《用于几何广义断层触觉传感的图结构超分辨率:在仿人面部的应用》论文解读
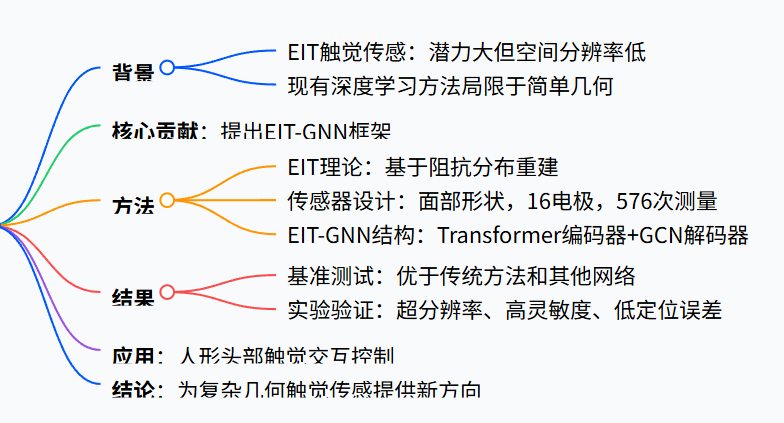
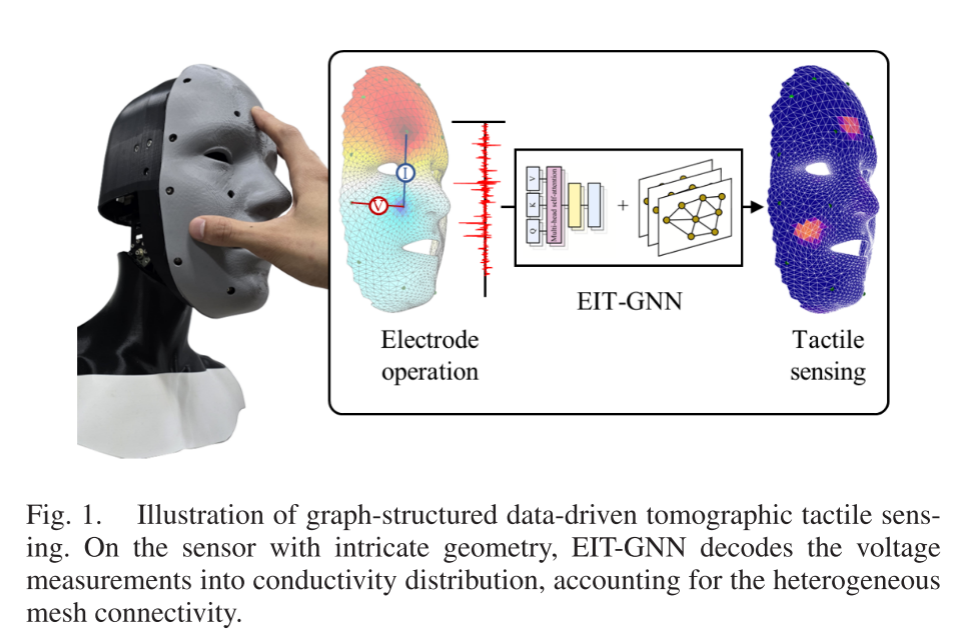
本文提出EIT-GNN,一种基于图结构的数据驱动框架,用于解决电阻抗断层成像(EIT)触觉传感的低空间分辨率问题。该框架将任意传感器形状表示为网格连接,通过Transformer 编码器和图卷积网络(GCN) 的双重架构,实现了复杂几何形状(如人形面部)的超分辨率触觉感知。实验验证显示,EIT-GNN 在空间分辨率、灵敏度、定位误差(平均 5.499mm)等指标上优于现有方法,并成功应用于人形头部的触觉交互控制,为机器人复杂几何触觉传感提供了新方案。
目录
一、为什么需要这项研究?
二,相关工作:前人做了什么,我们补了什么?
三,方法:EIT-GNN 是怎么实现的?
