无人机集群协同三维路径规划,采用冠豪猪优化器(Crested Porcupine Optimizer, CPO)实现,Matlab代码
基本介绍
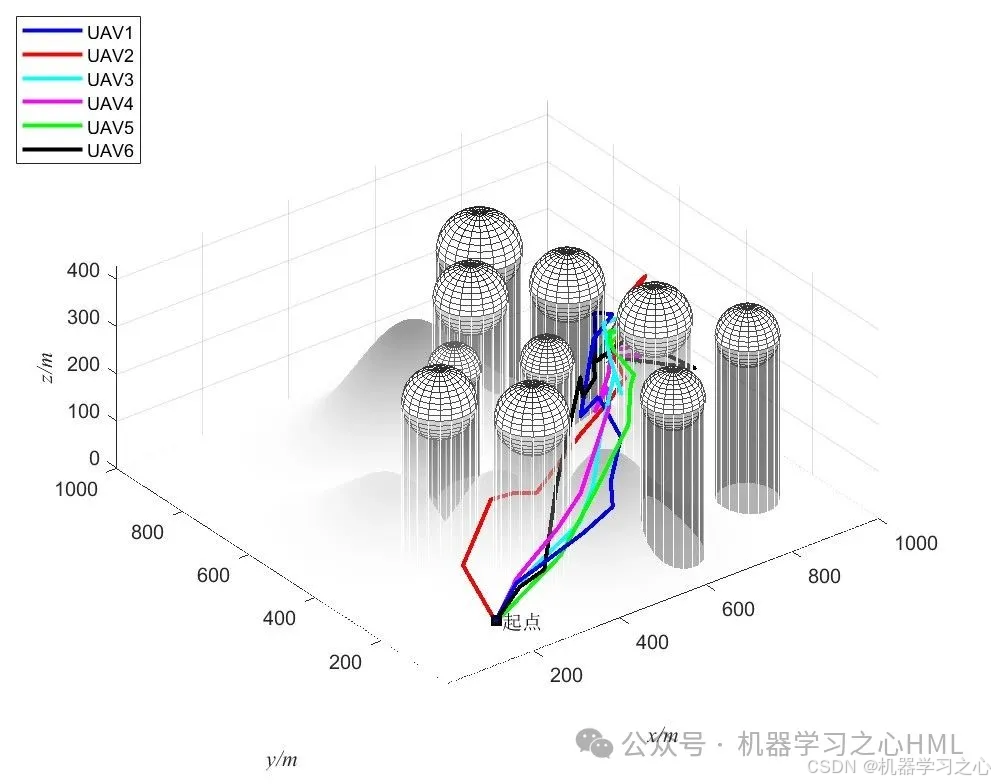
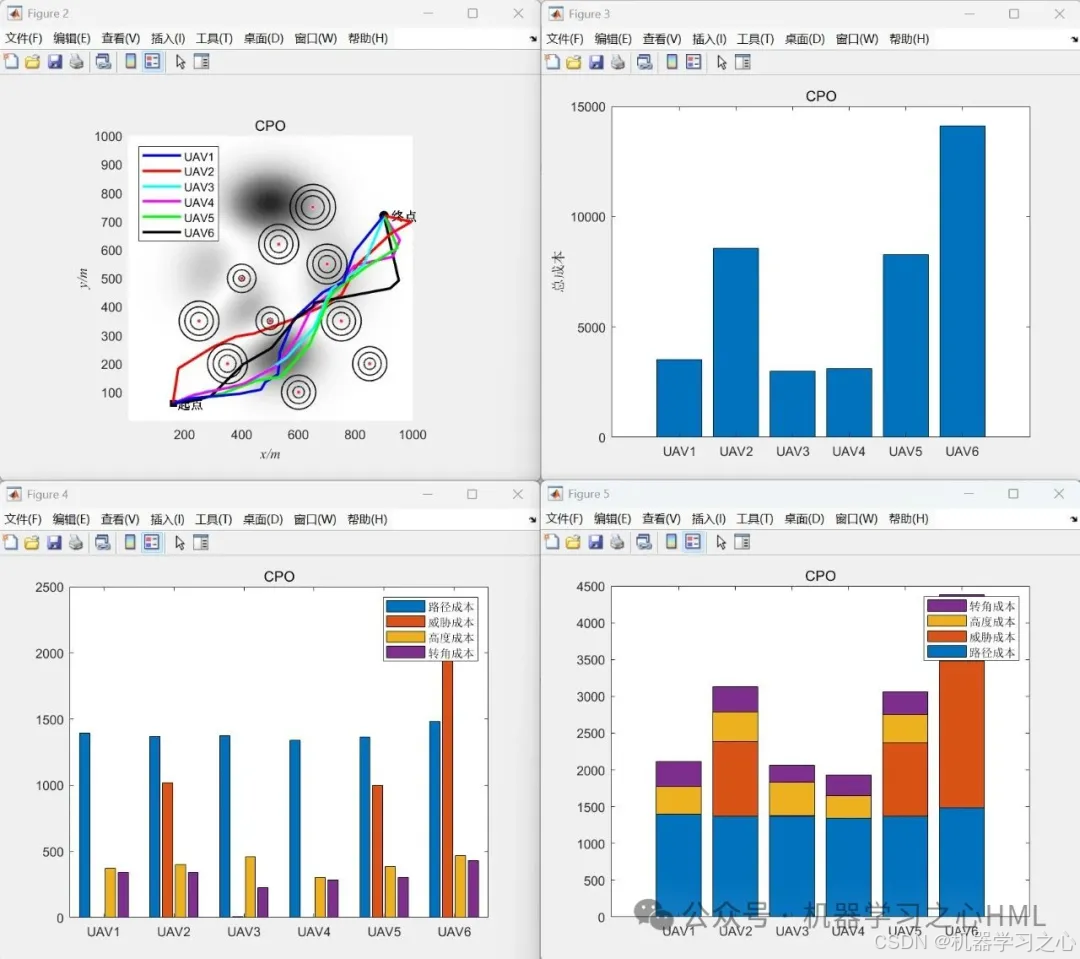
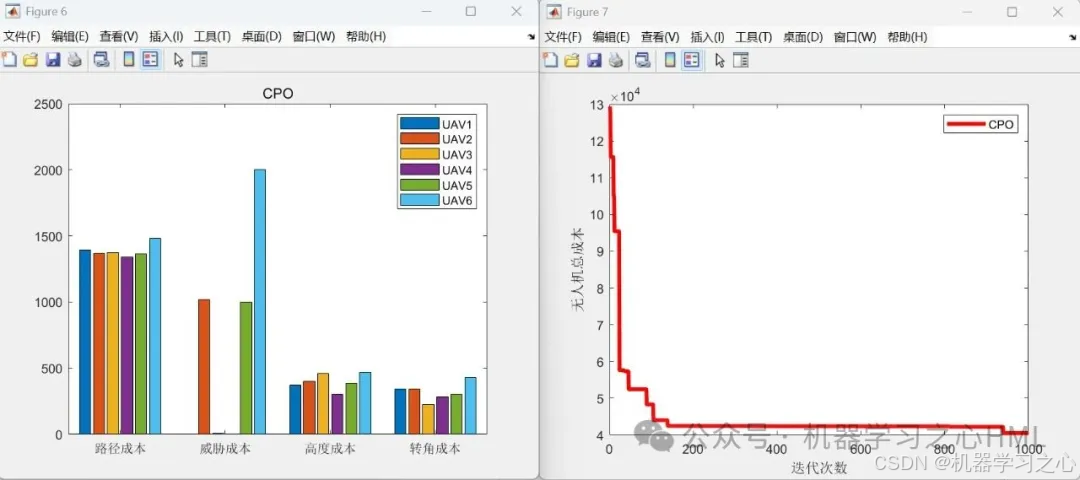
无人机集群协同三维路径规划,智能优化算法优化大揭秘! Matlab 代码分享,不容错过! 算法威力惊人,同时规划六个无人机!无人机集群的目标函数即为总成本,总成本为6个无人机(UAV)成本之和,每个UAV的总成本由四部分构成(路径成本、威胁成本、高度成本和转角成本)。
冠豪猪优化器(Crested Porcupine Optimizer, CPO)是一种新型的智能优化算法,该成果于2024年发表在SCI期刊Knowledge-Based Systems上。CPO算法受到冠豪猪的防御机制和觅食行为的启发,通过模拟冠豪猪的视觉、听觉、气味和物理攻击等行为,实现了对优化问题的高效求解。CPO算法的核心在于其独特的搜索机制,包括觅食阶段、群体协作阶段和自卫阶段,这些阶段共同作用,使得算法能够在复杂的搜索空间中找到最优解。
代码功能
1. main.m (主程序)
- 功能:无人机路径规划的主流程控制
- 关键步骤:
- 初始化环境(清除变量、添加工具箱路径)
- 创建地形模型(
CreateModel) - 获取优化问题参数(
fun_info) - 设置优化算法参数(种群大小100,迭代次数1000)
- 执行CPO优化算法
- 可视化路径规划结果和收敛曲线
- 输出:
- 最优路径
bestX - 收敛曲线
convergenceCurve - 路径规划图
- 最优路径
2. MyCost.m (成本计算)
- 功能:计算无人机路径的4种成本
- 成本构成:
- 路径长度成本(J1):∑∥pi+1−pi∥\sum \| \mathbf{p}_{i+1} - \mathbf{p}_i \|∑∥pi+1−pi∥
