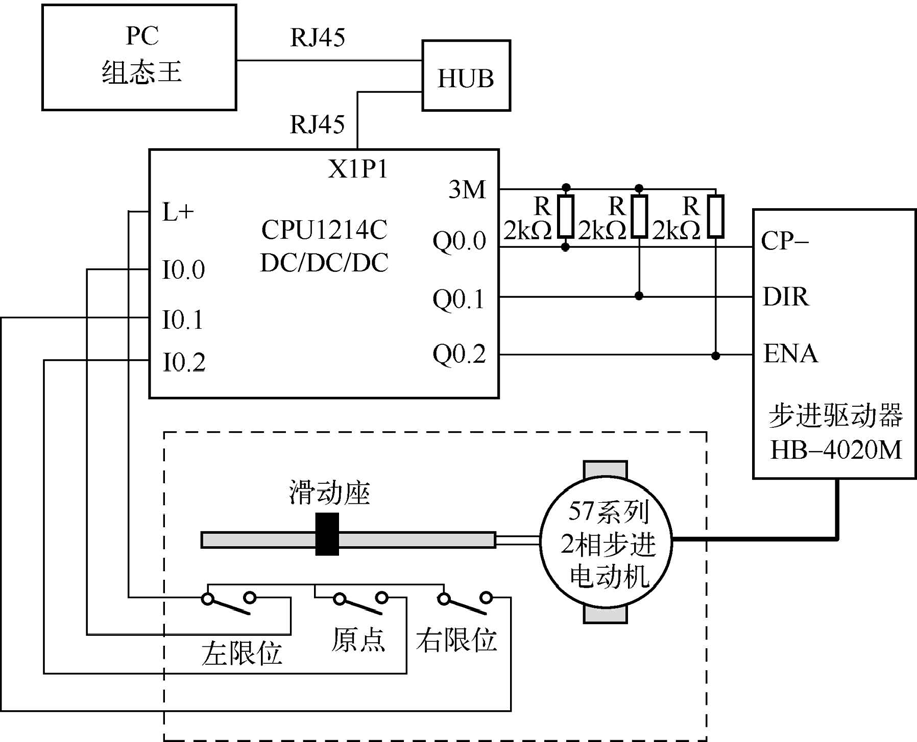
图5-50 工作台滑动座步进电动机控制的电气接线
表5-3 工作台滑动座步进电动机控制的输入/输出定义

3.PLC编程
(1)参考5.2.1节新增工艺对象“轴_1”如图5-51所示,并在组态菜单中填入各个输入/输出点、机械
参数,然后进行简单的调试(在未写主程序的情况下)。注意,与5.2.1节不同的是轴使能的输出点不同。

图5-51 新增工艺对象
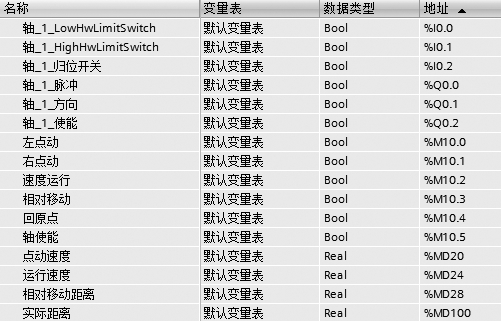
(2)建立PLC参数表见表5-4,包括左点动、右点动、速度运行、相对移动、回原点、轴使能的位
变量M10.0~M10.5,以及点动速度、运行速度、相对移动距离、实际距离的实数变量MD20MD24、MD28和MD100。
表5-4 PLC参数表
(3)编写PLC梯形图程序(见图5-52)。
