【03】大恒相机SDK C#开发 —— 回调采集图像,关闭相机
文章目录
- 1 回调采集图像、
- 1.1 创建回调函数
- 1.2 注册回调函数
- 1.3 运行测试
- 2 停止采集和关闭相机
- 3 视频教程
在上一讲,基础上继续修改代码:
1 回调采集图像、
1.1 创建回调函数
//创建回调函数
//其中回调函数中包含一个自定义变量和一个图像数据
//创建回调函数//其中回调函数中包含一个自定义变量和一个图像数据public static void _CallCaptureBack(object userParam, IFrameData frameData){//获取并打印图像宽高ulong height = frameData.GetHeight();ulong width = frameData.GetWidth();Console.WriteLine("图像高:" + height.ToString() + "宽 :" + width.ToString());}
回调函数创建完成后,需要在相机流对象中进行注册;
void RegisterCaptureCallback(object objUserParam, CaptureDelegate delCaptureFun);
1.2 注册回调函数
需要注意的是,注册回调函数需要在流通道开始采集之前进行;
自定义参数可以是任意参数,调第二个参数则为刚才创建的回调函数;
//注册回调函数//RegisterCaptureCallback(,)自定义参数可以是任意参数,调第二个参数则为刚才创建的回调函数;cam_stream.RegisterCaptureCallback(cam,_CallCaptureBack);
1.3 运行测试
完整代码
using System;
using System.Collections.Generic;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
using GxIAPINET;namespace DaHC_
{internal class Program{static void Main(string[] args){//首先,找到相机//第一步,对相机资源进行初始化IGXFactory.GetInstance().Init();//第二部,枚举相机//先定义一个设备列表,用来存放枚举到的设备List<IGXDeviceInfo> iGXDeviceInfos = new List<IGXDeviceInfo>();//枚举同一网段下的相机 无ALLIGXFactory.GetInstance().UpdateDeviceList(1000,iGXDeviceInfos);//枚举同一网络下所有相机 有ALL//IGXFactory.GetInstance().UpdateAllDeviceList(1000, iGXDeviceInfos);//第三步,获取相机信息,如IP、ID、SN等//枚举到相机后,就可以获取到相机的一些设备信息string IP = iGXDeviceInfos[0].GetIP();string ID = iGXDeviceInfos[0].GetSN();string SN = iGXDeviceInfos[0].GetSN(); Console.WriteLine("第一个设备的IP:"+ IP);Console.WriteLine("第一个设备的ID:"+ ID);Console.WriteLine("第一个设备的SN:"+ SN);//第四步,打开相机,可以通过IP、SN、MAC、ID等唯一标识符打开相机//这里通过SN打开相机,打开相机的方式有三种: 只读、控制、独占IGXDevice cam = IGXFactory.GetInstance().OpenDeviceBySN(SN, GX_ACCESS_MODE.GX_ACCESS_CONTROL);//控制方式打开//第五步,打开相机后,准备开始采集图像//首先打开流通道//uint cam_num = cam.GetStreamCount();IGXStream cam_stream = cam.OpenStream(0);//默认打开第一个流通道 //注册回调函数//RegisterCaptureCallback(,)自定义参数可以是任意参数,调第二个参数则为刚才创建的回调函数;cam_stream.RegisterCaptureCallback(cam,_CallCaptureBack);//流通道开始采集cam_stream.StartGrab();//获取远端属性控制器IGXFeatureControl cam_remote_control = cam.GetRemoteFeatureControl();//发送开采命令,设备参数字符串可以去文档里查看cam_remote_control.GetCommandFeature("AcquisitionStart").Execute();}//创建回调函数//其中回调函数中包含一个自定义变量和一个图像数据public static void _CallCaptureBack(object userParam, IFrameData frameData){//获取并打印图像宽高ulong height = frameData.GetHeight();ulong width = frameData.GetWidth();Console.WriteLine("图像高:" + height.ToString() + "宽 :" + width.ToString());}}
}2 停止采集和关闭相机
-
