VLA--Gemini Robotics On-Device: 将AI带到本地机器人设备上
更多内容:XiaoJ的知识星球
目录
- 1. 一种高效、本地的机器人模型
- 2. 模型能力和性能
- 3. 可适应新任务,跨实体泛化
- 4. Gemini Robotics SDK
- 5. MuJoCo物理模拟器
- 参考
.
Gemini Robotics On-Device:谷歌DeepMind推出可本地运行于机器人本体的高效通用 VLA(视觉语言行动)模型,具备灵巧操作与快速任务适应能力,断网也能低延迟稳定工作。搭配 Gemini Robotics SDK ,可在 MuJoCo 模拟器或真实环境中评测与微调模型。
.
1. 一种高效、本地的机器人模型
今年 3 月,Google 推出了 Gemini Robotics,一个先进的 VLA(视觉语言行动)模型,将 Gemini 2.0 的多模态推理和现实世界理解带入物理世界。
紧接着,Google 推出 Gemini Robotics On-Device,一个很强大的 VLA 模型,专为在机器人设备本地运行而优化。Gemini Robotics On-Device 展现出强大的通用灵巧性和任务泛化能力,并且针对在机器人本身高效运行进行了优化。由于该模型独立于数据网络运行,因此它适用于对延迟敏感的应用,并确保在间歇性或无连接的环境中保持稳健性。
