像素、视野、光源,都有哪些因素影响测量精度?
最近有不少朋友问我,“机器视觉系统的检测精度到底能做到多高?”其实,这个问题的答案没有统一标准,因为影响视觉系统精度的因素有很多。今天,我们就来聊一聊,哪些因素直接决定了机器视觉的精度。
1. 相机像素——精度的基础
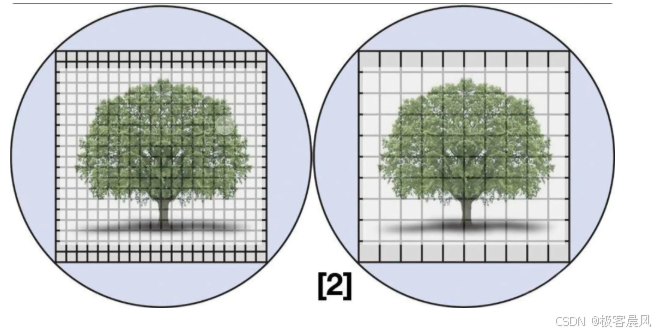
首先,咱们得从相机像素开始说起。你得知道,每一张图片都是由一个个小小的像素点构成的,而这些像素点越密集,图像也就越清晰。换句话说,像素越高,视觉系统能够捕捉到的细节就越丰富,进而提高检测精度。
举个例子:
- 假设有一张实际尺寸是 30mm×20mm 的图片,而相机的分辨率是 3000×2000(600万像素),那么每个像素对应的实际尺寸大概是 0.01mm。
- 但如果你用一台 2000万像素(5400×3600分辨率) 的相机,图像的每个像素就能代表 0.005mm,也就是说,图像细节会更加精细,精度自然就提升了。
你看,相机的像素数对精度影响可大着呢。所以,第一步,选择一个高像素的相机是非常重要的!
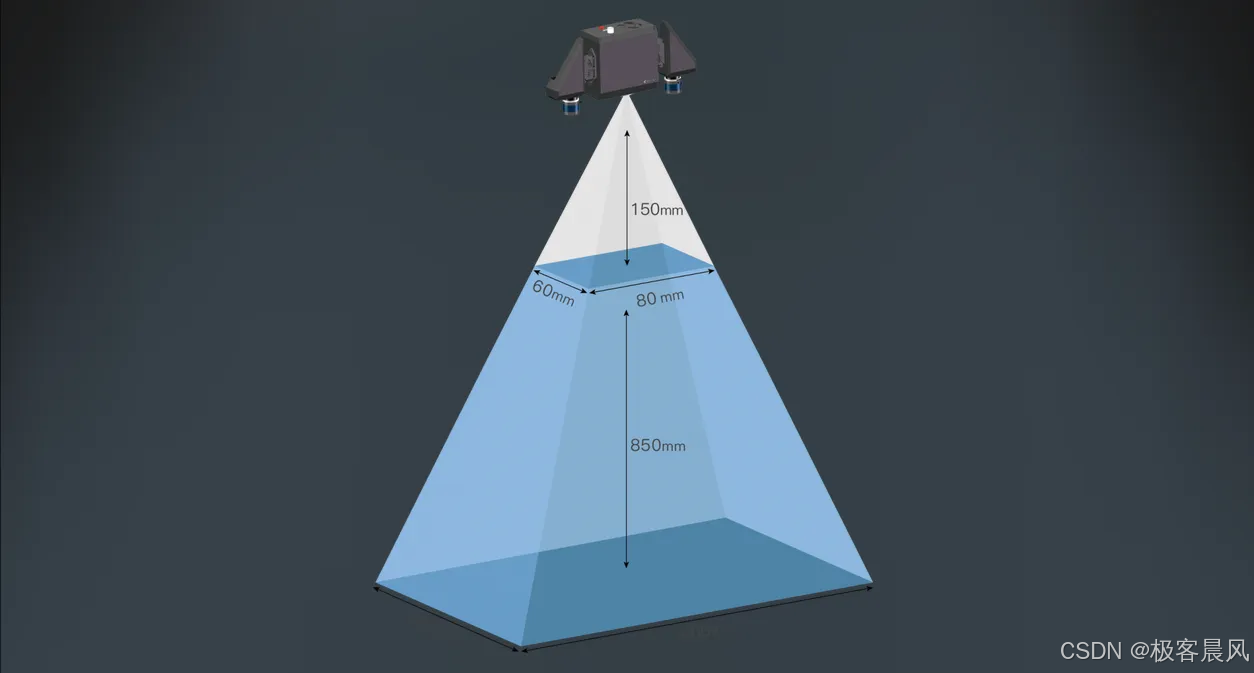
2. 视野范围——大视野=低精度?
选好相机后,接下来要考虑的是拍摄的 视野范围。你可能会想,“视野越大,不就能看到更多细节吗?”其实,视野越大,每个像素代表的实际尺寸就会变大,导致精度反而下降。
举个简单的例子:
- 小范围拍摄:每个像素占据的物理空间较小,系统可以更精确地测量细节。
- 大范围拍摄:虽然能看到更多的内容,但每个像素的“代表面积”增大,测量误差也更大。
所以,你在看到一些精密检测的应用时,会发现视野通常比较小,这样可以更充分地利用每一个像素的精度。
3. 光源——精准测量的“隐形英雄”
你知道吗,光源在机器视觉系统中的作用远比你想象的要重要!在进行尺寸测量时,合适的光源能够让图像中的边缘更清晰,帮助系统更好地分辨细节,从而提高精度。