1. 先搞懂 EIT 的基本原理
2. 做一个 “人脸皮肤” 传感器
3. EIT-GNN 的 “大脑”:怎么把电压变成触摸细节
4. 给模型 “喂练习题”:模拟数据训练
四、结果:实验证明 EIT-GNN 真的更准
1. 基准测试:各种形状都能打
2. ablation 研究:哪些模块最重要
3. 单点触摸测试:细节拉满
4. 复杂触摸也能搞定
5. 为什么 EIT-GNN 更准?
五、应用:机器人能用它做什么?
六、讨论和结论
一、为什么需要这项研究?
机器人和人互动时,“触觉” 很重要 —— 就像人用皮肤感知触摸一样,机器人也需要 “皮肤” 来知道哪里被碰了、力度多大。但给机器人做 “皮肤” 有个难题:
简单的传感器(比如一排排的 “触觉点”)要么数据太多传不过来,要么只能贴在平面上,遇到人脸这种凹凸不平的复杂形状就不行了。
有一种叫 “电阻抗断层成像(EIT)” 的技术很有潜力:它不用太多传感器,只要在皮肤上装几个电极,通过测量电压变化就能 “摸” 出触摸的位置,成本低、能适应各种形状,适合做大面积 “皮肤”。但它有个大问题:分辨率太低,摸哪里看得模糊,比如摸脸颊和下巴可能分不清。
能不能让 EIT 变 “清楚”,还能适应人脸这种复杂形状?这就是要解决的问题。
二,相关工作:前人做了什么,我们补了什么?
之前的大面积触觉传感器要么用很多 “触觉点”(数据太多传不动),要么用摄像头(容易被挡住,形状复杂了不行)。EIT 技术虽然好,但之前的深度学习方法只能处理简单形状(比如平面、圆柱)。
而他们的创新是:用 “图结构”(把复杂形状拆成网格)结合深度学习,让 EIT 能处理任意形状,尤其是人脸这种超复杂的。
三,方法:EIT-GNN 是怎么实现的?
