LRU(Least Recently Used)原理及算法实现
1.前言
LRU(Least Recently Used,最近最少使用) 是一种经典的 缓存淘汰算法,用于在缓存空间不足时决定哪些数据应被移除。其核心思想是:优先淘汰最长时间未被访问的数据,保留最近被访问的数据。
这里制定的规则是最近最少使用,如果等效为优先级最高,那么其实和RTOS任务切换的最高优先级任务选择的场景是几乎相同的。当然,RTOS中使用了双向链表维护就绪态任务列表数组,并按优先级进行了排序。
2.实现方式
LRU 缓存的核心规则是:
①当访问(get)或插入(put)数据时,将该数据标记为 “最近使用”。
②当缓存满时,新插入数据会淘汰 “最久未被使用” 的数据。
要实现这一规则,需要高效支持两个操作:
①快速查找数据(判断是否存在)。
②快速移动或删除数据(更新 “最近使用” 状态)。
1. 双向链表 + 哈希表(O(1)复杂度)
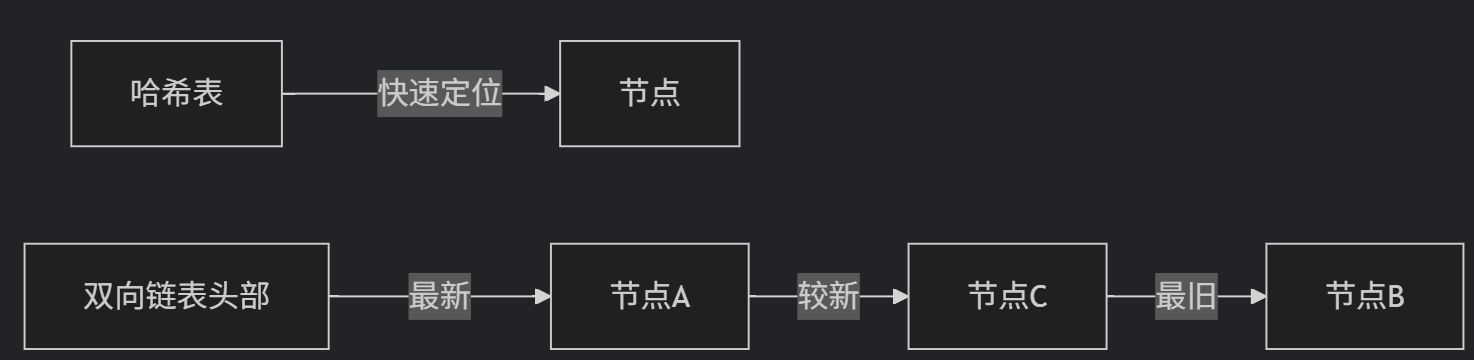
如上图所示,通过哈希映射来快速定位节点位置,双向链表用于维护节点信息,越接近链表尾部的节点最近使用最少。相关实现涉及的操作如下:
访问数据:将节点移到链表头部;
淘汰数据:删除链表尾部节点;
新增数据:插入链表头部;
2. 代码实现
class LRUCache
{
private:list<pair<int, int>> cache; // 双向链表:key-valueunordered_map<int, list<pair<int, int>>::iterator> map; // key->链表节点指针int capacity; //缓存的最大容量,超过此容量时需要淘汰数据。public:LRUCache(int cap) : capacity(cap) {}//根据key查找缓存中的值,若存在则返回值,并将该数据标记为 “最近使用”;若不存在则返回-1。int get(int key){if(map.find(key) == map.end()) { return -1; //若不存在,返回-1。} cache.splice(cache.begin(), cache, map[key]); //移至链表头部(标记最近使用) return map[key]->second; //返回该节点的value}//插入新的key-value,或更新已有key的值,并将其标记为 “最近使用”;若缓存满,则淘汰最久未使用的数据。void put(int key, int value) { if(map.find(key) != map.end()) //若key已存在{ map[key]->second = value; //更新值 cache.splice(cache.begin(), cache, map[key]); //用splice将节点移到链表头部return;}if(cache.size() == capacity) // 缓存满,淘汰尾部{auto last = cache.back();map.erase(last.first); // 从哈希表删除该节点的keycache.pop_back(); // 从链表删除尾部节点}// 新数据插入头部cache.emplace_front(key, value);map[key] = cache.begin();}
};| 变量 | 类型 | 作用 |
|---|---|---|
cache | list<pair<int, int>> | 双向链表,存储key-value键值对。链表头部是 “最近使用” 的数据,尾部是 “最久未使用” 的数据。 |
map | unordered_map<int, list::iterator> | 哈希表,键为key,值为链表中对应节点的迭代器(指针)。用于快速定位链表中的节点,避免遍历链表。 |
capacity | int | 缓存的最大容量,超过此容量时需要淘汰数据。 |
3.汽车 ADAS 系统的传感器缓存
在资源有限的嵌入式系统中,优先保留最近使用的传感器数据(如刹车温度),可快速响应紧急事件。
#define CACHE_SIZE 10
typedef struct {int sensor_id;float data;uint32_t last_access;bool valid; // 增加有效性标志位
} SensorCache;SensorCache cache[CACHE_SIZE] = {0}; // 初始化全为invalid// 时间戳获取函数(1us分辨率)
uint32_t get_timestamp()
{return DWT->CYCCNT / (SystemCoreClock / 1000000);
}void update_cache(int id, float value)
{int empty_slot = -1; // 记录可用空槽int lru_index = -1; // 真实LRU槽位uint32_t oldest = 0xFFFFFFFF;// 第一遍扫描:查找匹配和空槽for(int i=0; i<CACHE_SIZE; i++) {// 情况1:找到匹配传感器if(cache[i].valid && cache[i].sensor_id == id) {cache[i].data = value;cache[i].last_access = get_timestamp();return; // 直接返回}// 情况2:记录空槽位置if(!cache[i].valid) {empty_slot = i; // 不break,继续找可能的匹配项}}// 第二遍扫描:仅当无空槽时寻找真实LRUif(empty_slot == -1) {for(int i=0; i<CACHE_SIZE; i++) {if(cache[i].valid && cache[i].last_access < oldest) {oldest = cache[i].last_access;lru_index = i;}}} else {lru_index = empty_slot; // 优先使用空槽}// 更新缓存cache[lru_index].sensor_id = id;cache[lru_index].data = value;cache[lru_index].last_access = get_timestamp();cache[lru_index].valid = true; // 标记有效
}