光源的不同选择:
- 底部发光的背光源:从物体底部向上照射,通常用来产生清晰的黑白对比,使得物体的边缘更加明显。
- 侧面导光的背光源:从侧面照射,适用于强调物体轮廓的场景。
- 平行背光源:适用于大面积平面检测。
- 远心平行光源:这种光源搭配远心镜头使用,能够消除因物体距离镜头不同而产生的光强差异,保证边缘轮廓非常清晰,是高精度测量的理想选择。
打光的方式直接决定了检测精度,所以一定要选择适合的光源。
4. 镜头选择——精准测量的“好帮手”
说到镜头,有些朋友可能会觉得,镜头就是镜头,没啥好挑的。但其实,镜头的好坏直接关系到成像的质量,尤其是在高精度测量时,选择合适的镜头至关重要。

远心镜头的优势:
普通镜头有个缺点,就是如果物体离镜头远近不一,可能会导致成像畸变或放大倍数不一致,这在测量时容易产生误差。而远心镜头的设计可以避免这个问题,它可以保持物体的实际尺寸不变,消除畸变,确保测量精度。
所以,在精密测量时,远心镜头简直就是“必选项”!
5. 软件算法——精度提升的幕后推手
硬件都选得不错了,但软件算法也是至关重要的一环。最终的检测精度往往是由硬件和软件的配合来决定的,优秀的算法能够最大化地减少误差,优化图像处理效果。


算法如何提升精度:
- 检测直线的精度:一般能够控制在 1~2个像素之间。
- 测量圆弧的直径:误差范围通常为 0.2~1个像素。
所以,即使你拥有一台超高像素的相机,如果没有强大的算法做支撑,精度也难以提升。
6. 外部环境——稳定性同样重要
最后,我们还得考虑一些外部因素,比如震动、温差、物体位置等,这些因素都会影响图像质量,进而影响检测精度。比如:

- 震动:机器在运行过程中可能会产生微小震动,影响相机的稳定性,导致图像偏移。
- 温差:温度变化可能导致设备出现微小的变形,影响图像质量。
- 物体位置:物体的放置位置不准确,也会导致测量结果产生误差。
为了确保精度稳定,通常在实际项目中,我们会按照像素精度的 2 倍或 3 倍来计算,这样可以给环境的变化留出一定的余量,确保最终测量结果的可靠性。
总结:机器视觉检测精度的关键要素
综合来看,机器视觉的检测精度是由多种因素共同决定的,而每个环节都不可忽视。要做到高精度检测,你需要关注以下几点:
- 选择合适的 高像素相机,让图像细节更清晰;
- 合理设置 视野范围,确保每个像素的精度得到最大利用;
- 选择合适的 光源,让物体的边缘更加分明;
- 使用 远心镜头,避免成像畸变;
- 优化 软件算法,提高图像处理的准确性;
- 控制 外部环境,确保系统稳定运行。
如果你想让你的机器视觉系统达到高精度,那就得“好马配好鞍”,硬件、软件、环境三者缺一不可!你学会了吗?
希望这篇文章能为你提供一些有用的见解!如果你对机器视觉有更多问题或经验,欢迎在评论区与我们分享!