1. 先搞懂 EIT 的基本原理
EIT 的本质是 “通过电压猜触摸”:在传感器上装电极,给电流后,触摸会改变局部电阻,导致电压变化。通过电压变化反推触摸位置,就是 “逆问题”(类似通过影子猜物体形状)。
2. 做一个 “人脸皮肤” 传感器
为了测试,他们真的做了一块人脸形状的触觉传感器,步骤像 “做三明治”:
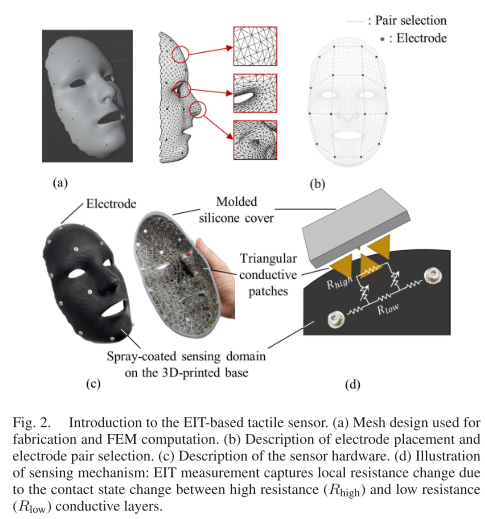
图 2a:先画人脸 3D 模型,再拆成密密麻麻的四面体网格(这些网格是后续计算的 “地图”);
图 2b:在脸上装 16 个电极(对称排列),选相邻的电极成对工作(24 对),最终能测 576 组电压数据;
图 2c、2d:分层制作 “皮肤”——3D 打印硬基底(底层)→ 喷导电喷雾(让电流能跑)→ 贴三角形导电布(被摸时电阻会变)→ 盖 3 毫米软硅胶(像人的皮肤一样软)。
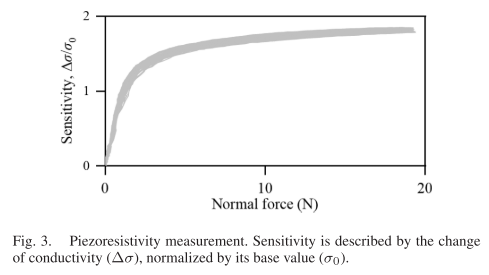
图 3是材料测试:用机器反复按压一小块样品,测它对力度的反应。发现它很稳定(力度越大,电阻变化越规律),超过 12N 会 “饱和”(电阻变化不再增加),这个 “饱和值 1.83” 成了后续判断力度的参考。
3. EIT-GNN 的 “大脑”:怎么把电压变成触摸细节
EIT-GNN 有三个核心模块,像一条 “流水线”:
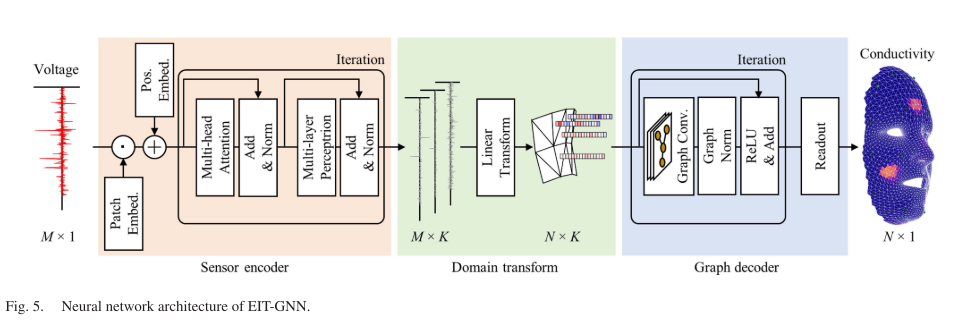
传感器编码器(Transformer):先处理电极测到的电压数据(图 5 左侧)。电压信号很乱,Transformer 像 “信号翻译官”,提取关键信息(比如 “某几个电极的电压变了,可能是左脸被摸了”),还会给每个信号 “贴位置标签”(避免搞混哪个电极测的是哪里);