还提供 Gemini Robotics SDK ,帮助开发者轻松在他们的任务和环境上评估 Gemini Robotics On-Device,在 MuJoCo 物理模拟器中测试我们的模型,并快速将其应用于新领域,只需 50 到 100 个演示即可。开发者可以通过加入可信测试者计划来获取 SDK。
.
2. 模型能力和性能
Gemini Robotics On-Device 是一款双臂机器人的机器人基础模型,对计算资源要求极低。它在 Gemini Robotics 的任务泛化与灵巧操作能力之上,进一步具备:
-
面向灵巧操控的快速实验设计
-
通过微调即可适应新任务并提升表现
-
本地低延迟推理优化
该模型在多种测试场景中展现出卓越的视觉、语义与行为泛化能力,可理解自然语言指令,并完成诸如拉开拉链、折叠衣物等高灵巧度任务——全部直接在机器人端运行。
Gemini Robotics On-Device 强大的泛化性能和指令跟随性能表现。
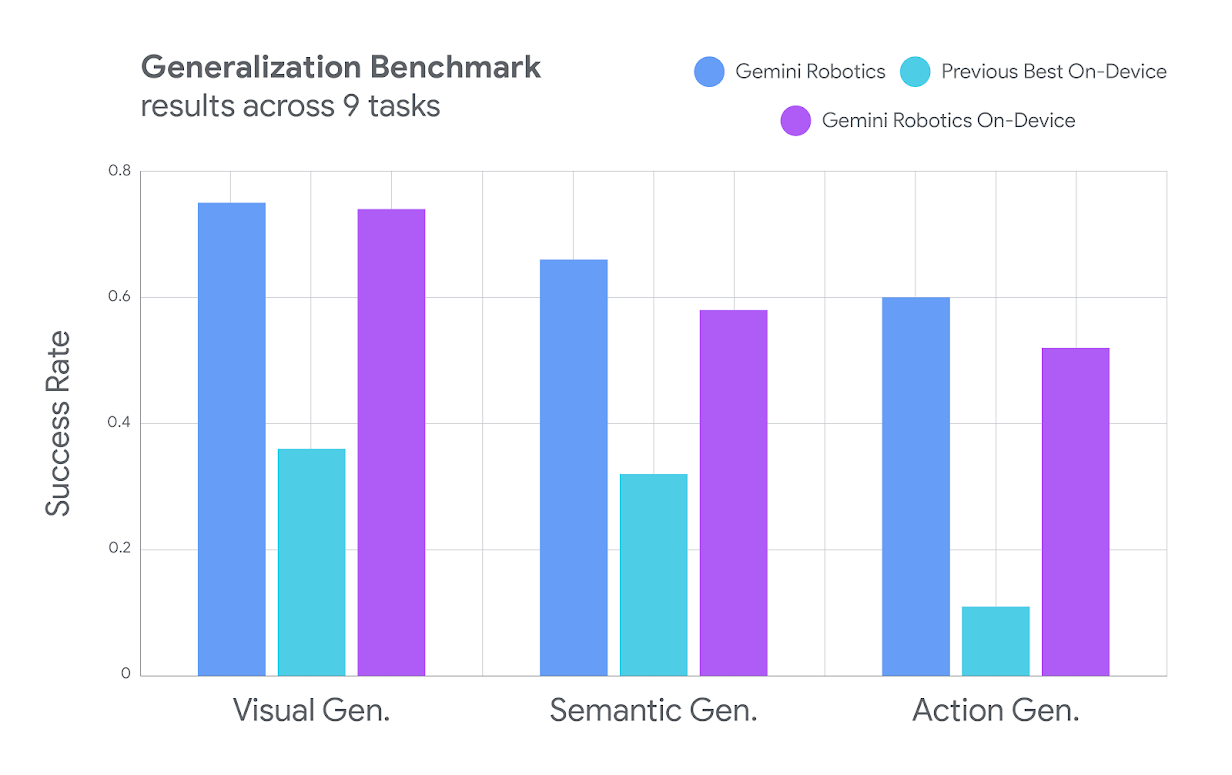
图表:评估 Gemini Robotics On-Device 泛化性能的图表
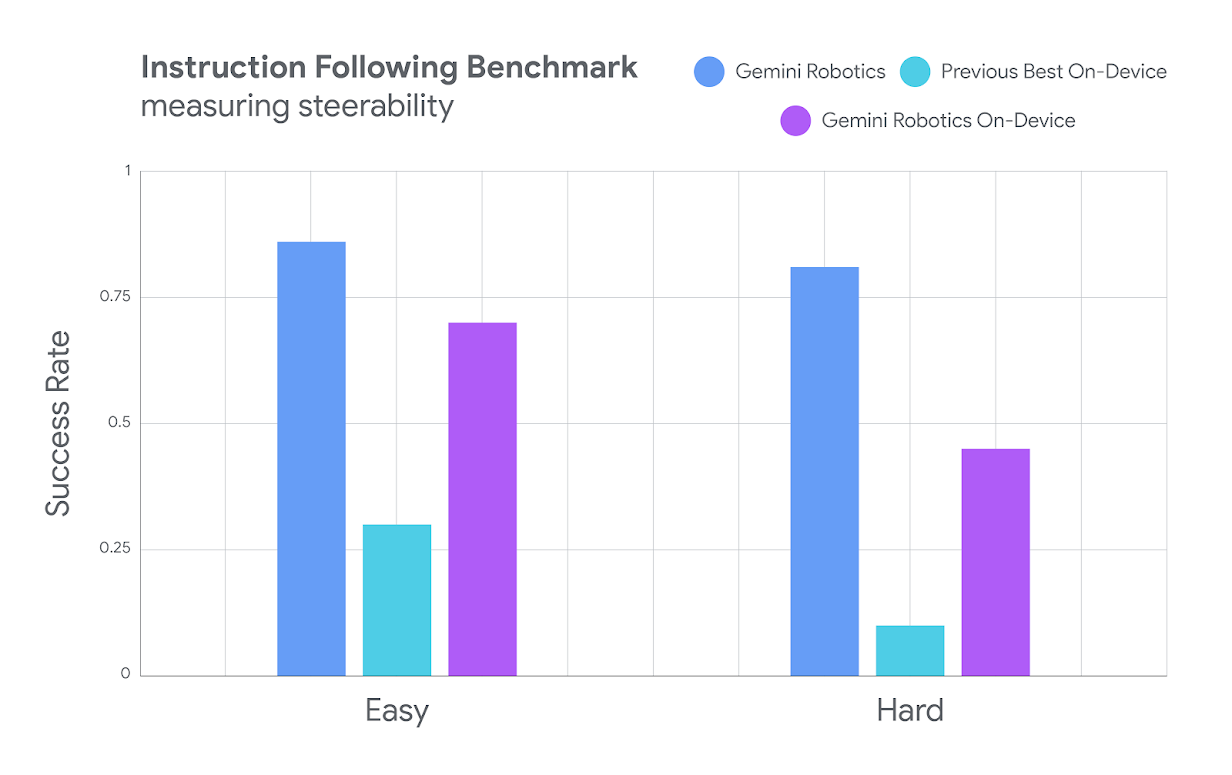
图表:评估 Gemini Robotics On-Device 指令跟随性能的图表
.