程序段1以M10.5为变量使用运动控制指令MC_Power启用或禁用“轴_1”。程序段2为调
用MC_Home回原点。程序段3为调用MC_MoveJog指令进行点动控制,包括左点动、右点动、点动速度。程序段4为调用MC_MoveVelocity指令进行左、右速度运行,其中的速度值可以用正、负表示。程序段5为调用MC_Halt指令,在速度运行的控制中,轴会立即按照组态好的减速曲线停车。程序段6为调 用MC_MoveRelative指令进行相对移动。程序段7为调用MC_MoveAbsolute指令进行绝对位置移动(本实例未做拓展,用户可以自行设置)。程序段8为实时显示当前距离。
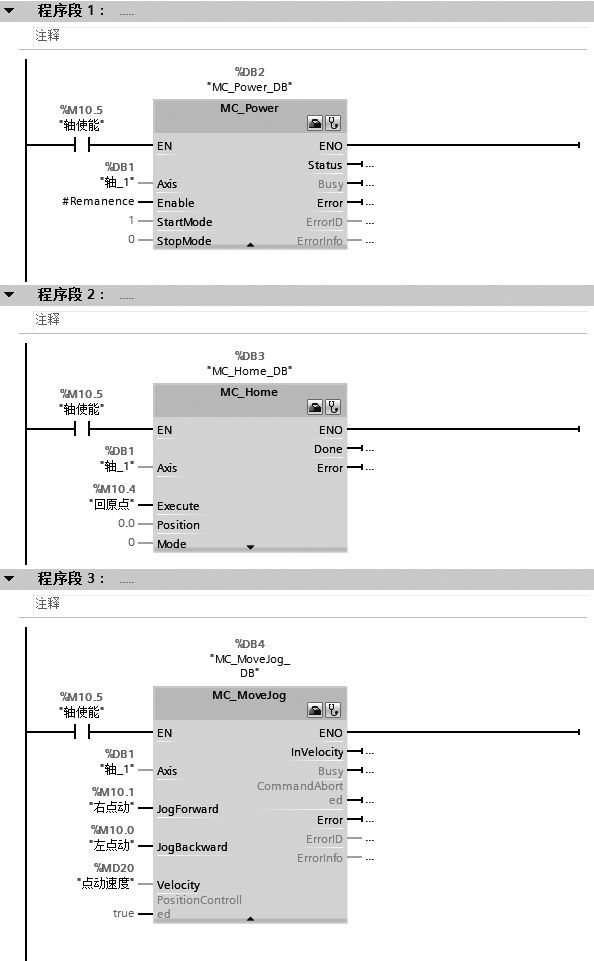
图5-52 单轴步进控制电动机的梯形图
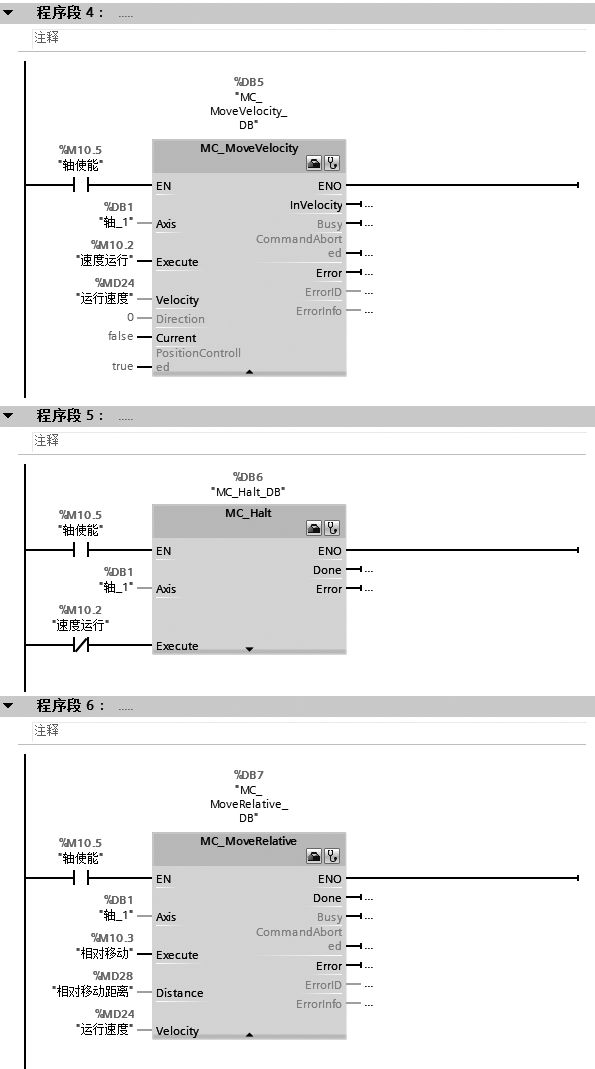
图5-52 单轴步进控制电动机的梯形图(续)
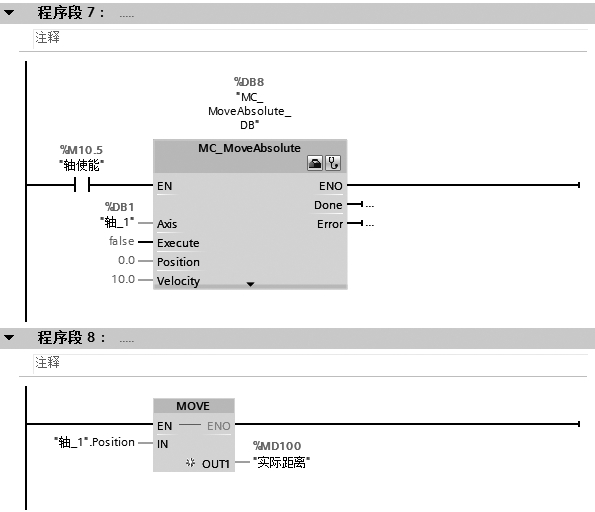