域转换:把 Transformer 提取的信息 “转个格式”,适配网格的维度;
图解码器(GCN):根据图 2a 的网格连接关系,细化触摸信息(图 5 右侧)。比如网格 A 被摸了,GCN 会参考相邻的网格 B、C 的数据,让 A 的信号更突出,最终算出每个网格的触摸强度(输出热图)。
4. 给模型 “喂练习题”:模拟数据训练
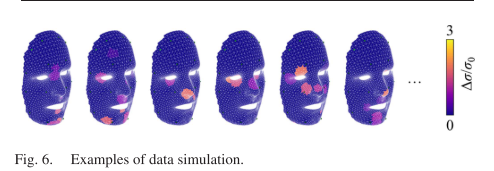
因为很难直接测真实触摸的 “标准答案”,他们用软件生成了 18 万组 “模拟触摸数据”(像给学生做练习题)。图 6展示了这些 “练习题”:有单点摸、多点摸、大 / 小范围摸(半径 5-15mm),确保模型学完后能应对各种情况。
四、结果:实验证明 EIT-GNN 真的更准
他们做了一堆实验,对比 EIT-GNN 和传统方法(比如迭代算法)、其他神经网络(比如 MLP、CNN),看谁的 “触觉” 更好。
1. 基准测试:各种形状都能打

测试了平面、曲线边界、人脸、圆柱等形状,发现 EIT-GNN 在所有形状上的误差(加权 MSE)都最小,而且模型参数更少(更高效)。比如人脸形状上,EIT-GNN 的误差是 0.0146,比传统方法(0.0403)小很多。
2. ablation 研究:哪些模块最重要
就像拆零件看哪个最关键:
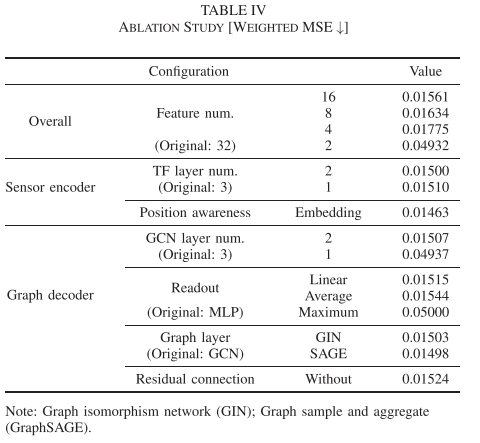
特征数量越多(比如 32 比 16 好)、网络层数越多(3 层比 1 层好),效果越好;
Transformer 的 “位置编码” 和 GCN 的 “残差连接” 很重要,去掉会变准。