3. 可适应新任务,跨实体泛化
Gemini Robotics On-Device 是谷歌DeepMind首次提供的可用于微调的 VLA 模型。虽然许多任务可以直接使用,但开发者也可以选择调整模型以实现其应用更好的性能。我们的模型能够快速适应新任务,只需 50 到 100 个示例即可——这表明该设备模型能够多么好地将其基础知识泛化到新任务中。
这里,展示了 Gemini Robotics On-Device 在涉及针对新模型进行微调的任务上,如何优于当前的最好设备端 VLA。我们在七个不同难度的灵巧操作任务上测试了该模型,包括系午餐盒、抽牌和倒沙拉酱等。
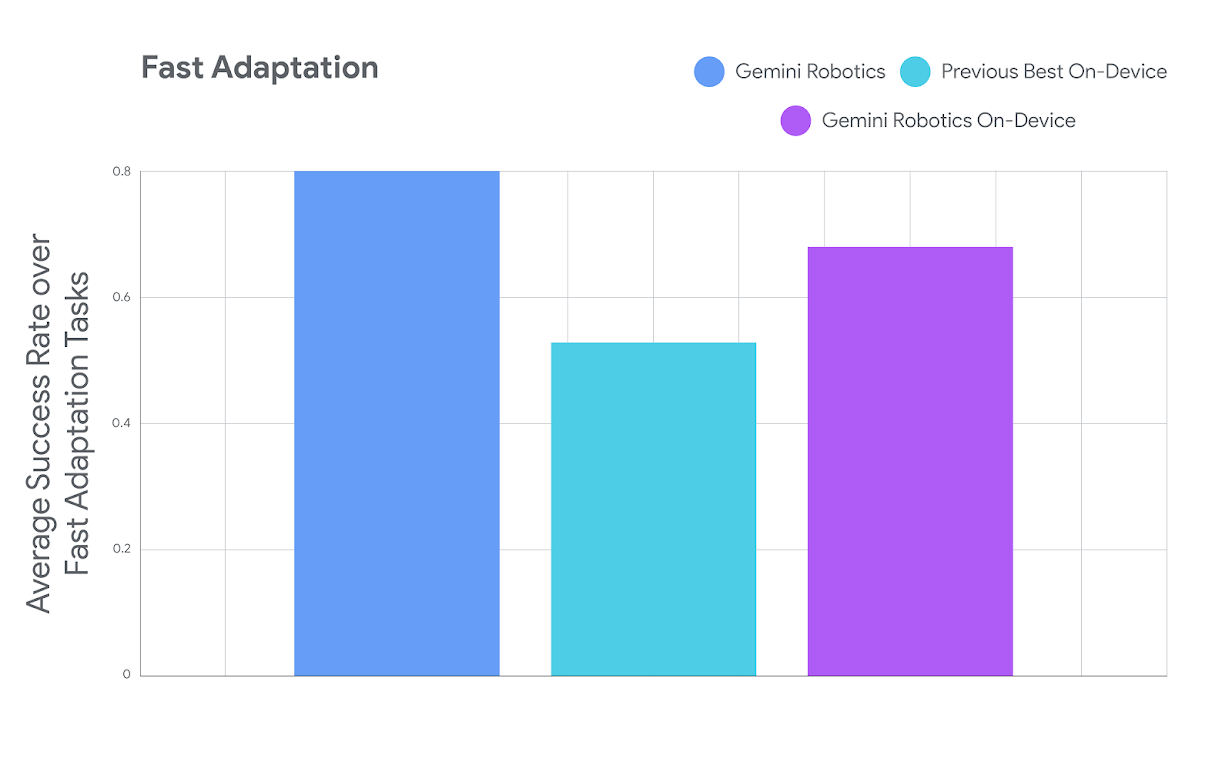
图表:展示 Gemini Robotics On-Device 任务适应性能的图表
可将 Gemini Robotics On-Device 模型适配到不同的机器人形态上。虽然训练是在 ALOHA 机器人,但能够进一步将其适配到双臂 Franka FR3 机器人和 Apptronik 的 Apollo 人形机器人。
-
在双臂 Franka 机器人上,该模型执行通用指令跟随,包括处理先前未见过的物体和场景,完成折叠衣服等灵巧任务,或执行需要精确度和灵巧性的工业皮带组装任务。
-
在 Apollo 人形机器人上,可将模型适配于一个显著不同的形态。相同的通用模型可以遵循自然语言指令,并以通用方式操作不同的物体,包括之前未见过的物体。
.
4. Gemini Robotics SDK
Gemini Robotics SDK:https://github.com/google-deepmind/gemini-robotics-sdk:https://github.com/google-deepmind/gemini-robotics-sdk
Safari SDK 提供了使用 Gemini Robotics 模型系列中的所有模型所需的完整生命周期工具,包括但不限于,访问检查点、部署模型、在机器人和模拟环境中评估模型、上传数据、微调模型、下载微调后的检查点等。大多数功能需要您加入 Gemini Robotics 可信测试者计划才能使用。
.