停止采集和开始采集的方法是相同的;区别只在于发送的字符命令不同;
-
关闭相机首先需要先停止流采集;再注销前面所注册的所有回调函数;
-
最后记得通过反初始化释放所有资源;
//停止采集和关闭相机
//关闭相机首先需要先停止流采集;再注销前面所注册的所有回调函数;
//停止采集和关闭相机//关闭相机首先需要先停止流采集;再注销前面所注册的所有回调函数;//关闭采集命令cam_remote_control.GetCommandFeature("AcquisitionStop").Execute();//关闭流通道cam_stream.StopGrab();//关闭回调函数cam_stream.UnregisterCaptureCallback();//最后通过反初始化释放所有资源;IGXFactory.GetInstance().Uninit();
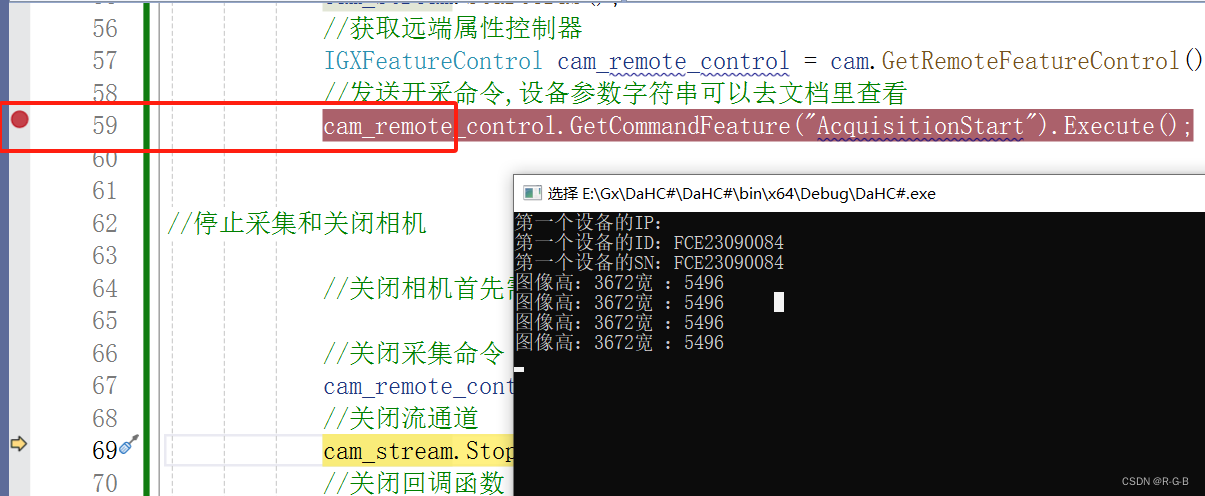
需要打断点,运行后,按F0 调试,才可以看到 图像输出 宽、高;
否则,运行一闪而过就没了;还没来的及输出,流就被关闭了,输出窗口也会变关闭;
完整代码
using System;
using System.Collections.Generic;
using System.Linq;
using System.Text;
using System.Threading.Tasks;
using GxIAPINET;namespace DaHC_
{internal class Program{static void Main(string[] args){//首先,找到相机//第一步,对相机资源进行初始化IGXFactory.GetInstance().Init();//第二部,枚举相机//先定义一个设备列表,用来存放枚举到的设备List<IGXDeviceInfo> iGXDeviceInfos = new List<IGXDeviceInfo>();//枚举同一网段下的相机 无ALLIGXFactory.GetInstance().UpdateDeviceList(1000,iGXDeviceInfos);//枚举同一网络下所有相机 有ALL//IGXFactory.GetInstance().UpdateAllDeviceList(1000, iGXDeviceInfos);//第三步,获取相机信息,如IP、ID、SN等//枚举到相机后,就可以获取到相机的一些设备信息string IP = iGXDeviceInfos[0].GetIP();string ID = iGXDeviceInfos[0].GetSN();string SN = iGXDeviceInfos[0].GetSN(); Console.WriteLine("第一个设备的IP:"+ IP);Console.WriteLine("第一个设备的ID:"+ ID);Console.WriteLine("第一个设备的SN:"+ SN);
//打开相机//第四步,打开相机,可以通过IP、SN、MAC、ID等唯一标识符打开相机//这里通过SN打开相机,打开相机的方式有三种: 只读、控制、独占IGXDevice cam = IGXFactory.GetInstance().OpenDeviceBySN(SN, GX_ACCESS_MODE.GX_ACCESS_CONTROL);//控制方式打开//准备开始采集图像//第五步,打开相机后,准备开始采集图像//首先打开流通道//uint cam_num = cam.GetStreamCount();IGXStream cam_stream = cam.OpenStream(0);//默认打开第一个流通道 //注册回调函数//RegisterCaptureCallback(,)自定义参数可以是任意参数,调第二个参数则为刚才创建的回调函数;cam_stream.RegisterCaptureCallback(cam,_CallCaptureBack);//流通道开始采集cam_stream.StartGrab();//获取远端属性控制器IGXFeatureControl cam_remote_control = cam.GetRemoteFeatureControl();//发送开采命令,设备参数字符串可以去文档里查看cam_remote_control.GetCommandFeature("AcquisitionStart").Execute();//停止采集和关闭相机//关闭相机首先需要先停止流采集;再注销前面所注册的所有回调函数;//关闭采集命令cam_remote_control.GetCommandFeature("AcquisitionStop").Execute();//关闭流通道cam_stream.StopGrab();//关闭回调函数cam_stream.UnregisterCaptureCallback();//最后通过反初始化释放所有资源;IGXFactory.GetInstance().Uninit();}//创建回调函数//其中回调函数中包含一个自定义变量和一个图像数据public static void _CallCaptureBack(object userParam, IFrameData frameData){//获取并打印图像宽高ulong height = frameData.GetHeight();ulong width = frameData.GetWidth();Console.WriteLine("图像高:" + height.ToString() + "宽 :" + width.ToString());}}
}3 视频教程
【大恒工业相机SDK开发C#版】回调采集图像,关闭相机