3. 单点触摸测试:细节拉满
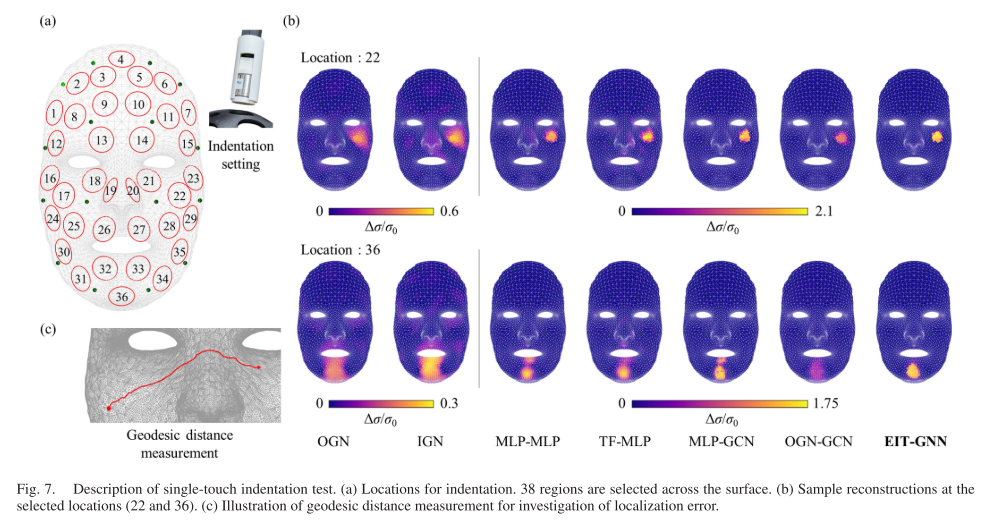
用机械臂在人脸的 36 个位置(图 7a)按压,测四个关键指标:
分辨率(RES50/25):EIT-GNN 的 RES25 达 79%(触摸边界最清晰,图 7b 里它的红色区域边缘最锐利);
灵敏度:对力度变化的反应最均匀(不同位置的灵敏度差异小);
抗干扰(NSR):噪声信号比只有 0.26(触摸区外几乎没杂讯,图 7b 里其他方法有很多杂色);
定位误差:用 “测地线距离”(沿人脸表面量距离,图 7c)算,误差只有 5.5mm(传统方法 13mm,摸左眼不会错判成右眼)。
4. 复杂触摸也能搞定
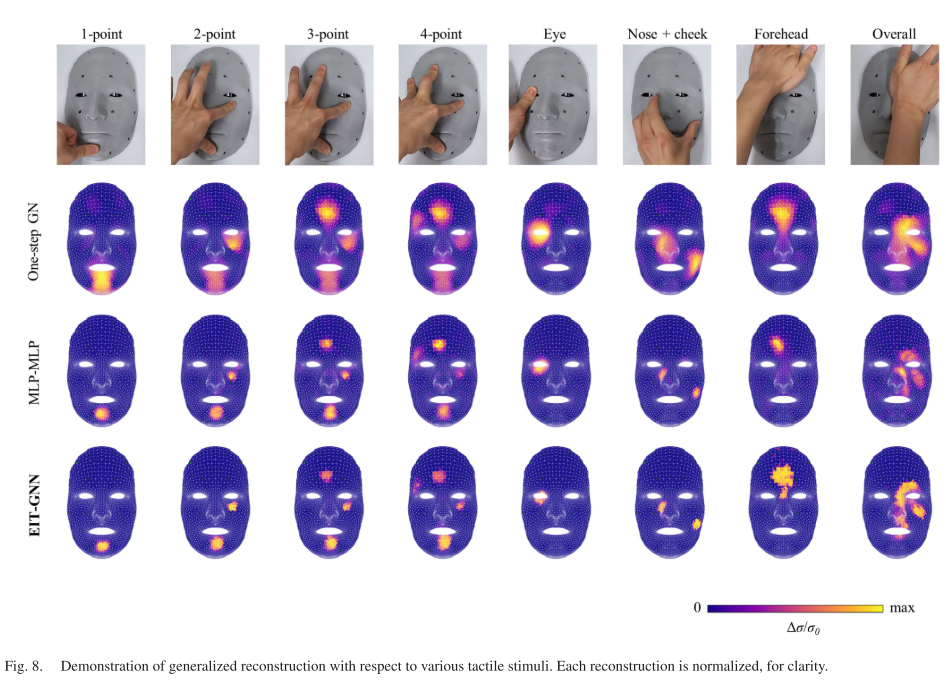
测试了 “多点摸”“大面积摸”“摸眼睛 / 鼻子这种凹凸处”,传统方法直接懵圈,而 EIT-GNN 能清晰分辨每个触摸点(图 8 里它的重建图和实际触摸最像)。
5. 为什么 EIT-GNN 更准?
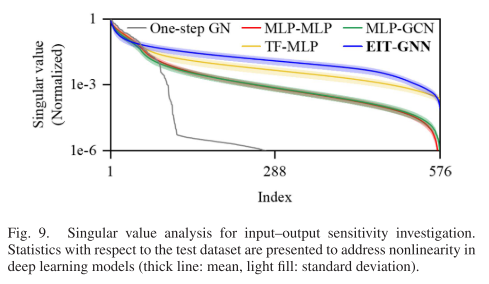
图 9(奇异值分析):EIT-GNN 处理信号时,“奇异值” 更均匀(曲线平缓),说明它抗干扰能力强(像好收音机,杂音再大也能听清);
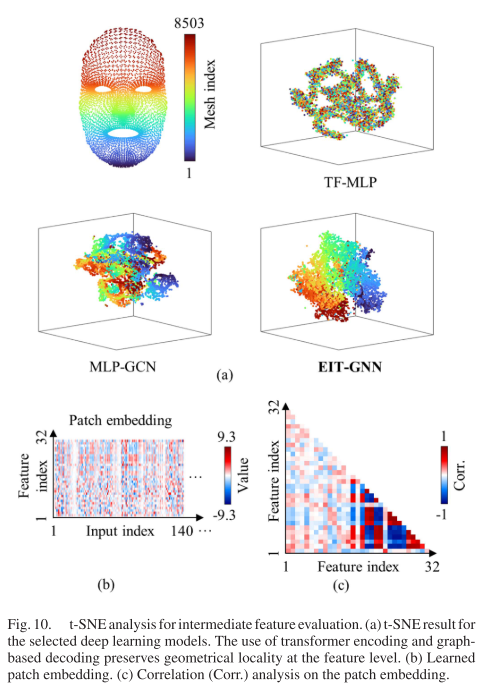
图 10(t-SNE 分析):看模型 “脑子里” 的特征分布,EIT-GNN 的特征更有规律(图 10a 左),说明 Transformer 和 GCN 配合得好,能把信号整理得更有序。
五、应用:机器人能用它做什么?