- 威胁成本(J2):基于点到威胁区域距离
- 碰撞:Jinf=1000J_{inf}=1000Jinf=1000
- 危险区:(rthreat+dsafe)−dist(r_{threat} + d_{safe}) - dist(rthreat+dsafe)−dist
- 高度成本(J3):∑∣zi−zmax+zmin2∣\sum |z_i - \frac{z_{max}+z_{min}}{2}|∑∣zi−2zmax+zmin∣
- 平滑成本(J4):转弯角/爬升角变化惩罚
- 加权总成本:cost=1⋅J1+5⋅J2+1⋅J3+5⋅J4cost = 1\cdot J1 + 5\cdot J2 + 1\cdot J3 + 5\cdot J4cost=1⋅J1+5⋅J2+1⋅J3+5⋅J4
3. CreateModel.m (环境建模)
- 功能:创建无人机飞行环境模型
- 建模要素:
- 地形高程:
H = 30*abs(peaks(1000)) - 威胁区域:10个圆柱体障碍物(位置+半径)
- 起止点:start=[160,60,50], end=[900,720,50]
- 空间约束:
- x∈[1,1000], y∈[1,1000], z∈[100,200]
- 路径点数:n=10
- 地形高程:
4. Cost.m (多无人机成本聚合)
- 功能:计算多无人机系统的总成本
- 处理逻辑:
- 单目标模式:各无人机成本直接相加
- 多目标模式:返回[总路径长, 总威胁成本]的Pareto前沿
- 决策变量分割:X=[Xdrone1,Xdrone2,...,XdroneN]X = [X_{drone1}, X_{drone2}, ..., X_{droneN}]X=[Xdrone1,Xdrone2,...,XdroneN]
5. fun_info.m (问题定义)
- 功能:定义优化问题参数
- 关键参数:
- 决策变量维度:dim=3×n×Ndim=3 \times n \times Ndim=3×n×N (N=6架无人机)
- 变量范围:
- r∈[0,2∥Pstart−Pend∥/n]r \in [0, 2\|P_{start}-P_{end}\|/n]r∈[0,2∥Pstart−Pend∥/n]
- ψ,ϕ∈[ϕ0±π/4]\psi, \phi \in [\phi_0 \pm \pi/4]ψ,ϕ∈[ϕ0±π/4] (方位角/俯仰角)
- 目标函数:
fobj = @(x)Cost(x,1)
6. SphericalToCart.m (坐标转换)
- 功能:球坐标→笛卡尔坐标转换
- 转换公式:
x = x_prev + r·cosψ·sinφ y = y_prev + r·cosψ·cosφ z = z_prev + r·sinψ - 边界处理:约束在模型空间范围内
逻辑关联图
main.m → 调用 → CreateModel (环境建模)│├→ fun_info (问题定义)│└→ CPO优化器 → 重复调用 → Cost.m → 调用 → MyCost.m│ ││ └→ SphericalToCart (坐标转换)│└→ 输出 → plotFigure (结果可视化)
算法步骤 (CPO核心流程)
-
初始化:
- 在球坐标空间随机生成初始种群
- 计算各粒子的适应度(MyCost)
-
迭代优化:
for gen in range(maxgen):更新粒子位置(球坐标空间)坐标转换(SphericalToCart)成本评估(Cost → MyCost)更新个体/全局最优解记录收敛曲线 -
结果提取:
- 获取全局最优解
bestX - 转换为笛卡尔坐标路径
- 可视化飞行路径
- 获取全局最优解
技术路线
球坐标参数化 → 群体智能优化(CPO) → 多成本加权评估 → 路径可行性验证
关键公式原理
-
威胁距离计算:
- 点P到线段AB的距离:
dist=∥(B−A)×(A−P)∥∥B−A∥dist = \frac{\| (B-A) \times (A-P) \|}{\|B-A\|}dist=∥B−A∥∥(B−A)×(A−P)∥
- 点P到线段AB的距离:
-
爬升角计算:
θclimb=tan−1(ΔzΔx2+Δy2)θ_{climb} = \tan^{-1}\left(\frac{\Delta z}{\sqrt{\Delta x^2 + \Delta y^2}}\right)θclimb=tan−1(Δx2+Δy2Δz) -
转弯角计算:
θturn=cos−1(v1⃗⋅v2⃗∥v1⃗∥∥v2⃗∥)θ_{turn} = \cos^{-1}\left(\frac{\vec{v_1} \cdot \vec{v_2}}{\|\vec{v_1}\|\|\vec{v_2}\|}\right)θturn=cos−1(∥v1∥∥v2∥v1⋅v2)
参数设定
| 参数类型 | 参数名 | 值/范围 | 说明 |
|---|---|---|---|
| 环境参数 | MAP_SIZE | 1000×1000 | 地形图尺寸 |
| z_range | [100,200] | 飞行高度范围 | |
| 算法参数 | pop | 100 | 种群规模 |
| maxgen | 1000 | 最大迭代次数 | |
| 路径参数 | n | 10 | 单无人机路径点数 |
| N | 6 | 无人机数量 | |
| 成本权重 | b1,b2,b3,b4 | 1,5,1,5 | 路径长/威胁/高度/平滑权重 |
| 物理约束 | ψ_max | 45° | 最大爬升角 |
| φ_max | 45° | 最大转弯角 |
运行环境要求
-
软件环境:
- MATLAB R2023b
- 自定义工具箱:
muavbox
-
文件依赖:
main.m └─ muavbox/ (自定义工具箱)
创新点
- 球坐标参数化:将3D路径规划转换为(r,ψ,φ)的优化问题
- 多成本联合优化:路径长度/威胁规避/高度保持/飞行平滑性
- 多机协同规划:6架无人机集群优化(决策变量维度=3×10×6=180)
- 地形融合:通过高程矩阵H实现真实地形建模
- 物理约束集成:转弯角/爬升角/飞行高度等现实约束
该解决方案实现了复杂地形下多无人机协同路径规划,通过群体智能算法在满足多种物理约束的前提下,优化飞行安全性和效率。
运行效果
代码内容