1)安装
Safari SDK 可以通过 PyPI 轻松安装。
pip install safari_sdk
源代码可在 https://github.com/google-deepmind/gemini-robotics-sdk 上找到。
.
2)构建wheel
构建Python wheel:
scripts/build_wheel.sh
这个脚本将构建一个可用于 pip 安装的 Safari SDK 轮子,并将文件路径打印到标准输出。
.
3)Flywheel CLI
Flywheel CLI 是在安装 pip 包后可用的便捷 CLI 工具。它提供了一套与 Gemini Robotics 平台交互的命令,例如训练模型、服务模型、管理数据和下载工件。
要使用 CLI:
flywheel-cli <command> [--flags] [--flags]
支持的命令有:
-
train:训练一个模型。需要指定任务 ID、开始日期和结束日期。 -
serve:部署一个模型。需要指定训练作业 ID。 -
list:列出可用的训练作业。 -
list_serve: 列出可用的服务任务。 -
data_stats: 显示可用于训练的数据统计信息。 -
download: 从训练任务或特定的工件 ID 下载工件。 -
upload_data: 将数据上传到数据摄取服务。 -
version: 显示 SDK 的版本。 -
help: 显示所有可用命令和标志的帮助信息。
.
5. MuJoCo物理模拟器
MuJoCo物理模拟器:https://github.com/google-deepmind/aloha_sim
Aloha Sim 是一个定义 Aloha 机器人模拟环境的 Python 库。它包含一系列用于机器人学习和评估的任务。
.
1)安装
使用 pip 安装:
# create a virtual environment and pip install
pip install -e .
或者直接使用 uv 运行
pip install uv
uv run <script>.py
告诉 Mujoco 使用哪个后端,否则模拟将会非常慢
export MUJOCO_GL='egl'
.
2)测试
# 在没有策略的情况下与场景交互
python aloha_sim/viewer.py --policy=no_policy --task_name=HandOverBanana# individual tests
python aloha_sim/tasks/test/aloha2_task_test.py
python aloha_sim/tasks/test/hand_over_test.py
...# all tests
python -m unittest discover aloha_sim/tasks/test '*_test.py'
.
3)推理
使用 Gemini Robotics 模型进行推理 受信任的测试者。如果您不是受信任的测试者,请在此注册 此处 .
请遵循 SDK 文档 来部署模型。用于真实世界评估的相同模型可以直接应用于模拟。
(1)安装 SDK 依赖
pip install aloha_sim[inference]
(2)交互式展开
使用选定任务启动查看器:
# defaut task: "put the banana in the bowl"
python aloha_sim/viewer.py# "remove the cap from the marker"
python aloha_sim/viewer.py --task_name=MarkerRemoveLid# "place the can opener in the left compartment of the caddy"
python aloha_sim/viewer.py --task_name=ToolsPlaceCanOpenerInLeftCompartment
...
查看 task_suite.py 获取所有可用任务列表。
您可以使用查看器暂停/继续环境,与对象交互,并为机器人输入新指令。
Instructions for using the viewer:- shift + 'i' = enter new instruction
- space bar = pause/resume.
- backspace = reset environment.
- mouse right moves the camera
- mouse left rotates the camera
- double-click to select an objectWhen the environment is not running:- ctrl + mouse left rotates a selected object
- ctrl + mouse right moves a selected objectWhen the environment is running:- ctrl + mouse left applies torque to an object
- ctrl + mouse right applies force to an object
(3)评估
python aloha_sim/run_eval.py
对所有任务运行 N 个评估周期,并将视频保存在 /tmp/。
.
.
参考
Gemini Robotics:https://deepmind.google/discover/blog/gemini-robotics-brings-ai-into-the-physical-world/
Gemini Robotics On-Device:https://deepmind.google/discover/blog/gemini-robotics-on-device-brings-ai-to-local-robotic-devices/
Gemini Robotics SDK:https://github.com/google-deepmind/gemini-robotics-sdk
MuJoCo物理模拟器:https://github.com/google-deepmind/aloha_sim
可信测试者计划注册:https://docs.google.com/forms/d/1sM5GqcVMWv-KmKY3TOMpVtQ-lDFeAftQ-d9xQn92jCE/viewform?ts=67cef986&edit_requested=true
.
声明:资源可能存在第三方来源,若有侵权请联系删除!