他们把 “人脸皮肤” 装在带电机的机器人头部,让机器人能通过触摸互动(对应图 11、12、13):
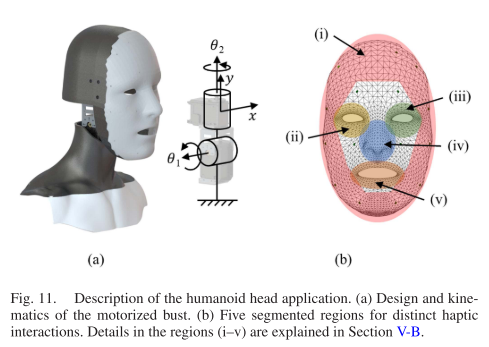
图 11:机器人头部有两个电机(控制低头 / 抬头、左转 / 右转),脸上分 5 个互动区(脸颊、左右眼、嘴巴、鼻子);
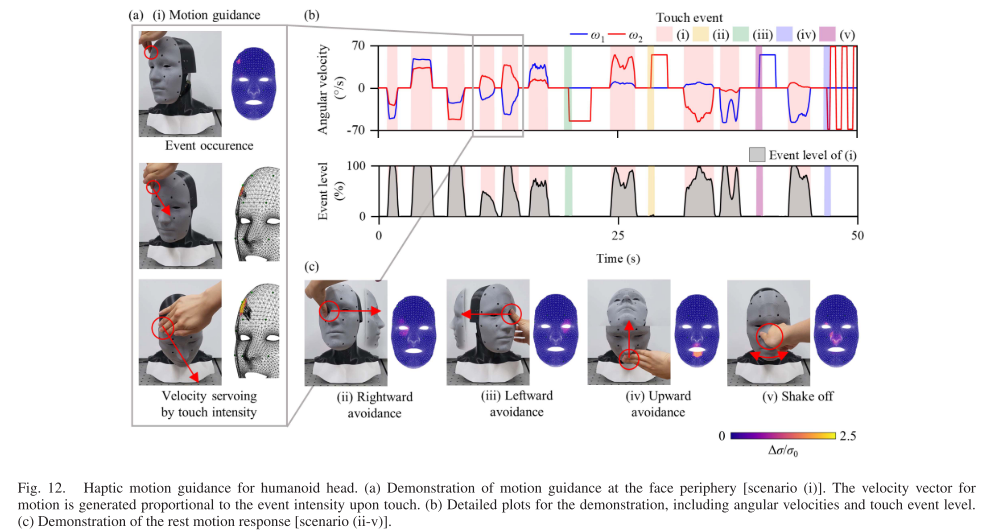
图 12:摸脸颊,头会跟着转;摸眼睛 / 嘴巴,头会躲开;捏鼻子,头会摇一摇(像 “不喜欢”);
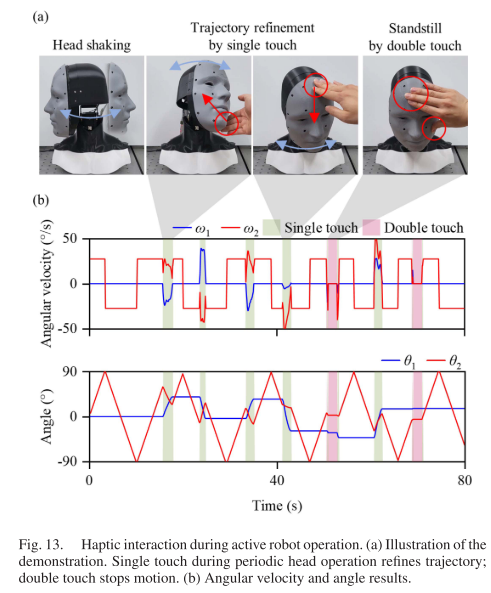
图 13:还能分辨 “单摸” 和 “双摸”—— 单摸时调整动作,双摸时停下。
六、讨论和结论
贡献:让 EIT 技术能在任意复杂形状上实现高分辨率触摸感知,尤其在人脸这种超复杂结构上效果显著。
不足:训练模型要 40 多小时,反应速度还不够快(需要 1000 次 / 秒才够灵活),未来要优化。
总之,这项技术让机器人的 “皮肤” 更灵敏、更贴合复杂形状,以后服务机器人、陪护机器人可能会用它,和人互动更自然 —— 就像机器人真的有了 “会感知的脸”。