图5-52 单轴步进控制电动机的梯形图(续)
4.组态王操作
(1)根据要求进行组态王变量定义,见表5-5。
表5-5 组态王变量定义

(2)从图库中选择合适的图符,如用游标进行当前位置的定义(见图5-53)、电动机主控开关向导 (见图5-54)等。图中未画出相对移动和绝对移动。
(3)系统运行如图5-55所示。图中,在电动机主控为“开”的情况下,可以设置点动速度进行左点
动、右点动;可以设置运行速度进行速度运行;可以回原点。在上述运行情况下,画面会实时显示当前位置。
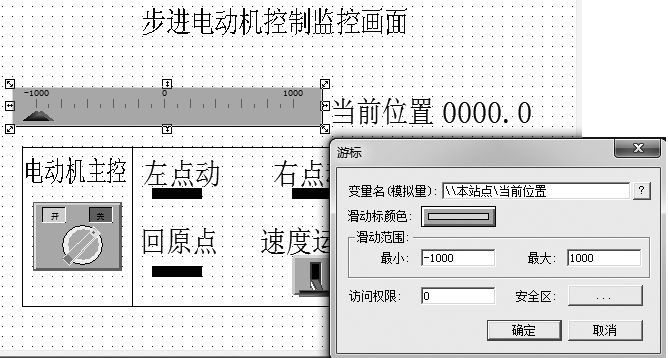
图5-53 游标定义当前位置
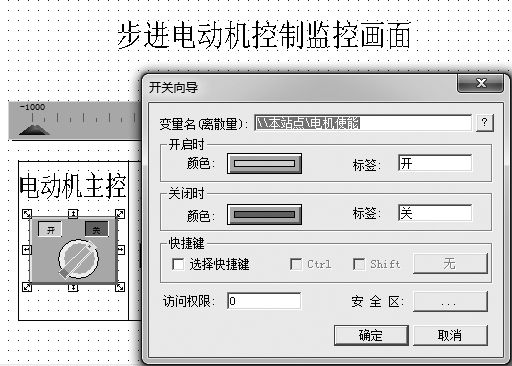
图5-54 电动机主控开关向导
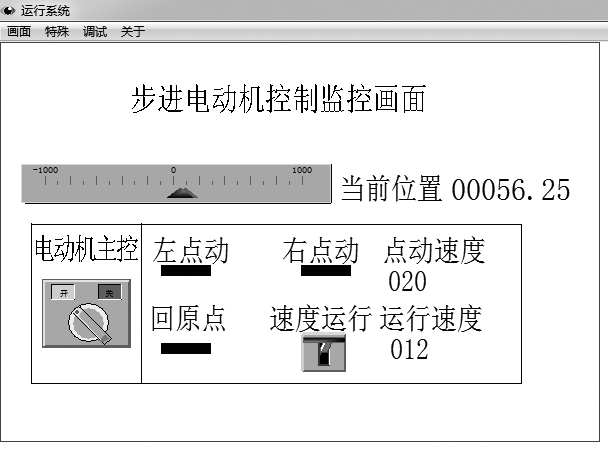
图5-55 运行系统